- Машины постоянного тока

Содержание
- 2. В принципе действия любой электрической машины лежит закон электромагнитной индукции, который использует две стороны работы магнитного
- 3. МАШИНЫ ПОСТОЯННОГО ТОКА Устройство, принцип действия и области применения машин постоянного тока Имеет неподвижную часть -
- 4. Сердечник якоря - из пластин электротехнической стали – напрессо-вывают на вал. В сердечнике якоря выштампованы пазы,
- 5. Рис. 1.2 Рамка в магнитном поле Принцип действия : возьмем два магнитных полюса. Между ними равномерное
- 6. Электродвигатели постоянного тока имеют: 1. хорошие регулировочные свойства, 2. значительную перегрузочную способность; 3. позволяют получать как
- 7. 2. Способы возбуждения машин постоянного тока Возбудить машину — означает навести в ней основной Ф. Системы
- 8. При независимом возбуждении основной магнитный поток создается постоянными магнитами или обмоткой возбуждения, питаемой от независимого источника.
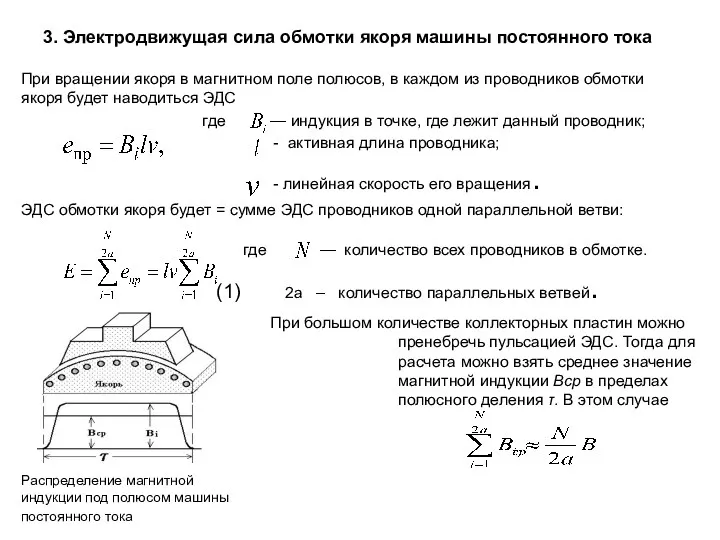
- 9. 3. Электродвижущая сила обмотки якоря машины постоянного тока При вращении якоря в магнитном поле полюсов, в
- 10. Полюсное деление - это часть окружности якоря приходящаяся на один полюс: где — внешний диаметр якоря:
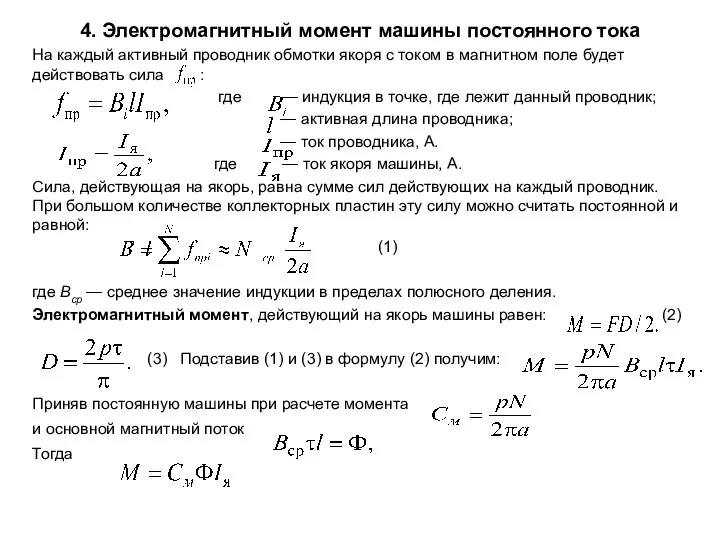
- 11. 4. Электромагнитный момент машины постоянного тока На каждый активный проводник обмотки якоря с током в магнитном
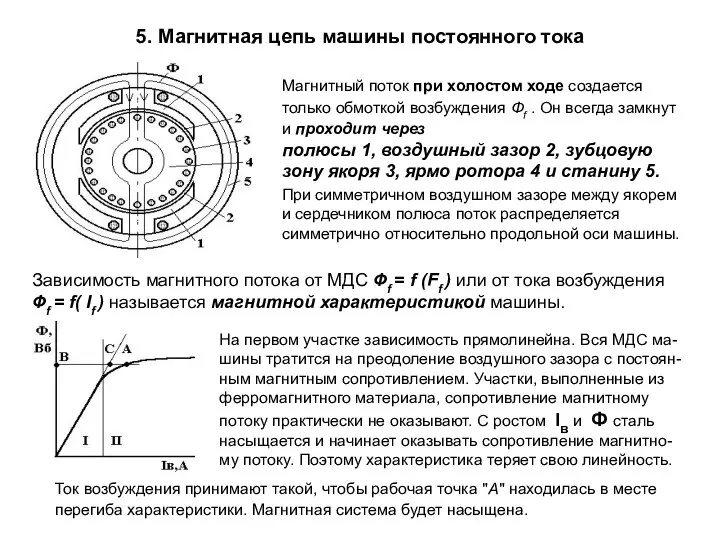
- 12. 5. Магнитная цепь машины постоянного тока Магнитный поток при холостом ходе создается только обмоткой возбуждения Фf
- 13. Степень насыщения характеризуется коэффициентом насыщения — отношением МДС машины к МДС воздушного зазора: Для машины постоянного
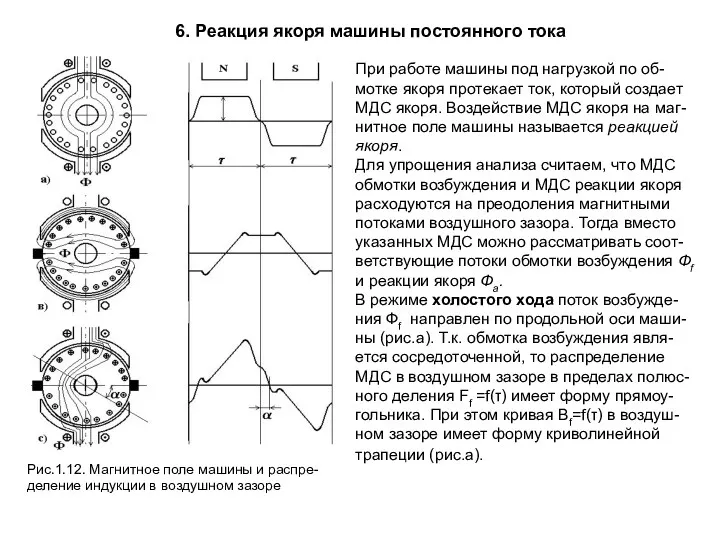
- 14. 6. Реакция якоря машины постоянного тока Рис.1.12. Магнитное поле машины и распре-деление индукции в воздушном зазоре
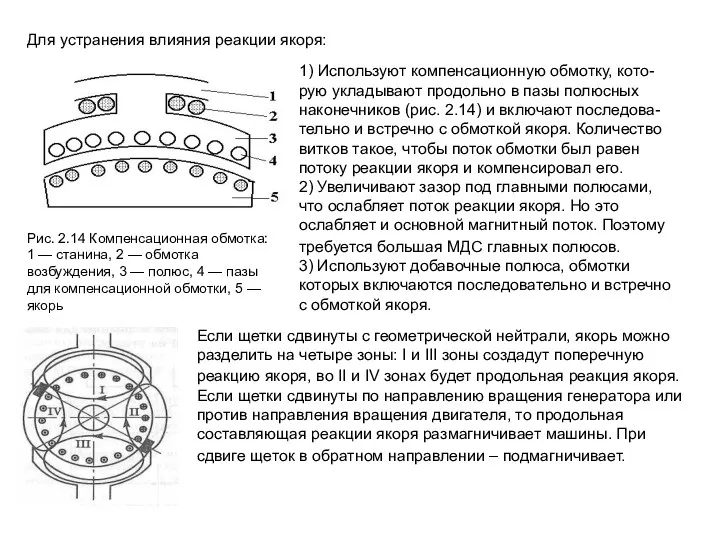
- 15. При работе под нагрузкой, если щетки установлены на геометрическую нейтраль, магнитный поток якоря направлен поперек основного
- 16. Для устранения влияния реакции якоря: Рис. 2.14 Компенсационная обмотка: 1 — станина, 2 — обмотка возбуждения,
- 17. 7. Потери и КПД машины постоянного тока Потери машины постоянного тока рассмотрим на примере двигателя. Энергетическая
- 18. Электрический ток, протекая по обмоткам возбуждения, наводит магнитный поток, который проходит по магнитным цепям машины и
- 19. Коэффициент полезного действия (КПД) — это отношение полезной мощности Р2 к подводимой Р1 . Т.к. ,
- 20. Двигатели постоянного тока Уравнение равновесия ЭДС имеет вид: U = EД + Iяrя где U –
- 21. 8. Характеристики двигателей параллельного возбуждения Характеристики, полученные без дополнительных сопротивлений в цепях двигателя, называются естественными, а
- 22. 3. Механическая характеристика – зависимость частоты вращения якоря от момента на валу двигателя , при U=const.
- 23. Характеристика . Если выражение (2) подставим в формулу (1), получим Из уравнения видно, что рабочая характеристика
- 24. 9. Характеристики двигателей последовательного возбуждения Особенность указанного двигателя в том, что ток возбуждения является током нагрузки,
- 25. Механическая характеристика , при U=const. Выразим ток из формулы (2.68). (2.70) Подставим (2.70) в урав-нение (2.69):
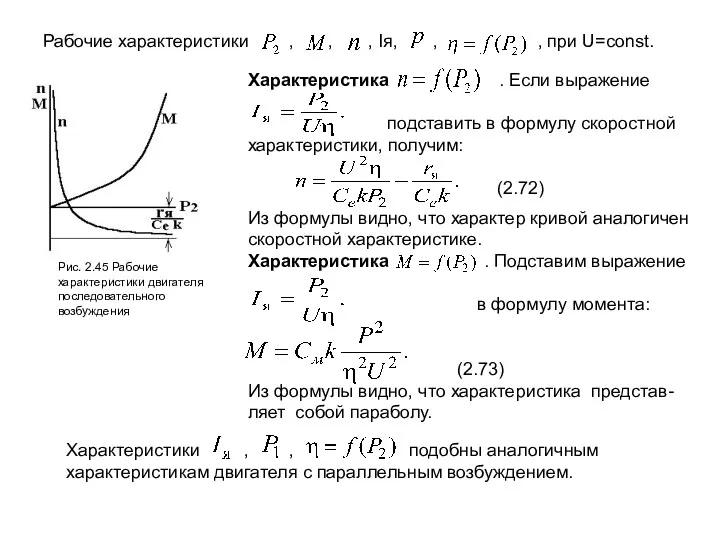
- 26. Рабочие характеристики , , , Iя, , , при U=const. Характеристика . Если выражение подставить в
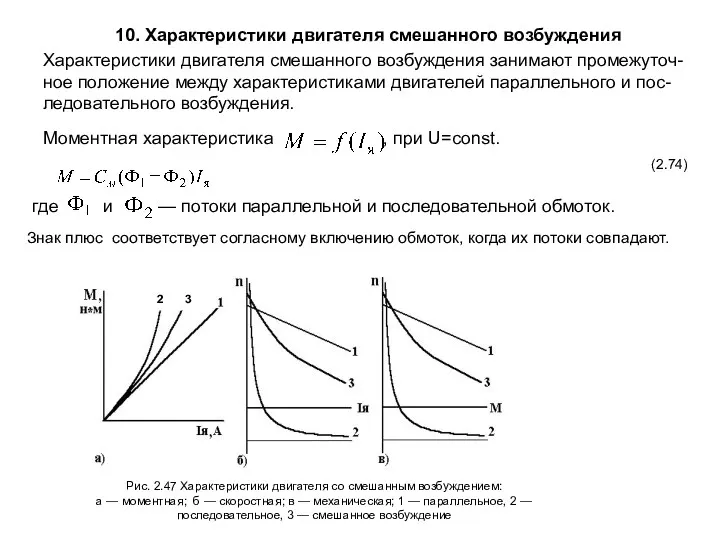
- 27. 10. Характеристики двигателя смешанного возбуждения Характеристики двигателя смешанного возбуждения занимают промежуточ-ное положение между характеристиками двигателей параллельного
- 28. Скоростная (электромеханическая) характеристика , при U=const: (2.75) Механическая характеристика , при U=const: (2.76) Рабочие характеристики: аналогична
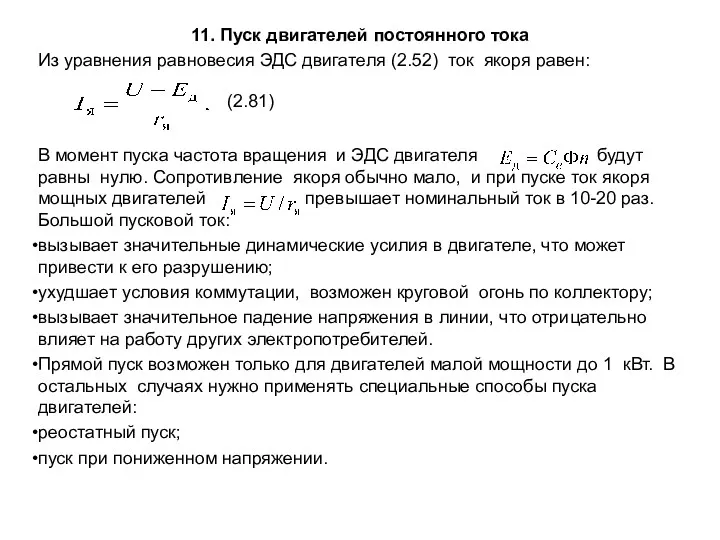
- 29. 11. Пуск двигателей постоянного тока Из уравнения равновесия ЭДС двигателя (2.52) ток якоря равен: (2.81) В
- 30. Схема пуска двигателя с помощью пусковых реостатов приведена на рис. 2.56, а. (б – скоростные характеристики)
- 31. Поэтому в двигателях большой мощности применяют пуск при пониженном напряжении. Для этого необходим регулятор напряжения: регулируемые
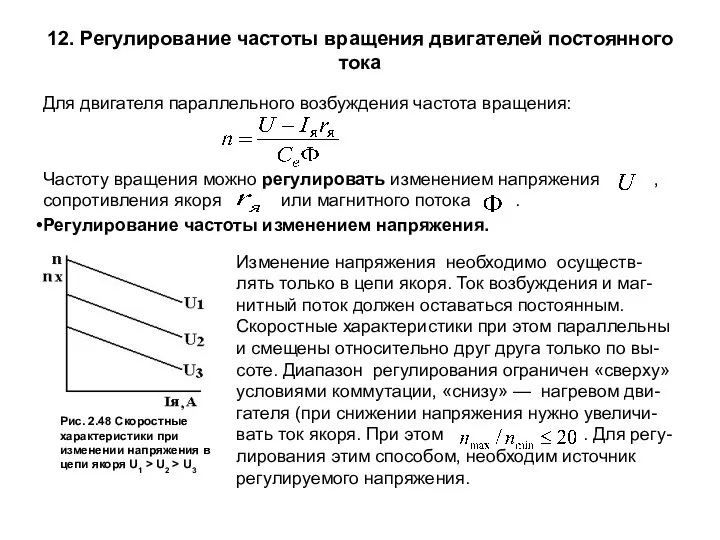
- 32. 12. Регулирование частоты вращения двигателей постоянного тока Для двигателя параллельного возбуждения частота вращения: Частоту вращения можно
- 33. Регулирование частоты вращения изменением сопротивления якорной цепи: Частота вращения холостого хода не изменяется, а изменяется только
- 34. Регулирование частоты вращения изменением магнитного потока. Рис. 2.54 Регулирование частоты вращения изменением магнитного потока: а —
- 35. 25. Торможение двигателей постоянного тока Для того остановить рабочую машину, наряду с механическими, применяют электрические способы
- 36. При переключателе П в положении 2 машина работает двигателем с часто-той вращения якоря и током якоря
- 38. Скачать презентацию
В принципе действия любой электрической машины лежит закон электромагнитной индукции, который
В принципе действия любой электрической машины лежит закон электромагнитной индукции, который

МАШИНЫ ПОСТОЯННОГО ТОКА
Устройство, принцип действия и области применения машин постоянного тока
Имеет
МАШИНЫ ПОСТОЯННОГО ТОКА
Устройство, принцип действия и области применения машин постоянного тока
Имеет
Сердечник якоря - из пластин электротехнической стали – напрессо-вывают на вал.
Сердечник якоря - из пластин электротехнической стали – напрессо-вывают на вал.
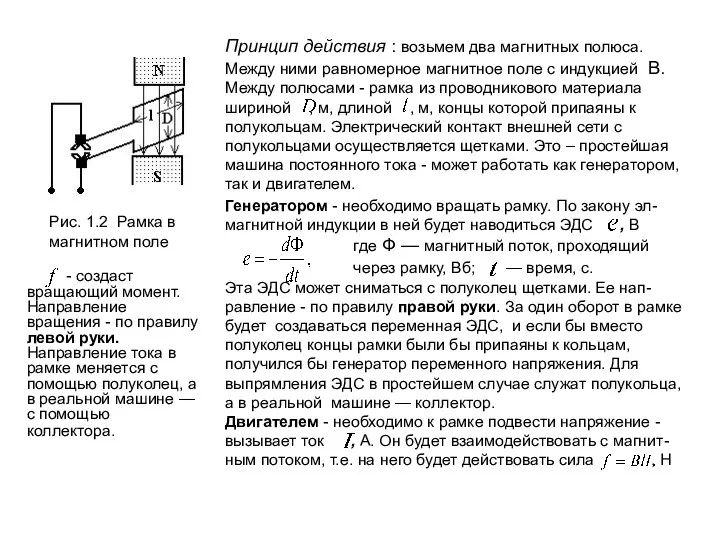
Рис. 1.2 Рамка в магнитном поле
Принцип действия : возьмем два магнитных
Рис. 1.2 Рамка в магнитном поле
Принцип действия : возьмем два магнитных
Электродвигатели постоянного тока имеют:
1. хорошие регулировочные свойства,
2. значительную перегрузочную способность;
Электродвигатели постоянного тока имеют:
1. хорошие регулировочные свойства,
2. значительную перегрузочную способность;

2. Способы возбуждения машин постоянного тока
Возбудить машину — означает навести
2. Способы возбуждения машин постоянного тока
Возбудить машину — означает навести
При независимом возбуждении основной магнитный поток создается постоянными магнитами или обмоткой
При независимом возбуждении основной магнитный поток создается постоянными магнитами или обмоткой
3. Электродвижущая сила обмотки якоря машины постоянного тока
При вращении якоря
3. Электродвижущая сила обмотки якоря машины постоянного тока
При вращении якоря
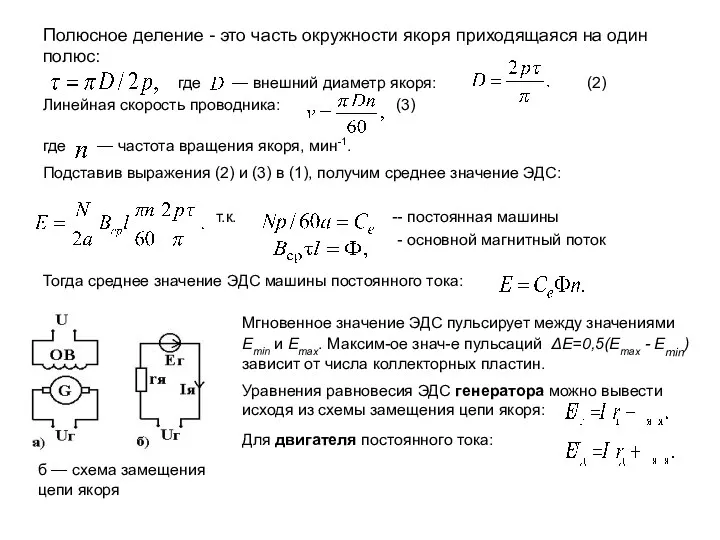
Полюсное деление - это часть окружности якоря приходящаяся на один полюс:
Полюсное деление - это часть окружности якоря приходящаяся на один полюс:
4. Электромагнитный момент машины постоянного тока
На каждый активный проводник обмотки якоря
4. Электромагнитный момент машины постоянного тока
На каждый активный проводник обмотки якоря
5. Магнитная цепь машины постоянного тока
Магнитный поток при холостом ходе
5. Магнитная цепь машины постоянного тока
Магнитный поток при холостом ходе
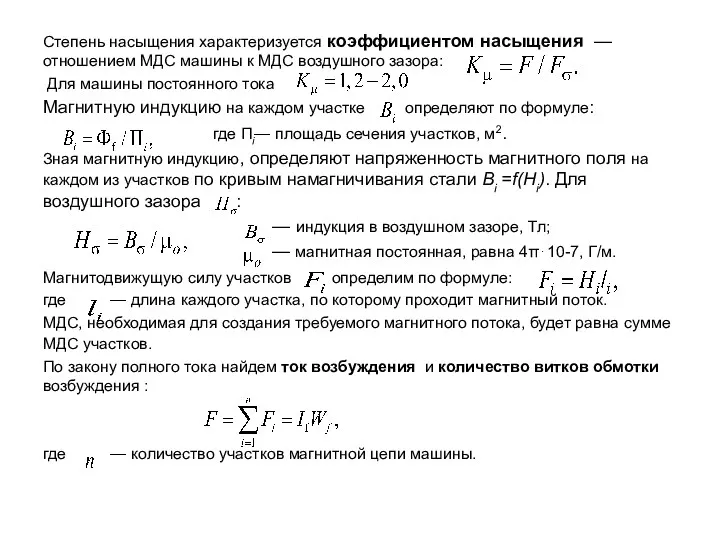
Степень насыщения характеризуется коэффициентом насыщения — отношением МДС машины к МДС
Степень насыщения характеризуется коэффициентом насыщения — отношением МДС машины к МДС
6. Реакция якоря машины постоянного тока
Рис.1.12. Магнитное поле машины и
6. Реакция якоря машины постоянного тока
Рис.1.12. Магнитное поле машины и

При работе под нагрузкой, если щетки установлены на геометрическую нейтраль, магнитный
При работе под нагрузкой, если щетки установлены на геометрическую нейтраль, магнитный
Для устранения влияния реакции якоря:
Рис. 2.14 Компенсационная обмотка:
1 — станина,
Для устранения влияния реакции якоря:
Рис. 2.14 Компенсационная обмотка:
1 — станина,
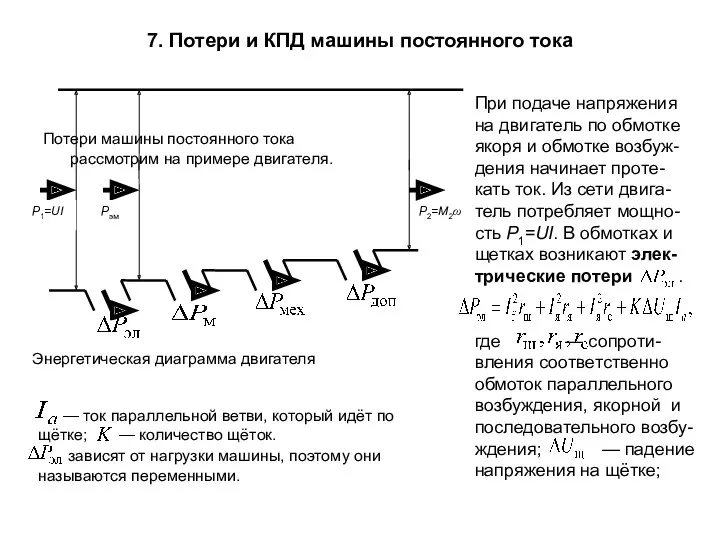
7. Потери и КПД машины постоянного тока
Потери машины постоянного тока рассмотрим
7. Потери и КПД машины постоянного тока
Потери машины постоянного тока рассмотрим
Электрический ток, протекая по обмоткам возбуждения, наводит магнитный поток, который проходит
Электрический ток, протекая по обмоткам возбуждения, наводит магнитный поток, который проходит
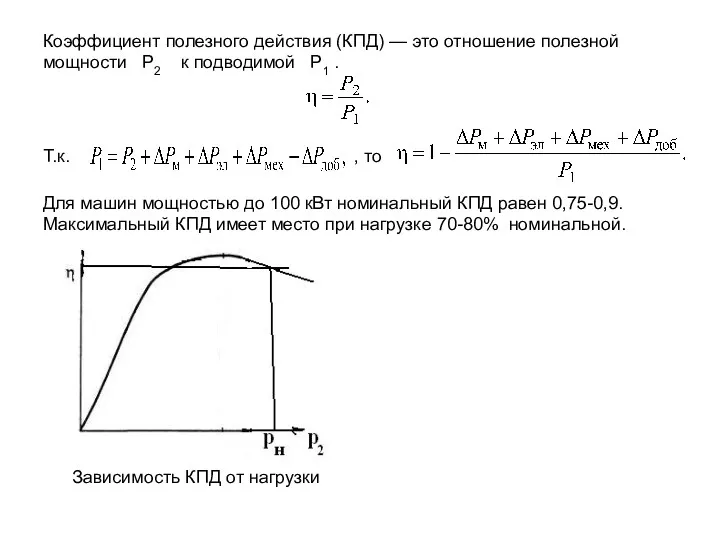
Коэффициент полезного действия (КПД) — это отношение полезной мощности Р2 к
Коэффициент полезного действия (КПД) — это отношение полезной мощности Р2 к
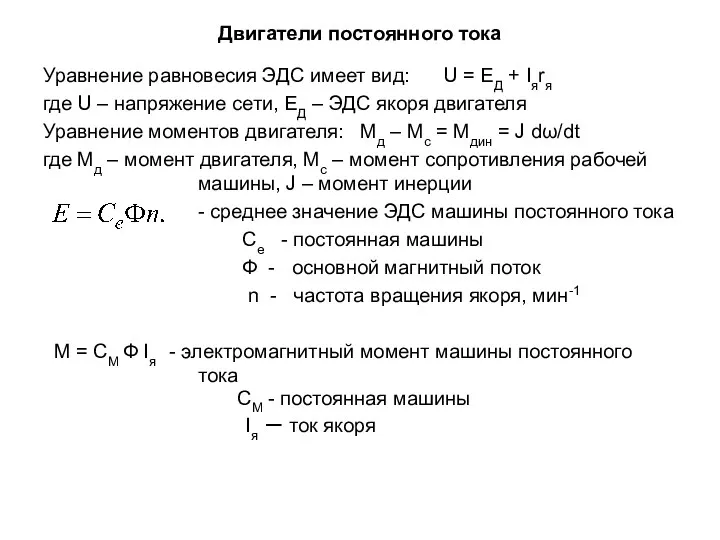
Двигатели постоянного тока
Уравнение равновесия ЭДС имеет вид: U = EД +
Двигатели постоянного тока
Уравнение равновесия ЭДС имеет вид: U = EД +
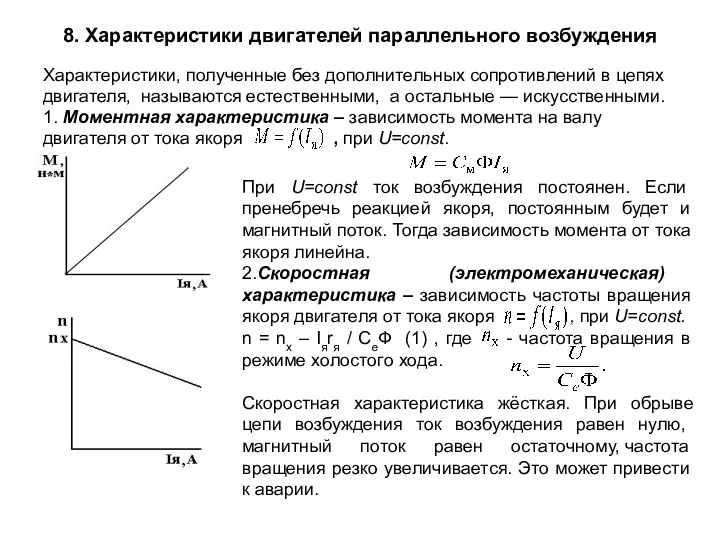
8. Характеристики двигателей параллельного возбуждения
Характеристики, полученные без дополнительных сопротивлений в цепях
8. Характеристики двигателей параллельного возбуждения
Характеристики, полученные без дополнительных сопротивлений в цепях
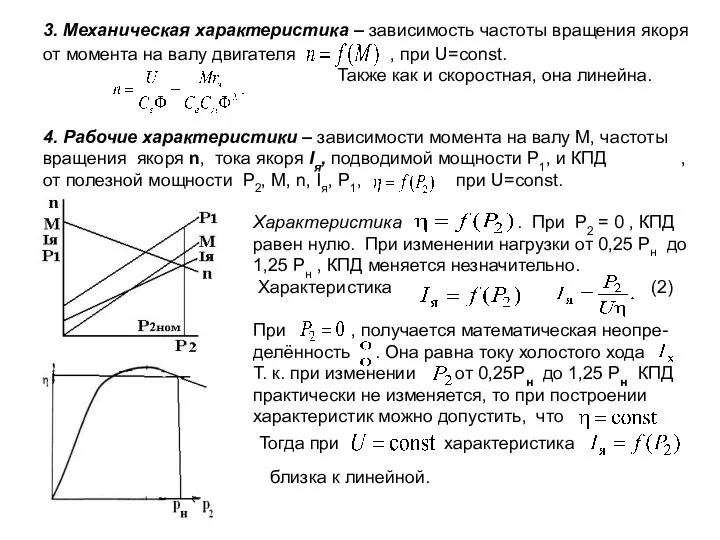
3. Механическая характеристика – зависимость частоты вращения якоря от момента на
3. Механическая характеристика – зависимость частоты вращения якоря от момента на
Характеристика . Если выражение (2) подставим в формулу (1), получим
Из уравнения
Характеристика . Если выражение (2) подставим в формулу (1), получим
Из уравнения
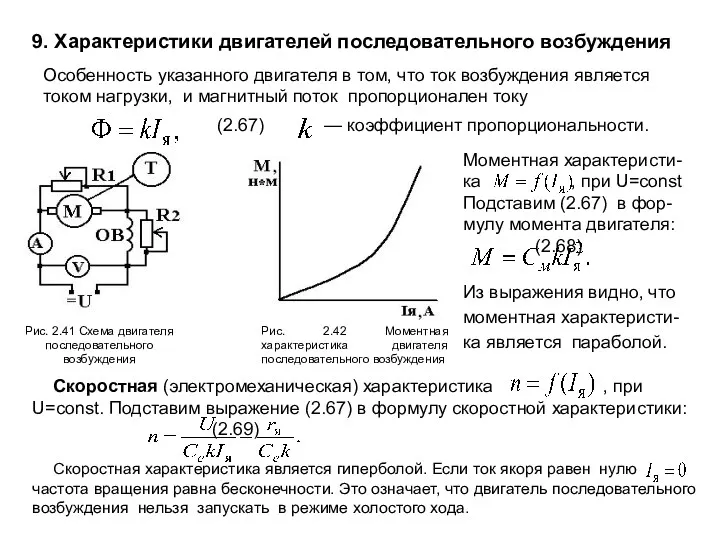
9. Характеристики двигателей последовательного возбуждения
Особенность указанного двигателя в том, что ток
9. Характеристики двигателей последовательного возбуждения
Особенность указанного двигателя в том, что ток
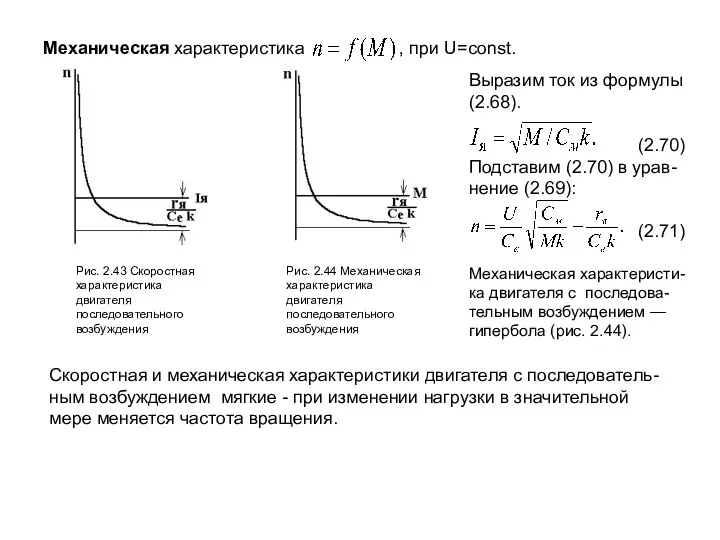
Механическая характеристика , при U=const.
Выразим ток из формулы (2.68).
(2.70)
Подставим
Механическая характеристика , при U=const.
Выразим ток из формулы (2.68).
(2.70)
Подставим
Рабочие характеристики , , , Iя, , , при U=const.
Характеристика .
Рабочие характеристики , , , Iя, , , при U=const.
Характеристика .
10. Характеристики двигателя смешанного возбуждения
Характеристики двигателя смешанного возбуждения занимают промежуточ-ное положение
10. Характеристики двигателя смешанного возбуждения
Характеристики двигателя смешанного возбуждения занимают промежуточ-ное положение
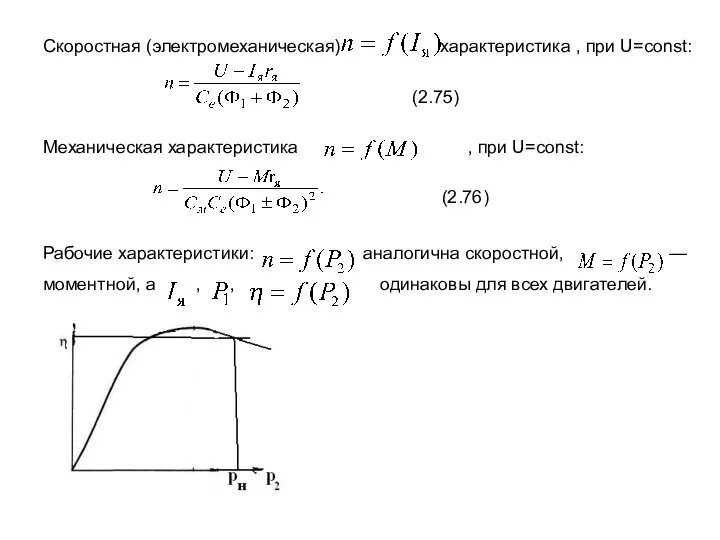
Скоростная (электромеханическая) характеристика , при U=const:
(2.75)
Механическая характеристика , при U=const:
(2.76)
Рабочие
Скоростная (электромеханическая) характеристика , при U=const:
(2.75)
Механическая характеристика , при U=const:
(2.76)
Рабочие
11. Пуск двигателей постоянного тока
Из уравнения равновесия ЭДС двигателя (2.52) ток
11. Пуск двигателей постоянного тока
Из уравнения равновесия ЭДС двигателя (2.52) ток
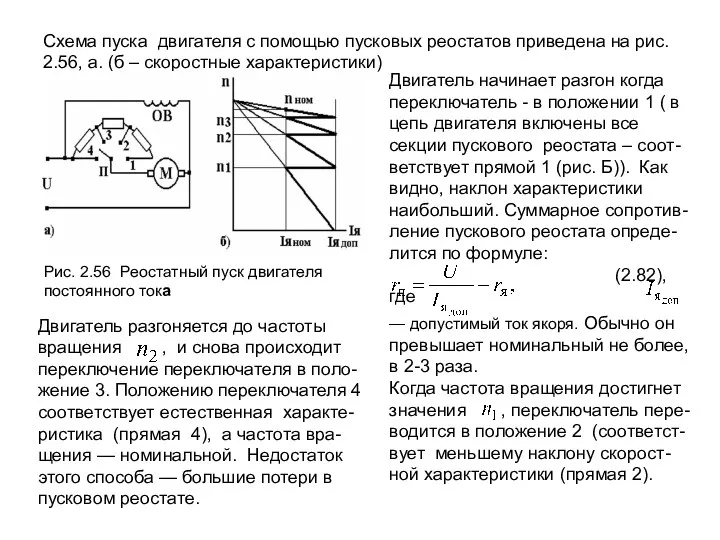
Схема пуска двигателя с помощью пусковых реостатов приведена на рис. 2.56, а.
Схема пуска двигателя с помощью пусковых реостатов приведена на рис. 2.56, а.
Поэтому в двигателях большой мощности применяют пуск при пониженном напряжении.
Для
Поэтому в двигателях большой мощности применяют пуск при пониженном напряжении.
Для
12. Регулирование частоты вращения двигателей постоянного тока
Для двигателя параллельного возбуждения частота
12. Регулирование частоты вращения двигателей постоянного тока
Для двигателя параллельного возбуждения частота
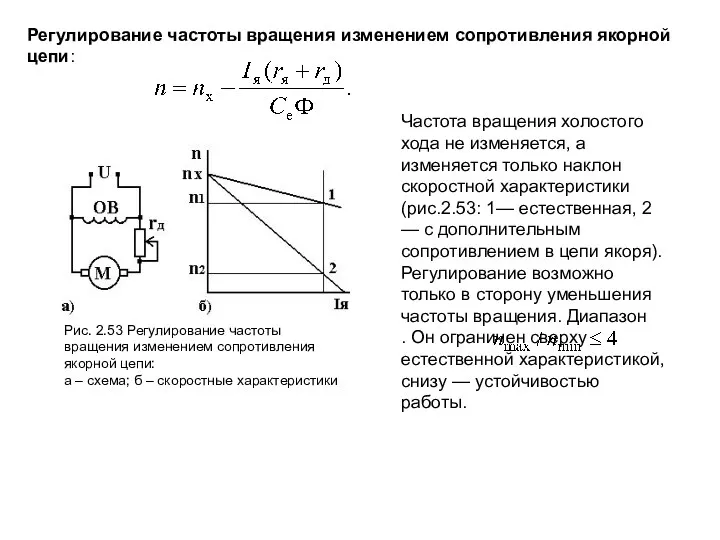
Регулирование частоты вращения изменением сопротивления якорной цепи:
Частота вращения холостого хода не
Регулирование частоты вращения изменением сопротивления якорной цепи:
Частота вращения холостого хода не
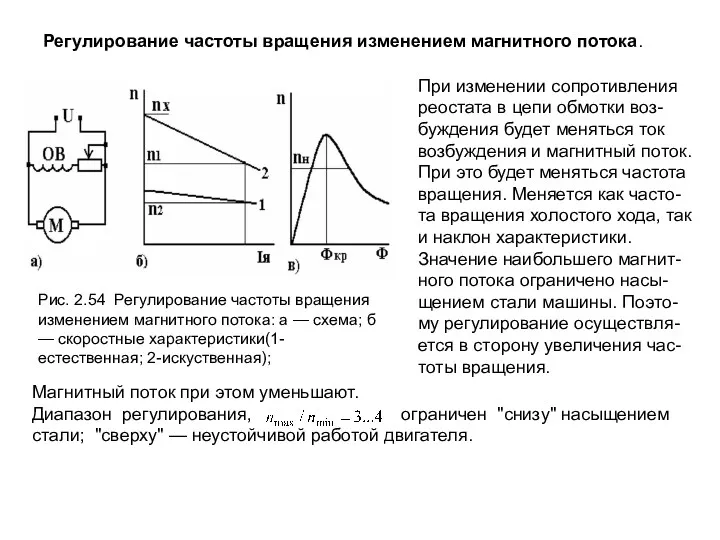
Регулирование частоты вращения изменением магнитного потока.
Рис. 2.54 Регулирование частоты вращения
Регулирование частоты вращения изменением магнитного потока.
Рис. 2.54 Регулирование частоты вращения
25. Торможение двигателей постоянного тока
Для того остановить рабочую машину, наряду с
25. Торможение двигателей постоянного тока
Для того остановить рабочую машину, наряду с

При переключателе П в положении 2 машина работает двигателем с часто-той
При переключателе П в положении 2 машина работает двигателем с часто-той
 Практ.работа № 7
Практ.работа № 7 Профессия: учитель английского языка
Профессия: учитель английского языка Определение расстояний, направлений и географических координат
Определение расстояний, направлений и географических координат Приборы и системы контроля работы авиадвигателей. Авиационные манометры и датчики давления
Приборы и системы контроля работы авиадвигателей. Авиационные манометры и датчики давления Презентация Предмет религиозной культуры в светской школе: проблемы и перспективы.
Презентация Предмет религиозной культуры в светской школе: проблемы и перспективы. Решение кейсов
Решение кейсов Мир без интернета (8 класс)
Мир без интернета (8 класс) Доказательства эволюции
Доказательства эволюции Использование различных логопедических технологий при построении коррекционной работы с заикающимися дошкольниками
Использование различных логопедических технологий при построении коррекционной работы с заикающимися дошкольниками материалы к КОНКУРСУ НА ПОЛУЧЕНИЕ ДЕНЕЖНОГО ПООЩРЕНИЯ
материалы к КОНКУРСУ НА ПОЛУЧЕНИЕ ДЕНЕЖНОГО ПООЩРЕНИЯ Marketing_uslug_Razrabotka_PO_pod_zakaz_1
Marketing_uslug_Razrabotka_PO_pod_zakaz_1 Бухгалтерская (финансовая) отчетность организаций
Бухгалтерская (финансовая) отчетность организаций Валовой внутренний продукт и другие показатели дохода и продукта
Валовой внутренний продукт и другие показатели дохода и продукта презентация 300-летие основания Нижегородской губернии
презентация 300-летие основания Нижегородской губернии Муфты. Назначение и классификация
Муфты. Назначение и классификация Мотель как новый тип гостиничного предприятия
Мотель как новый тип гостиничного предприятия Презентация ИКТ на уроках в начальной школе.
Презентация ИКТ на уроках в начальной школе. Все начинается с любви…
Все начинается с любви… Основы педагогического мастерства и Формирование информационной компетентности участников образовательного процесса
Основы педагогического мастерства и Формирование информационной компетентности участников образовательного процесса Новогодние программы от Арктур Шоу. 10 лет мы вместе с вами! А теперь и в Сочи!
Новогодние программы от Арктур Шоу. 10 лет мы вместе с вами! А теперь и в Сочи! Современные и натуральные интерьеры
Современные и натуральные интерьеры Эксплуатация насосных станций. Аппроксимация характеристик насосов магистральных нефтепроводов
Эксплуатация насосных станций. Аппроксимация характеристик насосов магистральных нефтепроводов Гуманная педагогика в деятельности учителя начальных классов
Гуманная педагогика в деятельности учителя начальных классов Родительское собрание Как воспитать любовь к чтению
Родительское собрание Как воспитать любовь к чтению Федеральное государственное бюджетное учреждение науки. Центр информационных технологий в проектировании РАН
Федеральное государственное бюджетное учреждение науки. Центр информационных технологий в проектировании РАН Информационно-коммуникативные технологии как средство формирования проектно-исследовательских компетенций обучающихся
Информационно-коммуникативные технологии как средство формирования проектно-исследовательских компетенций обучающихся Оформление презентации ВКР (консультация)
Оформление презентации ВКР (консультация) Индивидуальный календарь прививок для ребенка, который не имеет вакцины в соответствии с возрастом
Индивидуальный календарь прививок для ребенка, который не имеет вакцины в соответствии с возрастом