- Микроконтроллеры. Платформа Arduino. UNO элементы ТАУ, потенциометр, транзистор, ШИМ

Содержание
- 2. Элементы теории автоматического управления Для описания динамического поведения ЭЭС наиболее широкое применение нашли два основных подхода:
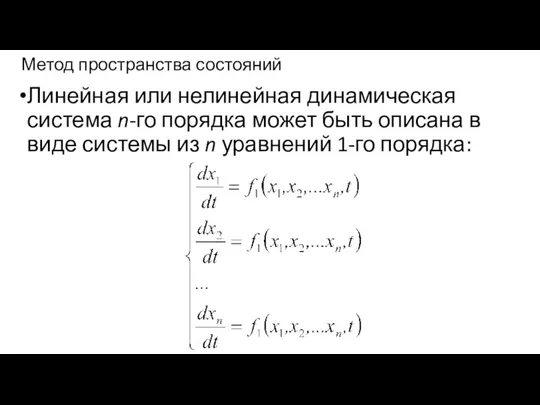
- 3. Метод пространства состояний Линейная или нелинейная динамическая система n-го порядка может быть описана в виде системы
- 4. Метод пространства состояний. Модель движения маятника
- 5. Метод пространства состояний. Модель станция – шины бесконечной мощности (ШБМ)
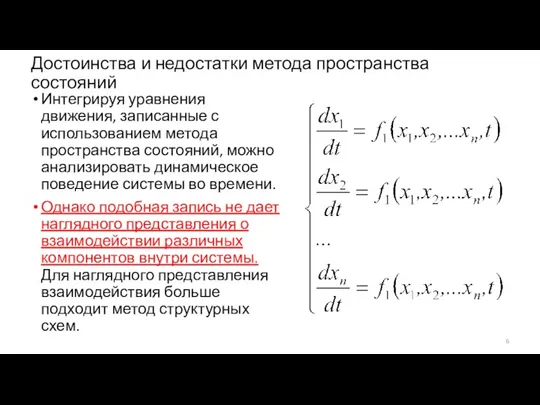
- 6. Достоинства и недостатки метода пространства состояний Интегрируя уравнения движения, записанные с использованием метода пространства состояний, можно
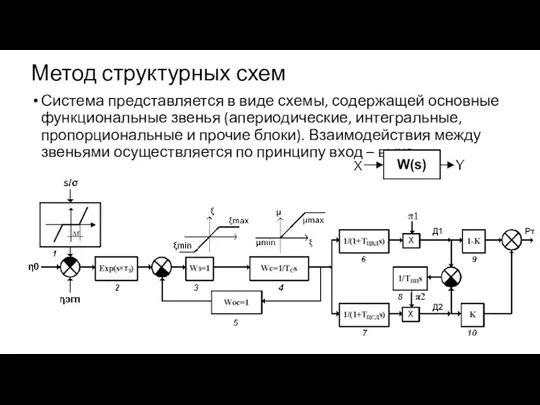
- 7. Метод структурных схем Система представляется в виде схемы, содержащей основные функциональные звенья (апериодические, интегральные, пропорциональные и
- 8. Метод структурных схем. Типовые звенья.
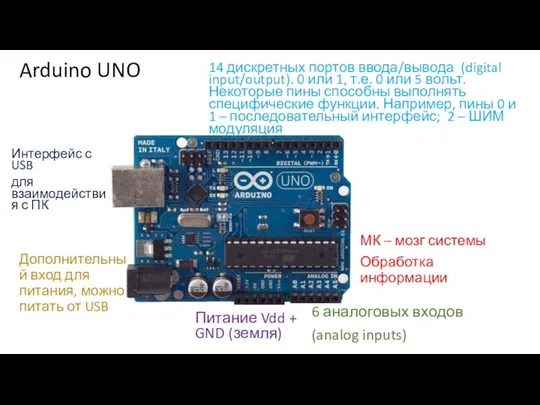
- 9. Arduino UNO 14 дискретных портов ввода/вывода (digital input/output). 0 или 1, т.е. 0 или 5 вольт.
- 10. Без «железа». 123D CIRCUITS https://123d.circuits.io/
- 11. Потенциометр
- 12. Потенциометр = варистор (переменное сопротивление) Поворот регулятора позволяет выставить необходимое соотношение сопротивлений. Чаще всего потенциометр используют
- 13. Транзисторы Транзистор – устройство, которое может усиливать входной сигнал по мощности. Увеличение мощности происходит за счет
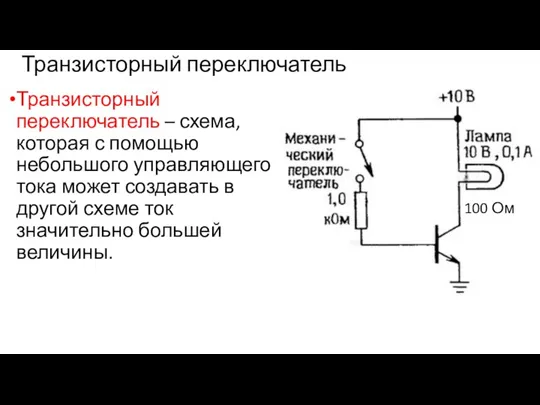
- 14. Транзисторный переключатель Транзисторный переключатель – схема, которая с помощью небольшого управляющего тока может создавать в другой
- 15. Транзисторный переключатель Переключатель разомкнут. Ток базы отсутствует, следовательно, отсутствует и ток коллектора: Iк=h*Iб= h*0=0. Переключатель замкнут.
- 16. Транзисторный переключатель. Пример. R=1 кОм R=1кОм
- 17. Транзисторный переключатель. Пример. R=10 Ом R=10 Ом Незначительный ток базы (порядка 5 мА) может коммутировать в
- 18. Зачем нам все это? Дискретные выходы Arduino UNO рассчитаны на максимальный ток в 40мА. Этого достаточно
- 19. ШИМ широтно-импульсная модуляция Широтно-импульсная модуляция (PWM pulse-width modulation) – управление средним значением напряжения на нагрузке путем
- 20. ШИМ широтно-импульсная модуляция. Принцип. Uоп – опорное (пилообразное, треугольное) напряжение; Uупр – модулирующее напряжение (например постоянное
- 21. ШИМ широтно-импульсная модуляция. Принцип. В общем случае модулирующее напряжение может быть произвольной формы. Синусоидальное модулирующее напряжение
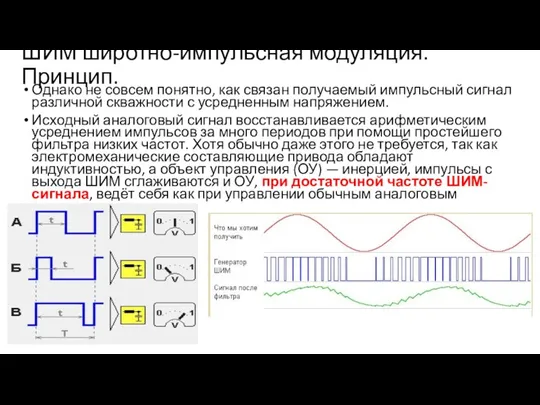
- 22. ШИМ широтно-импульсная модуляция. Принцип. Однако не совсем понятно, как связан получаемый импульсный сигнал различной скважности с
- 23. Зависимость напряжения от скважности ШИМ
- 24. Реализация ШИМ на Arduino UNO 6 из 14 цифровых (дискретных) входов/выходов Arduino UNO могут использоваться как
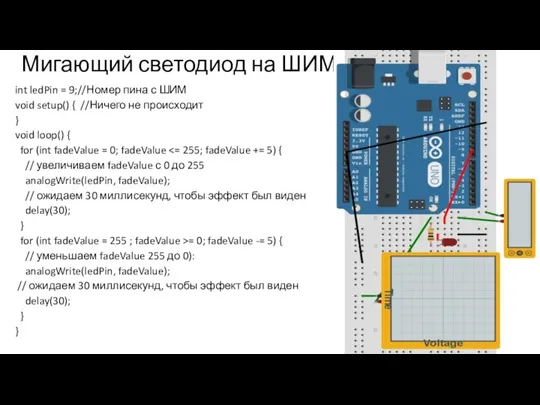
- 25. Мигающий светодиод на ШИМ int ledPin = 9;//Номер пина с ШИМ void setup() { //Ничего не
- 26. Мигающий светодиод на ШИМ
- 27. Мигающий светодиод на ШИМ
- 29. Скачать презентацию
Элементы теории автоматического управления
Для описания динамического поведения ЭЭС наиболее широкое применение
Элементы теории автоматического управления
Для описания динамического поведения ЭЭС наиболее широкое применение
Метод пространства состояний
Линейная или нелинейная динамическая система n-го порядка может быть
Метод пространства состояний
Линейная или нелинейная динамическая система n-го порядка может быть
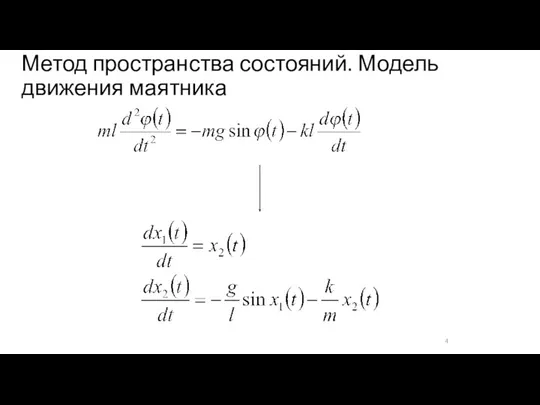
Метод пространства состояний. Модель движения маятника
Метод пространства состояний. Модель движения маятника
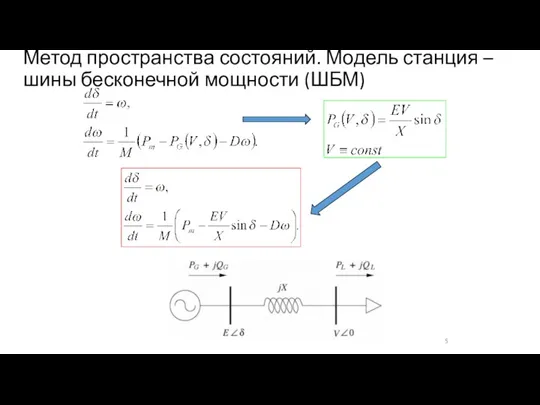
Метод пространства состояний. Модель станция – шины бесконечной мощности (ШБМ)
Метод пространства состояний. Модель станция – шины бесконечной мощности (ШБМ)
Достоинства и недостатки метода пространства состояний
Интегрируя уравнения движения, записанные с использованием
Достоинства и недостатки метода пространства состояний
Интегрируя уравнения движения, записанные с использованием
Метод структурных схем
Система представляется в виде схемы, содержащей основные функциональные звенья
Метод структурных схем
Система представляется в виде схемы, содержащей основные функциональные звенья
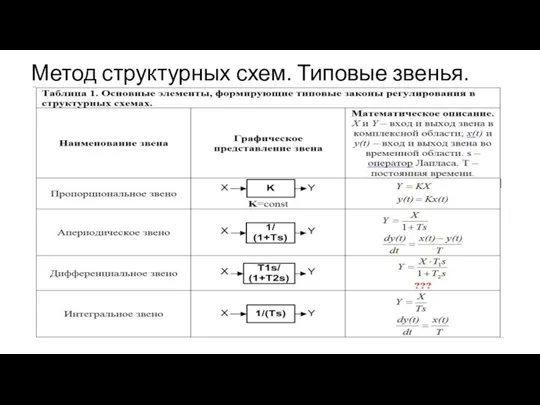
Метод структурных схем. Типовые звенья.
Метод структурных схем. Типовые звенья.
Arduino UNO
14 дискретных портов ввода/вывода (digital input/output). 0 или 1, т.е.
Arduino UNO
14 дискретных портов ввода/вывода (digital input/output). 0 или 1, т.е.
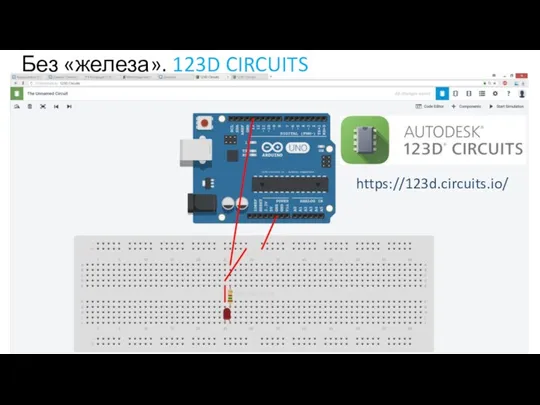
Без «железа». 123D CIRCUITS
https://123d.circuits.io/
Без «железа». 123D CIRCUITS
https://123d.circuits.io/
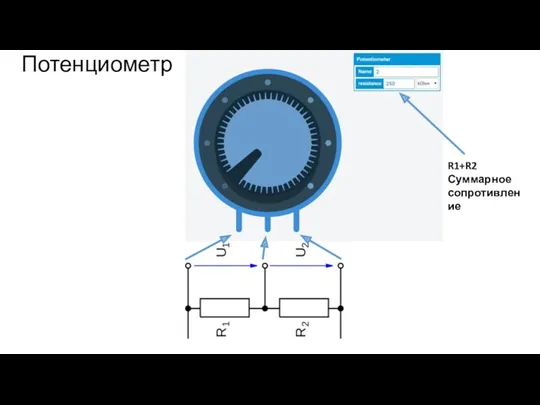
Потенциометр
Потенциометр
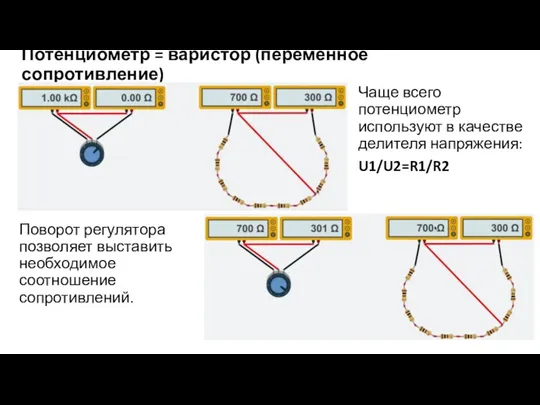
Потенциометр = варистор (переменное сопротивление)
Поворот регулятора позволяет выставить необходимое соотношение сопротивлений.
Потенциометр = варистор (переменное сопротивление)
Поворот регулятора позволяет выставить необходимое соотношение сопротивлений.
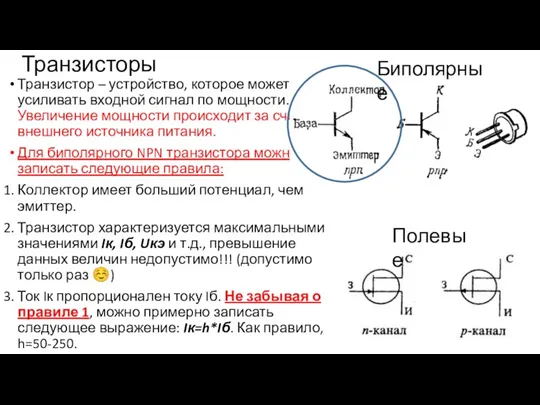
Транзисторы
Транзистор – устройство, которое может усиливать входной сигнал по мощности. Увеличение
Транзисторы
Транзистор – устройство, которое может усиливать входной сигнал по мощности. Увеличение
Транзисторный переключатель
Транзисторный переключатель – схема, которая с помощью небольшого управляющего тока
Транзисторный переключатель
Транзисторный переключатель – схема, которая с помощью небольшого управляющего тока
Транзисторный переключатель
Переключатель разомкнут. Ток базы отсутствует, следовательно, отсутствует и ток коллектора:
Транзисторный переключатель
Переключатель разомкнут. Ток базы отсутствует, следовательно, отсутствует и ток коллектора:
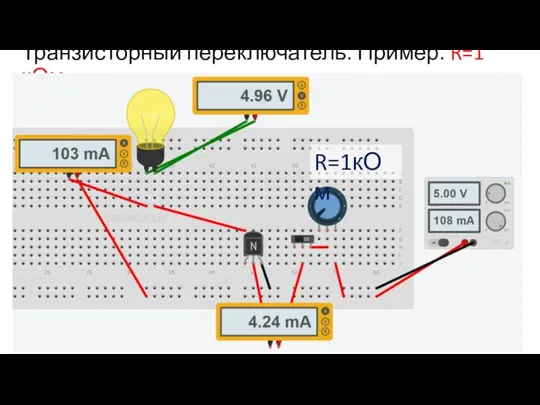
Транзисторный переключатель. Пример. R=1 кОм
R=1кОм
Транзисторный переключатель. Пример. R=1 кОм
R=1кОм
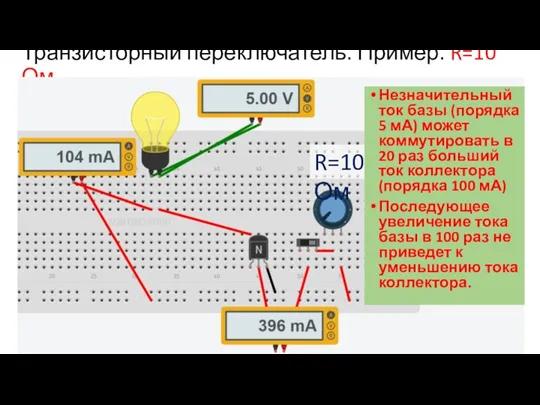
Транзисторный переключатель. Пример. R=10 Ом
R=10 Ом
Незначительный ток базы (порядка 5 мА)
Транзисторный переключатель. Пример. R=10 Ом
R=10 Ом
Незначительный ток базы (порядка 5 мА)
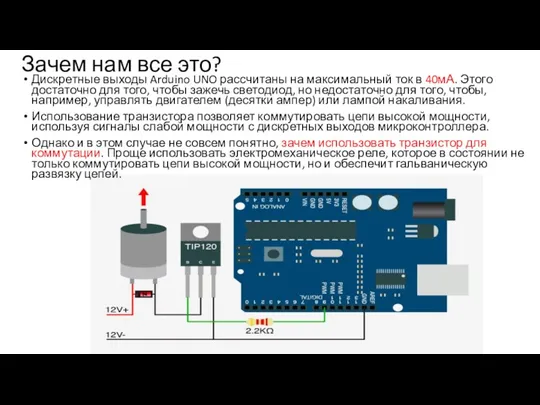
Зачем нам все это?
Дискретные выходы Arduino UNO рассчитаны на максимальный ток
Зачем нам все это?
Дискретные выходы Arduino UNO рассчитаны на максимальный ток
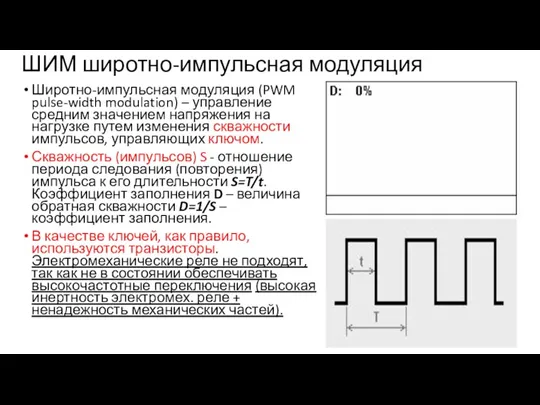
ШИМ широтно-импульсная модуляция
Широтно-импульсная модуляция (PWM pulse-width modulation) – управление средним значением
ШИМ широтно-импульсная модуляция
Широтно-импульсная модуляция (PWM pulse-width modulation) – управление средним значением
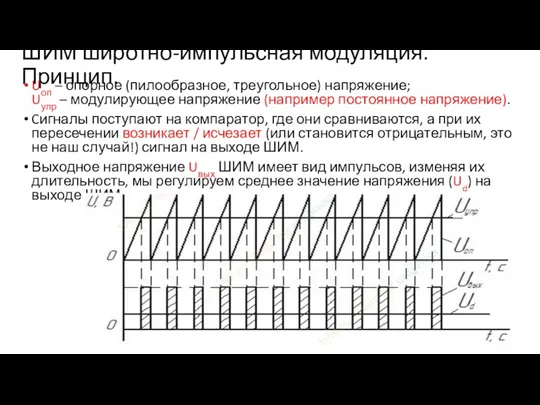
ШИМ широтно-импульсная модуляция. Принцип.
Uоп – опорное (пилообразное, треугольное) напряжение;
Uупр – модулирующее напряжение (например
ШИМ широтно-импульсная модуляция. Принцип.
Uоп – опорное (пилообразное, треугольное) напряжение; Uупр – модулирующее напряжение (например
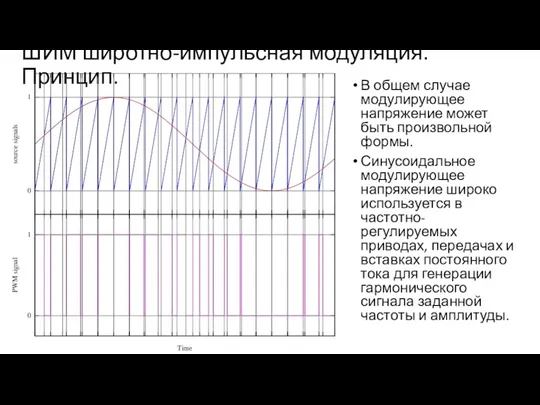
ШИМ широтно-импульсная модуляция. Принцип.
В общем случае модулирующее напряжение может быть произвольной
ШИМ широтно-импульсная модуляция. Принцип.
В общем случае модулирующее напряжение может быть произвольной
ШИМ широтно-импульсная модуляция. Принцип.
Однако не совсем понятно, как связан получаемый импульсный
ШИМ широтно-импульсная модуляция. Принцип.
Однако не совсем понятно, как связан получаемый импульсный
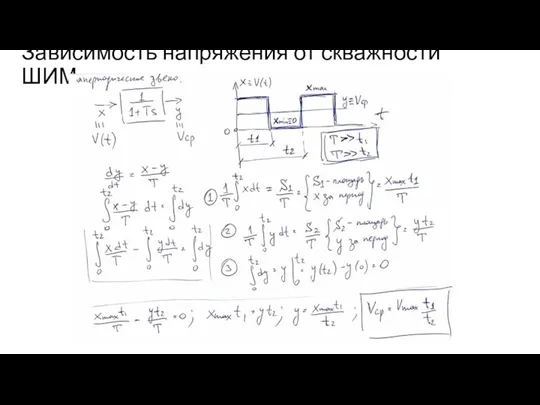
Зависимость напряжения от скважности ШИМ
Зависимость напряжения от скважности ШИМ

Реализация ШИМ на Arduino UNO
6 из 14 цифровых (дискретных) входов/выходов Arduino
Реализация ШИМ на Arduino UNO
6 из 14 цифровых (дискретных) входов/выходов Arduino
Мигающий светодиод на ШИМ
int ledPin = 9;//Номер пина с ШИМ
void setup()
Мигающий светодиод на ШИМ
int ledPin = 9;//Номер пина с ШИМ
void setup()
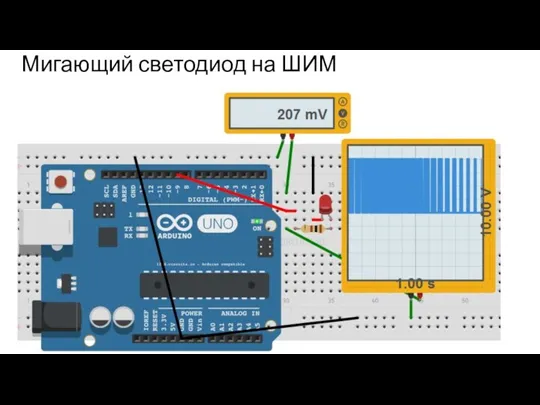
Мигающий светодиод на ШИМ
Мигающий светодиод на ШИМ
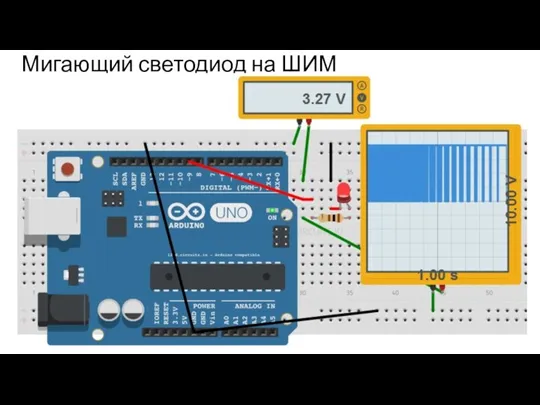
Мигающий светодиод на ШИМ
Мигающий светодиод на ШИМ
 Электромонтажные и сборочные технологии
Электромонтажные и сборочные технологии Приборы в гидравлике
Приборы в гидравлике What English holidays do you know
What English holidays do you know Состав сооружений континентального шельфа
Состав сооружений континентального шельфа Роль Европейского Севера в развитии русской культуры
Роль Европейского Севера в развитии русской культуры ВКР: Электрификация и автоматизация технологических процессов при строительстве станции Улица Новаторов
ВКР: Электрификация и автоматизация технологических процессов при строительстве станции Улица Новаторов Шедевры классицизма в архитектуре России
Шедевры классицизма в архитектуре России Нефтяная и газовая промышленность России
Нефтяная и газовая промышленность России Технические нормы и требования к проектированию и строительству железнодорожного электроснабжения ВСМ
Технические нормы и требования к проектированию и строительству железнодорожного электроснабжения ВСМ Модель сетевого взаимодействия МОУ в образовательном округе
Модель сетевого взаимодействия МОУ в образовательном округе Welding process
Welding process Приобщение детей дошкольного возраста к истокам русских народных традиций через театрализованную деятельность
Приобщение детей дошкольного возраста к истокам русских народных традиций через театрализованную деятельность Материал к конкурсу Учитель года Москвы - 2012
Материал к конкурсу Учитель года Москвы - 2012 Своя игра
Своя игра Масштаб карты
Масштаб карты Класифікація будівельних матеріалів
Класифікація будівельних матеріалів Строение человека. Органы дыхания
Строение человека. Органы дыхания Классическая школа управления. Основные последователи
Классическая школа управления. Основные последователи Воспитание с любовью
Воспитание с любовью Digital Design and Computer Architecture. Introdution
Digital Design and Computer Architecture. Introdution Профилактика травматизма
Профилактика травматизма Внедрение информационно-коммуникационных технологий в образование на уроках английского языка
Внедрение информационно-коммуникационных технологий в образование на уроках английского языка Медициналық қызмет көлемі және құрылысы
Медициналық қызмет көлемі және құрылысы Районный конкурс экологических проектов Влияние антропогенных загрязнений на здоровье человека Родному селу – нашу заботу
Районный конкурс экологических проектов Влияние антропогенных загрязнений на здоровье человека Родному селу – нашу заботу Военнослужащие и взаимоотношения между ними
Военнослужащие и взаимоотношения между ними Античность. Устные коммуникации
Античность. Устные коммуникации Прямоугольные треугольники
Прямоугольные треугольники Интерфейсы и протоколы цифровой передачи информации
Интерфейсы и протоколы цифровой передачи информации