Информационно-измерительная система пирометрического типа для малоразмерного беспилотного летательного аппарата (бпла) презентация
- Информационно-измерительная система пирометрического типа для малоразмерного беспилотного летательного аппарата (бпла)

Содержание
- 2. Цель работы: Разработка теоретических основ проектирования микросистемной авионики микро- и мини-БПЛА, включающих вывод концепции и методики
- 3. Научные задачи: разработка структуры авионики, определение её конструкции и элементного состава; выбор конструкции планера БПЛА, определение
- 4. Основные положения диссертации выносимые на защиту и обладающие научной новизной: Концепция интегрированной модульной авионики современного БПЛА,
- 5. Способы запуска и посадки БПЛА
- 6. Аэродинамическая компоновка БПЛА БЛА Иркут-850 БПЛА ГрАНТ БПЛА Инспектор-К01 БПЛА RQ-11 Raven БПЛА MicroB
- 7. Элементы БПЛА в авиамодельной сфере
- 8. Системы ориентации и автопилоты БПЛА КСО CMP41 КСО «Текнол» КСО AHRS510GA Автопилоты Kestrel и MP2128 Обобщённая
- 9. Концепция интегрированной модульной авионики БПЛА «Беркучи» Способы управления полетом а – курсовой; б – маршрутный а)
- 10. Принцип действия пирометрической вертикали (ПВ) Установка ПВ на БПЛА Принцип действия ПВ FMA CPD4 БПЛА FIU-301
- 11. Три способа вычисления углов ориентации 1 2 3
- 12. Разворот пирометрической вертикали на 45 градусов
- 13. Модель ПВ и аппроксимация её рабочей характеристики Функции погрешностей, где 1: F(α)аппр = F(α)±Δ; 2: F(α)
- 14. Экспериментальные статические характеристики ПВ Состав эксперимента Погрешность вычисления угла ПВ Экспериментальные статические характеристики ПВ с 4
- 15. Шумовая характеристика ПВ. Подавление шума с помощью фильтра скользящего среднего Исходный и фильтрованный сигналы Суточные колебания
- 16. Комплексирование по слабосвязанной схеме способом компенсации
- 17. Глубокое комплексирование способом фильтрации
- 18. Подавление помех по каналу ПВ ( Yi - S(Xi) ) > B Способ подавления помех по
- 19. Структурная схема и передаточные функции системы «БПЛА-автопилот»
- 20. Сравнение качества стабилизации Крен, экспериментальные коэф. Крен, рассчитанные коэф. Тангаж, экспериментальные коэф. Тангаж, рассчитанные коэф.
- 21. БПЛА «Беркучи» с ИИС пирометрического типа Взлётная масса: до 2 кг*. Масса полезной нагрузки: до 500
- 22. Аэрофотосъёмка с БПЛА «Беркучи» Фотографии сельхозугодий с борта БПЛА «Беркучи».
- 23. Аэрофотосъёмка с БПЛА «Беркучи» (Колумбия)
- 25. Скачать презентацию
Цель работы:
Разработка теоретических основ проектирования микросистемной авионики микро- и мини-БПЛА, включающих
Цель работы:
Разработка теоретических основ проектирования микросистемной авионики микро- и мини-БПЛА, включающих
Научные задачи:
разработка структуры авионики, определение её конструкции и элементного состава;
выбор конструкции
Научные задачи:
разработка структуры авионики, определение её конструкции и элементного состава;
выбор конструкции
Основные положения диссертации выносимые на защиту и обладающие научной новизной:
Концепция интегрированной
Основные положения диссертации выносимые на защиту и обладающие научной новизной:
Концепция интегрированной
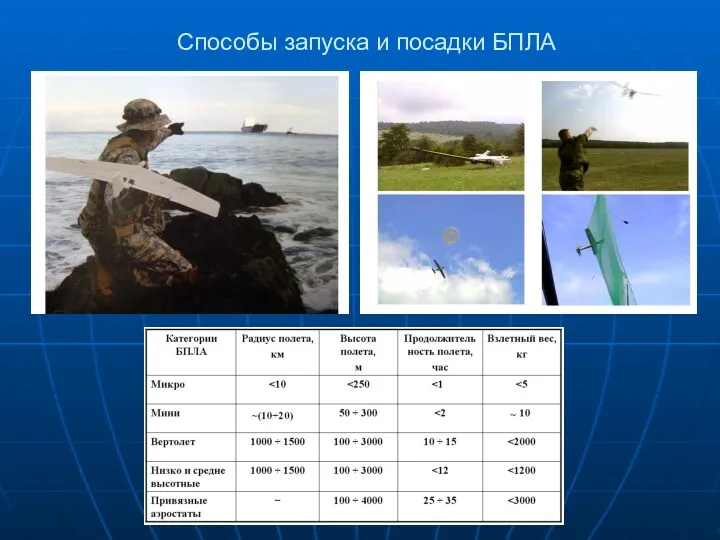
Способы запуска и посадки БПЛА
Способы запуска и посадки БПЛА

Аэродинамическая компоновка БПЛА
БЛА Иркут-850
БПЛА ГрАНТ
БПЛА Инспектор-К01
БПЛА RQ-11 Raven
БПЛА MicroB
Аэродинамическая компоновка БПЛА
БЛА Иркут-850
БПЛА ГрАНТ
БПЛА Инспектор-К01
БПЛА RQ-11 Raven
БПЛА MicroB

Элементы БПЛА в авиамодельной сфере
Элементы БПЛА в авиамодельной сфере

Системы ориентации и автопилоты БПЛА
КСО CMP41
КСО «Текнол»
КСО AHRS510GA
Автопилоты
Системы ориентации и автопилоты БПЛА
КСО CMP41
КСО «Текнол»
КСО AHRS510GA
Автопилоты
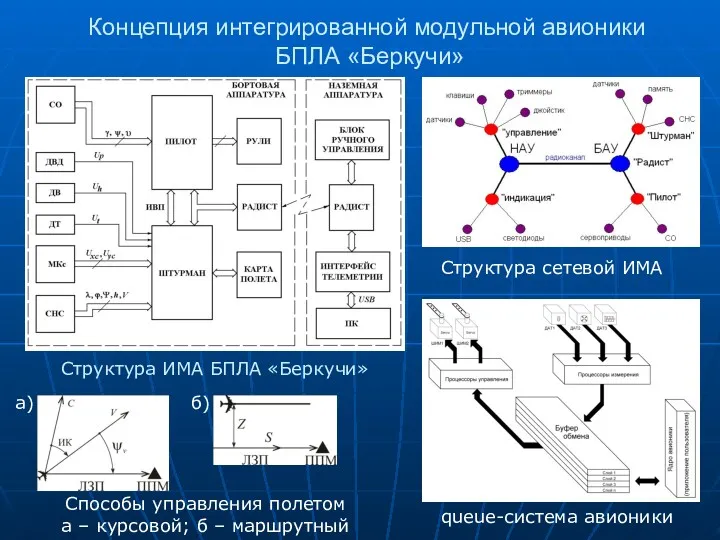
Концепция интегрированной модульной авионики
БПЛА «Беркучи»
Способы управления полетом
а – курсовой;
Концепция интегрированной модульной авионики
БПЛА «Беркучи»
Способы управления полетом
а – курсовой;

Принцип действия пирометрической вертикали (ПВ)
Установка ПВ на БПЛА
Принцип действия ПВ
FMA CPD4
БПЛА
Принцип действия пирометрической вертикали (ПВ)
Установка ПВ на БПЛА
Принцип действия ПВ
FMA CPD4
БПЛА
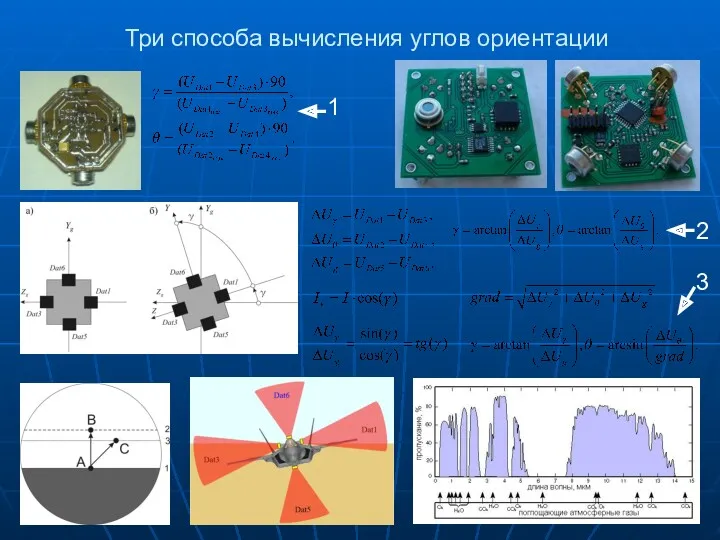
Три способа вычисления углов ориентации
1
2
3
Три способа вычисления углов ориентации
1
2
3
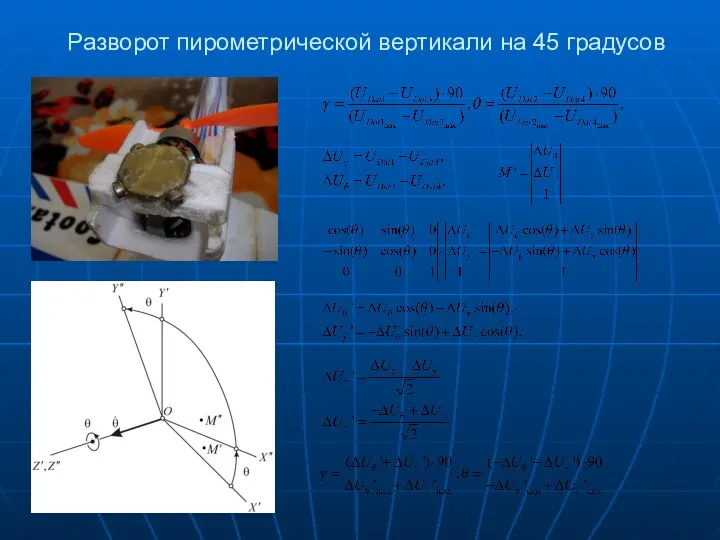
Разворот пирометрической вертикали на 45 градусов
Разворот пирометрической вертикали на 45 градусов
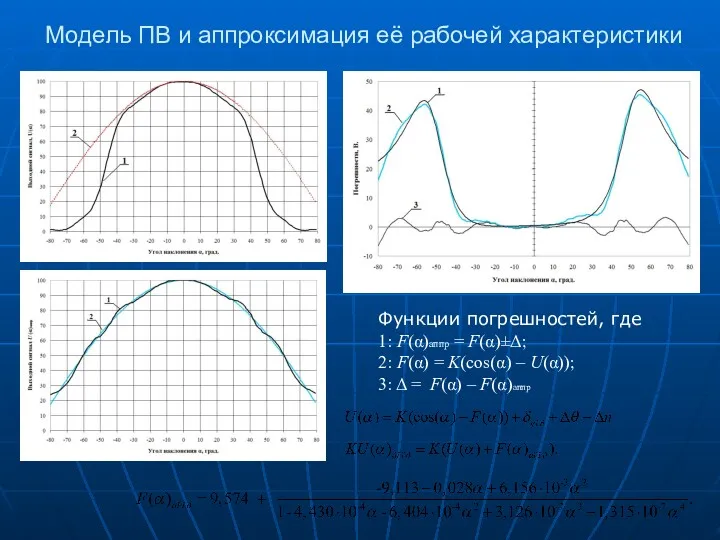
Модель ПВ и аппроксимация её рабочей характеристики
Функции погрешностей, где
1: F(α)аппр
Модель ПВ и аппроксимация её рабочей характеристики
Функции погрешностей, где
1: F(α)аппр
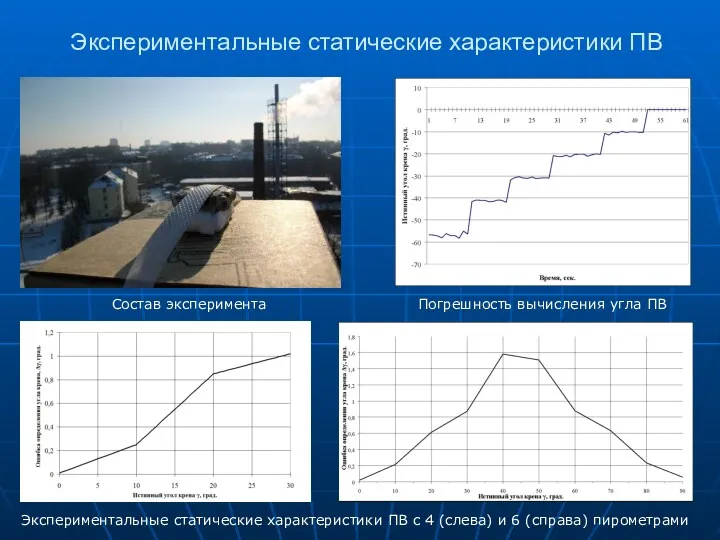
Экспериментальные статические характеристики ПВ
Состав эксперимента
Погрешность вычисления угла ПВ
Экспериментальные статические характеристики ПВ
Экспериментальные статические характеристики ПВ
Состав эксперимента
Погрешность вычисления угла ПВ
Экспериментальные статические характеристики ПВ
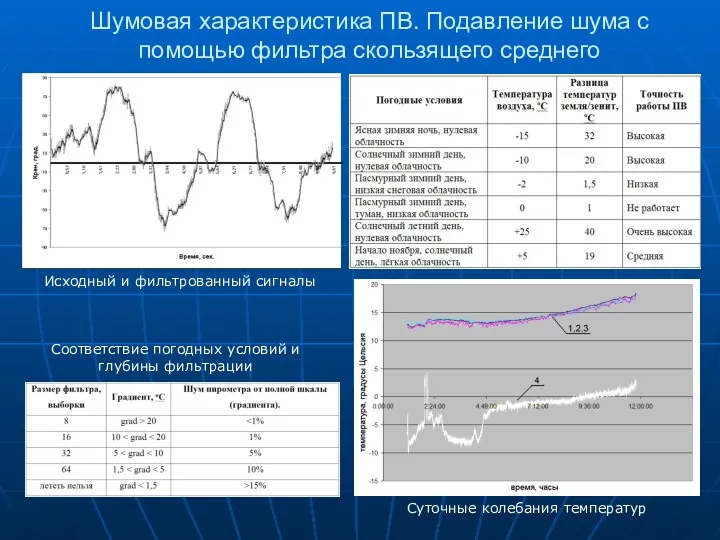
Шумовая характеристика ПВ. Подавление шума с помощью фильтра скользящего среднего
Исходный и
Шумовая характеристика ПВ. Подавление шума с помощью фильтра скользящего среднего
Исходный и
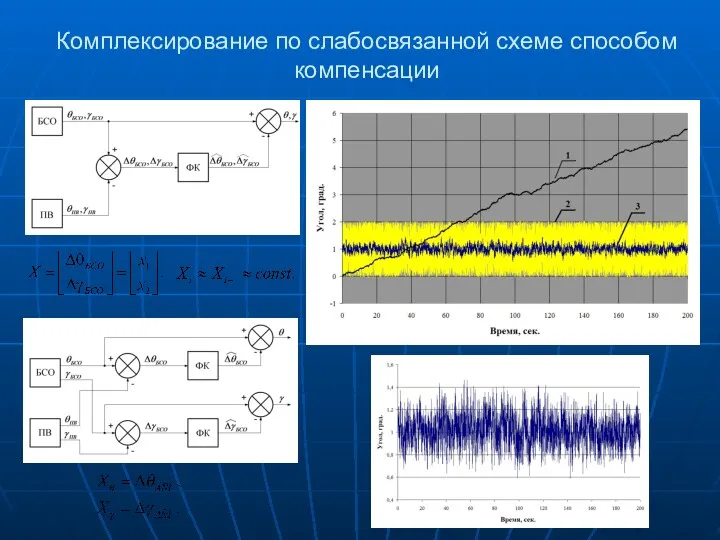
Комплексирование по слабосвязанной схеме способом компенсации
Комплексирование по слабосвязанной схеме способом компенсации
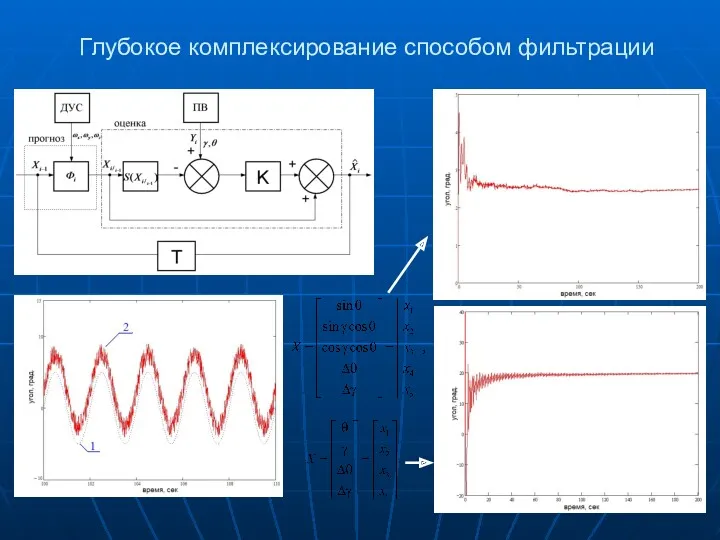
Глубокое комплексирование способом фильтрации
Глубокое комплексирование способом фильтрации
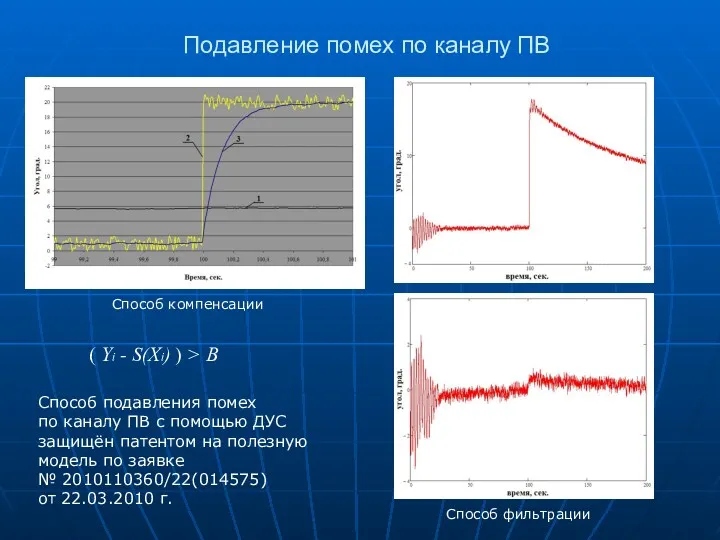
Подавление помех по каналу ПВ
( Yi - S(Xi) ) > B
Подавление помех по каналу ПВ
( Yi - S(Xi) ) > B
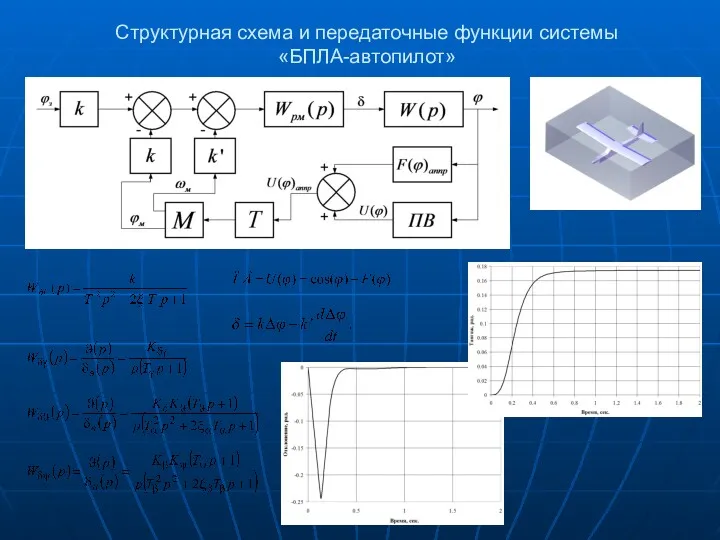
Структурная схема и передаточные функции системы
«БПЛА-автопилот»
Структурная схема и передаточные функции системы
«БПЛА-автопилот»
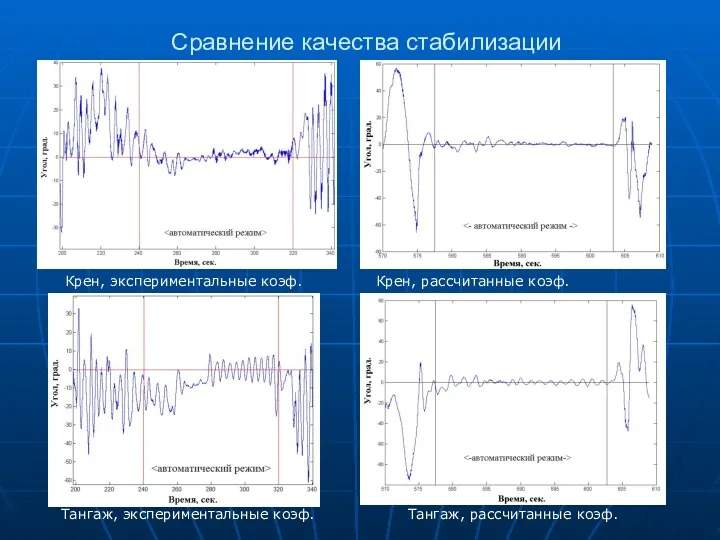
Сравнение качества стабилизации
Крен, экспериментальные коэф. Крен, рассчитанные коэф.
Тангаж, экспериментальные коэф.
Сравнение качества стабилизации
Крен, экспериментальные коэф. Крен, рассчитанные коэф.
Тангаж, экспериментальные коэф.

БПЛА «Беркучи» с ИИС пирометрического типа
Взлётная масса: до 2 кг*.
Масса полезной
БПЛА «Беркучи» с ИИС пирометрического типа
Взлётная масса: до 2 кг*.
Масса полезной

Аэрофотосъёмка с БПЛА «Беркучи»
Фотографии сельхозугодий с борта БПЛА «Беркучи».
Аэрофотосъёмка с БПЛА «Беркучи»
Фотографии сельхозугодий с борта БПЛА «Беркучи».

Аэрофотосъёмка с БПЛА «Беркучи» (Колумбия)
Аэрофотосъёмка с БПЛА «Беркучи» (Колумбия)
 Как заставить себя учиться
Как заставить себя учиться Презентация к реферату: Теория конфликта. Э.Фромм
Презентация к реферату: Теория конфликта. Э.Фромм Постійні магніти. Магнітне поле Землі
Постійні магніти. Магнітне поле Землі Great_Britain
Great_Britain Ребусы
Ребусы История и современное состояние индустрии туризма и гостепримства Крыма
История и современное состояние индустрии туризма и гостепримства Крыма Животные и окружающая среда
Животные и окружающая среда Экологическое развитие старших дошкольников в художественно-творческой деятельности
Экологическое развитие старших дошкольников в художественно-творческой деятельности Разработка проекта наладки РТК на базе станка с ЧПУ на обработку детали Шестерня VIII оси 1к62-02-119
Разработка проекта наладки РТК на базе станка с ЧПУ на обработку детали Шестерня VIII оси 1к62-02-119 Conditional. Условные предложения
Conditional. Условные предложения Какие бывают животные
Какие бывают животные Методы обработки металлов давлением: прокатка, прессование и волочение
Методы обработки металлов давлением: прокатка, прессование и волочение Мыло, и иные моющие средства
Мыло, и иные моющие средства Культура Средневековья
Культура Средневековья Құрманғазы Сағырбайұлы
Құрманғазы Сағырбайұлы Технологія виробництва м’яса страусів
Технологія виробництва м’яса страусів Накопление эмоционально-чувственного опыта детей при проведении театрализованных представлений в ДОУ
Накопление эмоционально-чувственного опыта детей при проведении театрализованных представлений в ДОУ Проект О перелетных птицах
Проект О перелетных птицах Трудные случаи согласования подлежащего и сказуемого
Трудные случаи согласования подлежащего и сказуемого Луганская область в годы Великой Отечественной войны
Луганская область в годы Великой Отечественной войны Творческий проект Шкатулка
Творческий проект Шкатулка Изготовление изделия Самолет
Изготовление изделия Самолет Сюжет и содержание в картине. Анализ художественного произведения. 7 класс
Сюжет и содержание в картине. Анализ художественного произведения. 7 класс Проектирование генеральных планов промышленных территорий. Лекция 6
Проектирование генеральных планов промышленных территорий. Лекция 6 Соединения химических элементов. Валентность и степень окисления элементов
Соединения химических элементов. Валентность и степень окисления элементов Патоморфология туберкулеза
Патоморфология туберкулеза Использование различных видов театра в работе с детьми
Использование различных видов театра в работе с детьми Урок по теме Закономерности распределения основных элементов климата на территории России
Урок по теме Закономерности распределения основных элементов климата на территории России