- Микропроцессорные системы

Содержание
- 2. Литература Микропроцессоры: Учебное пособие для втузов. В 3 кн. Под ред. Преснухина Л.Н. –Минск: Высшая школа,
- 3. Основные понятия Микропроцессор (МП) - это функционально законченное программно-управляемое устройство обработки информации, выполненное в виде одной
- 4. Основные понятия Микропроцессорный комплект интегральных микросхем – совокупность микропроцессорных и других интегральных микросхем, совместимых по архитектуре,
- 5. Основные понятия Архитектура МП – функциональные возможности аппаратурных электронных средств МП, используемые для представления данных, машинных
- 6. Основные понятия Микропроцессорной системой (МП-системой) обычно называют специализированную информационную или управляющую систему, построенную на основе микропроцессорных
- 7. Основные понятия Интерфейс – совокупность правил, устанавливающих единые принципы взаимодействия устройств в микропроцессорной системе. В состав
- 8. Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем Современное устройство релейной защиты и автоматики (РЗА) представляет
- 9. Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем В качестве входной информации используются следующие составляющие: аналоговые
- 10. Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем входная двоичная дискретная информация, такая как, сигналы от
- 11. Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем управление уставками и параметрами устройств РЗА, осуществляемое обслуживающим
- 12. Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем цифровая информация к другим устройствам; сообщения различных видов
- 13. Основные сведения о микропроцессорах и микропроцессорных системах Основные преимущества микропроцессорных средств заключены в их универсальности, высокой
- 14. Основные сведения о микропроцессорах и микропроцессорных системах быстродействующие секционные комплекты микропроцессорных БИС для создания систем произвольной
- 15. Основные сведения о микропроцессорах и микропроцессорных системах процессоры цифровой обработки сигналов, подключаемые к стандартным интерфейсам микропроцессорных
- 16. Основные характеристики и типы МП Однокристальные МП с фиксированной разрядностью слова, с фиксированной системой команд и
- 17. Основные характеристики и типы МП Многокристальные (секционные) микро- программируемые МП с изменяемой разрядностью слова и фиксированным
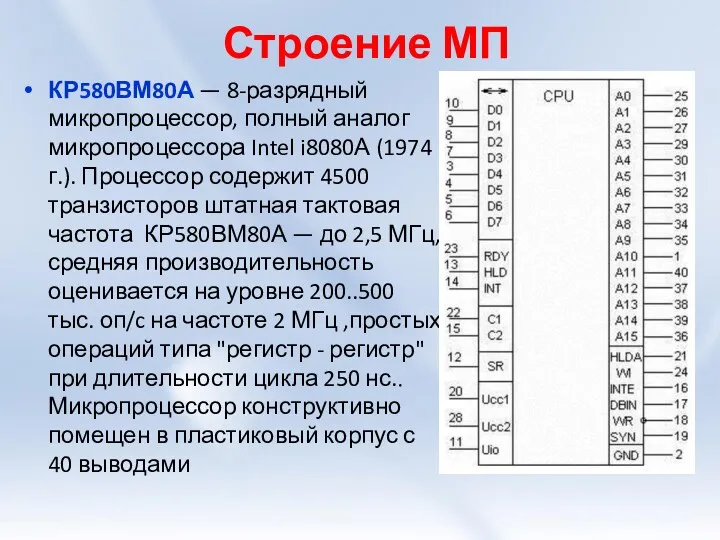
- 18. Строение МП КР580ВМ80А — 8-разрядный микропроцессор, полный аналог микропроцессора Intel i8080А (1974 г.). Процессор содержит 4500
- 19. Состав МПК КР580 Для формирования управляющих сигналов и буферирования данных в микропроцессорных системах на базе микропроцессора
- 20. Состав МПК КР580 Для связи микропроцессора с системной шиной применяют адресные регистры с повышенной нагрузочной способностью
- 21. Состав МПК КР580 Микросхема КР580ВВ55А – программируемое устройство ввода-вывода параллельной информации, применяется в качестве элемента ввода-вывода
- 22. Структурная схема микропроцессорной системы на основе микропроцессорного комплекта К580
- 23. Структура, организация микро ЭВМ Микропроцессор является основным компонентом любого микрокомпьютера или микро-ЭВМ. В основу построения микро-ЭВМ
- 24. Структура, организация микро ЭВМ Магистральность – это способ соединения между различными модулями компьютера, когда входные и
- 25. Структура, организация микро ЭВМ Современные ЭВМ могут иметь различную архитектуру, но обязательно содержат в своей структуре
- 26. Принципы фон Неймана Принцип программного управления обеспечивает автоматизацию процессов вычислений на ЭВМ. Согласно этому принципу программа
- 27. Принципы фон Неймана Принцип однородности памяти. Программы и данные хранятся в одной и той же памяти.
- 28. Принципы фон Неймана Принцип адресности. Структурно основная память состоит из пронумерованных ячеек; процессору в произвольный момент
- 29. Структура типового МП
- 30. Структура типового МП Шина данных (Data Bus) 8-ми разрядная, т.к. разрядность микропроцессора КР580ВМ80А равна 8-ми (D0-D7).
- 31. Структура типового МП Шина адреса (Address Bus), 16-ти разрядная (А0-А15), служит для определения адреса (номера) устройства,
- 32. Структура типового МП Шина управления (Control Bus), постоянной размерности не имеет, состоит из отдельных управляющих сигналов.
- 33. Структура типового МП ОЗУ хранит информацию только при наличии напряжения питания. ОЗУ-это простейший регистр построенный на
- 34. Структура типового МП Соединение всего многообразия внешних устройств с шинами МК осуществляется с помощью интерфейсов, которые
- 35. Структура типового МП Обмен данными с внешними устройствами осуществляется через порты ввода/вывода. Для микропроцессора Intel 8080
- 36. Микропроцессор Intel 8080A ориентирован на работу с памятью, имеющую байтовую организацию (8 бит). Это значит, что
- 37. Схема подключения выводов микропроцессора КР580ВМ80А и их назначения.
- 38. Выводы синхронизации: F1, F2 – выводы двух неперекрывающихся последовательностей синхроимпульсов; SYNC – выход синхронизации, сигнал определяет
- 39. Выводы управления ожиданием: READY – готово внешнее устройство (READY = 1) или не готово (READY =
- 40. Выводы управления памятью: WR – управление записью в память или во внешние устройства; низкий уровень указывает,
- 41. Выводы управления магистралью данных: DBIN – указывает, что магистраль данных (D7-D0) находится в режиме приема. Используется
- 42. Выводы управления прерыванием: INT – запрос прерывания внешним устройством, запрашивающих обмен с процессором в режиме прерывания.
- 43. Выводы управления захватом магистралей в режиме ПДП: HLD – вход запроса захвата магистралей D7-D0 и магистрали
- 44. Командный цикл микропроцессора Выполнение команд в МП осуществляется в строго определенной последовательности обусловленной рядом факторов, в
- 45. Машинные циклы и их идентификация Действия МПС по передаче в/из МП одного байта данных/команды называются машинным
- 46. МЦ микропроцессора i8080 предусматривает возможность обмена как в синхронном, так и в асинхронном режиме. Если в
- 47. Принципы программирования микропроцессоров. Все языки программирования условно можно разделить на три уровня: машинный код; автокод (язык
- 48. Ассемблерная мнемоника Язык ассемблера - это символическое представление машинного языка. Все процессы в машине на самом
- 49. Структурная схема микропроцессора КР580ВМ80А (i8080А)
- 51. Микропроцессор КР580ВМ80А реализован на основе общей внутренней магистрали данных и включает в себя следующие функциональные узлы:
- 52. Блок регистров Содержит шесть 16-ти битовых регистров, образующих статическую память с произвольным доступом (регистр – пространство
- 53. При выполнении арифметических и логических операций с регистровой адресацией в регистрах хранятся 8-ми разрядные операнды, которые
- 54. Регистр-счетчик (РС) Используется в качестве программного счетчика и хранит адрес текущей команды программы. Его содержимое автоматически
- 55. Указатель стека (SP) SP хранит адрес ячейки стековой области памяти, к которой было сделано последнее обращение.
- 56. Пара регистров W и Z Это 8-разрядные регистры. Они недоступны программисту. Используются для запоминания двухбайтовых и
- 57. Адресная логика предназначена для хранения, программного изменения и выдачи на магистраль А15-А0 адресов данных и команду.
- 58. Блок АЛУ. Предназначен для выполнения арифметических и логических операций над числами в параллельном 8-ми разрядном двоичном
- 59. Регистр флагов F 8 разрядный регистр, содержащий информацию о текущем состоянии микропроцессора. Имеет пять однобитовых флагов
- 60. Двунаправленная магистраль данных Служит для организации связи микропроцессора с другими микросхемами, входящими в состав микро-ЭВМ. Она
- 61. В режиме вывода информация с внутренней магистрали загружается в буферный регистр, а затем передается на внешнюю
- 62. Блок управления и синхронизации Предназначен для приема команд, синхронизирующих и управляющих внешних сигналов, а также для
- 63. Способы адресации микропроцессора Микропроцессор I8080/8085 использует пять способов адресации: неявную, регистровую, непосредственную, прямую, косвенную регистровую. Неявная
- 64. Регистровая адресация Когда используются команды с этим способом адресации, операция и источник данных (операнд) точно определены.
- 65. Непосредственная адресация Команды непосредственной адресации являются командами, по которым данные следуют непосредственно за командой. Прямая адресация
- 66. Косвенная регистровая адресация. Команды с такой адресацией обращаются в память, используя содержимое пары регистров для указания
- 67. Основные группы операций. Микропроцессоры выполняют набор команд, которые реализуют следующие основные группы операций: операции пересылки, арифметические
- 68. Команды ветвлений и переходов микропроцессора Intel 8080 Команды ветвлений содержат группы команд перехода, вызова, возврата и
- 69. Условия: JNZ – не нуль(Z = 0) JZ – нуль(Z = 1) JNC – нет переноса(CY
- 70. Команды стека, ввода/вывода и управления микропроцессором Intel 8080А Эти команды выполняют операции помещения в стек и
- 71. Рассмотрим более подробно операцию
- 72. Слово-состояние процессора МП КР580ВМ80А (I8080) имеет 10 типов машинных циклов, представленных в таблице 1, и все
- 73. Структура слово-состояния:
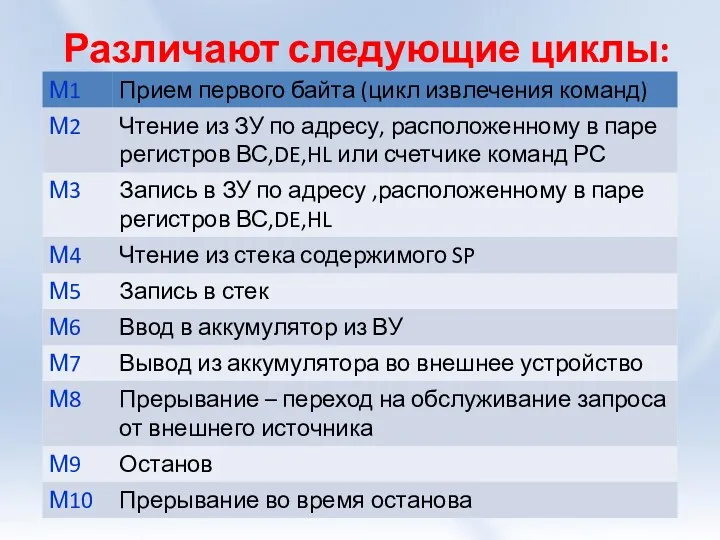
- 74. Различают следующие циклы:
- 75. Виды машинных циклов микропроцессора i8080А
- 76. Все множество допустимых циклов условно можно разбить на три группы: чтения (ввода) - М1, М2, М4,
- 77. Временные диаграммы работы микропроцессора в цикле М1 (цикл извлечения команды)
- 78. Цикл извлечения команды В первом такте Т1 по переднему фронту F2 на выходе SYNC микропроцессора появляется
- 79. Во втором такте Т2 на выходе микропроцессора DBIN появляется сигнал высокого уровня длительностью в один такт,
- 80. В такте Т3 может выполняться или завершаться чтение памяти, после чего шина данных DB переходит в
- 81. В четвертом такте Т4 код команды, поступивший в регистр команд дешифрируется - определяется , сколько циклов
- 82. Построение модуля центрального процессора (МЦП) на основе микропроцессора КР580ВМ80А Для построения модуля центрального процессора (МЦП) на
- 83. схема формирования сигналов управления чтением памяти (/MEMR), записи в память (/MEMW), чтения порта ввода/вывода (/IOR), записи
- 84. Схема синхронизации центрального процессора. Системный генератор КР580ГФ24 (Intel 8224) Схема синхронизации предназначена для формирования двух последовательностей
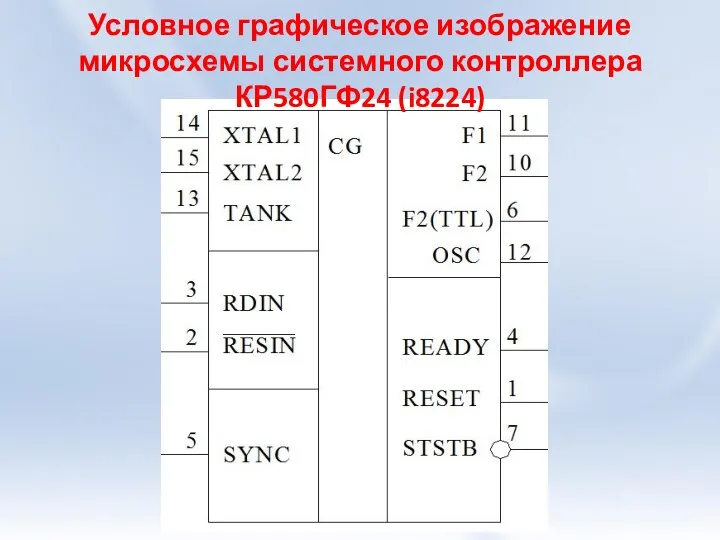
- 85. Условное графическое изображение микросхемы системного контроллера КР580ГФ24 (i8224)
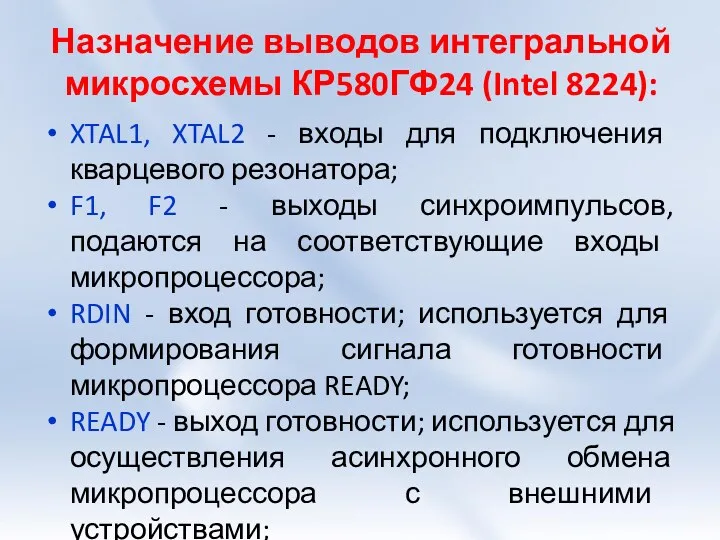
- 86. Назначение выводов интегральной микросхемы КР580ГФ24 (Intel 8224): XTAL1, XTAL2 - входы для подключения кварцевого резонатора; F1,
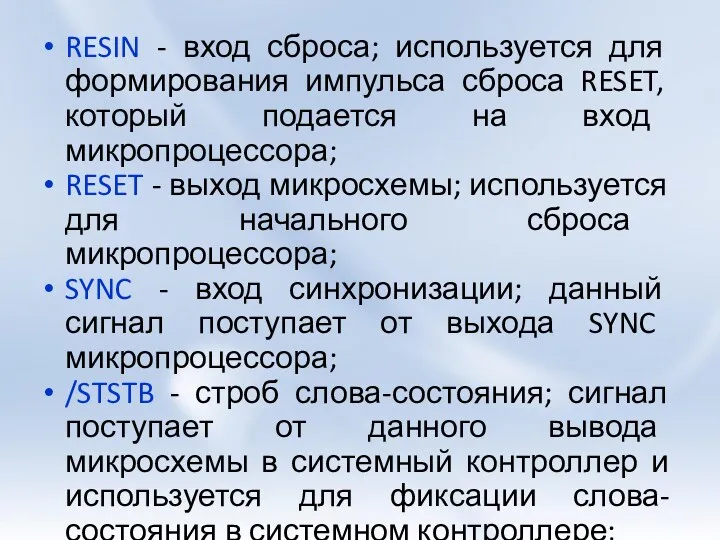
- 87. RESIN - вход сброса; используется для формирования импульса сброса RESET, который подается на вход микропроцессора; RESET
- 88. F2ТТЛ - выход; вторая синхросерия F2; (сопрягается с ТТЛ-логикой); TANK - используется для задания тактовой частоты
- 89. Для выполнения указанных функций в состав микропроцессорного комплекта входит синхронизированная интегральная схема системного генератора КР580ГФ24 (Intel
- 90. Как генератор, вырабатывающий сигналы начальной установки микропроцессора RESET и сигнал готовности микропроцессора READY, которые синхронизированы тактовыми
- 91. Подключение микросхемы КР580ГФ24 / Intel 8224 к микропроцессору КР580ВМ80А
- 92. Системный контроллер КР580ВК28 /38 (Intel 8228/38) Системный контроллер КР580ВК28 (38) / Intel 8228 (38) предназначен для:
- 93. Обозначение микросхемы КР580ВК28 /38 ( Intel 8228/38)
- 94. Подключение выводов КР580ВК28 /38
- 95. Выводов КР580ВК28 /38
- 96. Параллельный программируемый интерфейс i8255 (КР580ВВ55) Для организации обмена информации МП системы с внешними периферийными устройствами в
- 97. Параллельный программируемый интерфейс i8255 (КР580ВВ55) В ППИ КР580ВВ55 входит схема управления выводом, вводом и двунаправленный буфер
- 98. ППИ и его подключение к микропроцессорной системе
- 99. Назначение выводов ППИ
- 100. Программируемый интервальный таймер БИС КР580ВИ53 Программируемый интервальный таймер БИС i8253 используется для задания временных интервалов в
- 101. Графическое изображение микросхемы КР580ВИ53
- 102. Назначение выводов КР580ВИ53
- 103. Программируемый контроллер прерываний i8259 Для организации прерываний в микропроцессорной системе существует специальная БИС - контроллер прерываний
- 104. Программируемый контроллер прерываний i8259 фиксацию запросов на прерывание от 8 внешних источников; программное маскирование поступающих запросов;
- 105. Условное изображение программируемого контроллера прерываний.
- 106. Назначение выводов D0 - D7 - Двунаправленные выводы с импедансным состоянием, подключаются к шине данных системы
- 108. Скачать презентацию
Литература
Микропроцессоры: Учебное пособие для втузов. В 3 кн. Под ред. Преснухина
Литература
Микропроцессоры: Учебное пособие для втузов. В 3 кн. Под ред. Преснухина
Основные понятия
Микропроцессор (МП) - это функционально законченное программно-управляемое устройство обработки
Основные понятия
Микропроцессор (МП) - это функционально законченное программно-управляемое устройство обработки
Основные понятия
Микропроцессорный комплект интегральных микросхем – совокупность микропроцессорных и других интегральных
Основные понятия
Микропроцессорный комплект интегральных микросхем – совокупность микропроцессорных и других интегральных
Основные понятия
Архитектура МП – функциональные возможности аппаратурных электронных средств МП, используемые
Основные понятия
Архитектура МП – функциональные возможности аппаратурных электронных средств МП, используемые
Основные понятия
Микропроцессорной системой (МП-системой) обычно называют специализированную информационную или управляющую систему,
Основные понятия
Микропроцессорной системой (МП-системой) обычно называют специализированную информационную или управляющую систему,
Основные понятия
Интерфейс – совокупность правил, устанавливающих единые принципы взаимодействия устройств в
Основные понятия
Интерфейс – совокупность правил, устанавливающих единые принципы взаимодействия устройств в
Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем
Современное устройство релейной защиты
Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем
Современное устройство релейной защиты
Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем
В качестве входной информации
Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем
В качестве входной информации
Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем
входная двоичная дискретная информация,
Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем
входная двоичная дискретная информация,
Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем
управление уставками и параметрами
Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем
управление уставками и параметрами
Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем
цифровая информация к другим
Микропроцессорные устройства релейной защиты и автоматики электроэнергетических систем
цифровая информация к другим
Основные сведения о
микропроцессорах и микропроцессорных системах
Основные преимущества микропроцессорных средств заключены
Основные сведения о
микропроцессорах и микропроцессорных системах
Основные преимущества микропроцессорных средств заключены
Основные сведения о
микропроцессорах и микропроцессорных системах
быстродействующие секционные комплекты микропроцессорных БИС
Основные сведения о
микропроцессорах и микропроцессорных системах
быстродействующие секционные комплекты микропроцессорных БИС
Основные сведения о
микропроцессорах и
микропроцессорных системах
процессоры цифровой обработки сигналов, подключаемые
Основные сведения о
микропроцессорах и
микропроцессорных системах
процессоры цифровой обработки сигналов, подключаемые
Основные характеристики
и типы МП
Однокристальные МП с фиксированной разрядностью слова, с
Основные характеристики
и типы МП
Однокристальные МП с фиксированной разрядностью слова, с
Основные характеристики
и типы МП
Многокристальные (секционные) микро- программируемые МП с изменяемой
Основные характеристики
и типы МП
Многокристальные (секционные) микро- программируемые МП с изменяемой
Строение МП
КР580ВМ80А — 8-разрядный микропроцессор, полный аналог микропроцессора Intel i8080А (1974 г.).
Строение МП
КР580ВМ80А — 8-разрядный микропроцессор, полный аналог микропроцессора Intel i8080А (1974 г.).
Состав МПК КР580
Для формирования управляющих сигналов и буферирования данных в микропроцессорных
Состав МПК КР580
Для формирования управляющих сигналов и буферирования данных в микропроцессорных
Состав МПК КР580
Для связи микропроцессора с системной шиной применяют адресные регистры
Состав МПК КР580
Для связи микропроцессора с системной шиной применяют адресные регистры
Состав МПК КР580
Микросхема КР580ВВ55А – программируемое устройство ввода-вывода параллельной информации, применяется
Состав МПК КР580
Микросхема КР580ВВ55А – программируемое устройство ввода-вывода параллельной информации, применяется

Структурная схема микропроцессорной системы на основе микропроцессорного комплекта К580
Структурная схема микропроцессорной системы на основе микропроцессорного комплекта К580
Структура, организация микро ЭВМ
Микропроцессор является основным компонентом любого микрокомпьютера или микро-ЭВМ.
В
Структура, организация микро ЭВМ
Микропроцессор является основным компонентом любого микрокомпьютера или микро-ЭВМ.
В
Структура, организация микро ЭВМ
Магистральность – это способ соединения между различными модулями
Структура, организация микро ЭВМ
Магистральность – это способ соединения между различными модулями
Структура, организация микро ЭВМ
Современные ЭВМ могут иметь различную архитектуру, но обязательно
Структура, организация микро ЭВМ
Современные ЭВМ могут иметь различную архитектуру, но обязательно
Принципы фон Неймана
Принцип программного управления обеспечивает автоматизацию процессов вычислений на ЭВМ.
Принципы фон Неймана
Принцип программного управления обеспечивает автоматизацию процессов вычислений на ЭВМ.
Принципы фон Неймана
Принцип однородности памяти. Программы и данные хранятся в одной
Принципы фон Неймана
Принцип однородности памяти. Программы и данные хранятся в одной
Принципы фон Неймана
Принцип адресности. Структурно основная память состоит из пронумерованных ячеек;
Принципы фон Неймана
Принцип адресности. Структурно основная память состоит из пронумерованных ячеек;
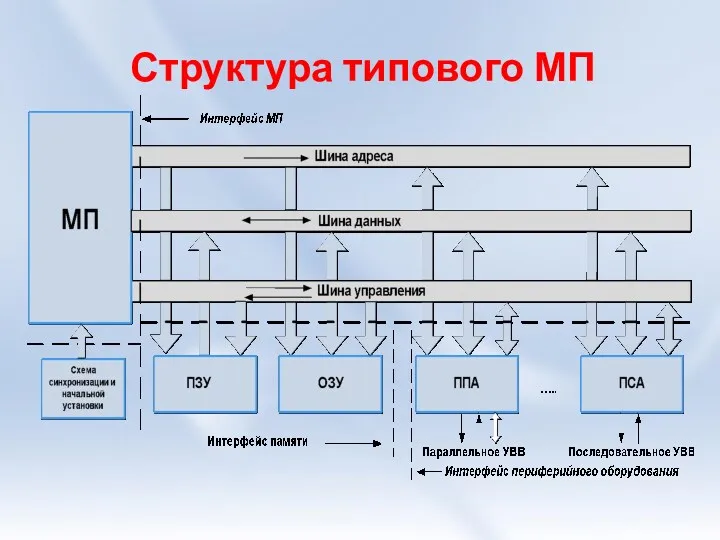
Структура типового МП
Структура типового МП
Структура типового МП
Шина данных (Data Bus) 8-ми разрядная, т.к. разрядность микропроцессора
Структура типового МП
Шина данных (Data Bus) 8-ми разрядная, т.к. разрядность микропроцессора
Структура типового МП
Шина адреса (Address Bus), 16-ти разрядная (А0-А15), служит для
Структура типового МП
Шина адреса (Address Bus), 16-ти разрядная (А0-А15), служит для
Структура типового МП
Шина управления (Control Bus), постоянной размерности не имеет, состоит
Структура типового МП
Шина управления (Control Bus), постоянной размерности не имеет, состоит
Структура типового МП
ОЗУ хранит информацию только при наличии напряжения питания. ОЗУ-это
Структура типового МП
ОЗУ хранит информацию только при наличии напряжения питания. ОЗУ-это
Структура типового МП
Соединение всего многообразия внешних устройств с шинами МК осуществляется
Структура типового МП
Соединение всего многообразия внешних устройств с шинами МК осуществляется
Структура типового МП
Обмен данными с внешними устройствами осуществляется через порты ввода/вывода.
Структура типового МП
Обмен данными с внешними устройствами осуществляется через порты ввода/вывода.
Микропроцессор Intel 8080A ориентирован на работу с памятью, имеющую байтовую организацию
Микропроцессор Intel 8080A ориентирован на работу с памятью, имеющую байтовую организацию
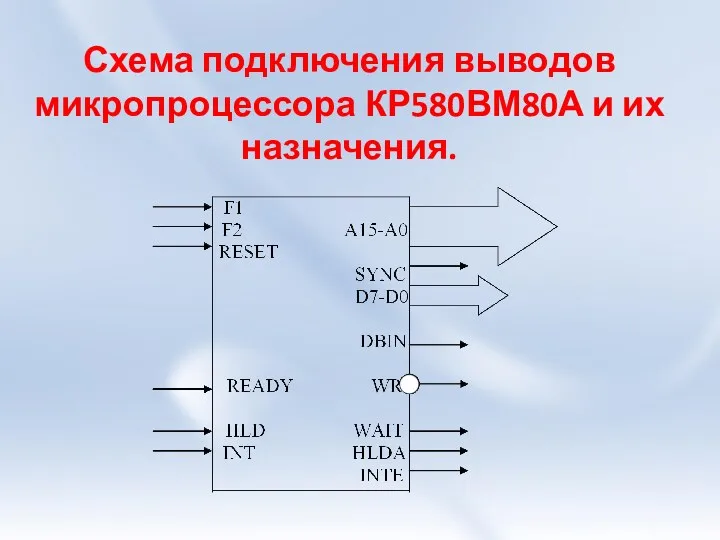
Схема подключения выводов микропроцессора КР580ВМ80А и их назначения.
Схема подключения выводов микропроцессора КР580ВМ80А и их назначения.
Выводы синхронизации:
F1, F2 – выводы двух неперекрывающихся последовательностей синхроимпульсов;
SYNC – выход
Выводы синхронизации:
F1, F2 – выводы двух неперекрывающихся последовательностей синхроимпульсов;
SYNC – выход
Выводы управления ожиданием:
READY – готово внешнее устройство (READY = 1) или
Выводы управления ожиданием:
READY – готово внешнее устройство (READY = 1) или
Выводы управления памятью:
WR – управление записью в память или во внешние
Выводы управления памятью:
WR – управление записью в память или во внешние
Выводы управления магистралью данных:
DBIN – указывает, что магистраль данных (D7-D0) находится
Выводы управления магистралью данных:
DBIN – указывает, что магистраль данных (D7-D0) находится
Выводы управления прерыванием:
INT – запрос прерывания внешним устройством, запрашивающих обмен с
Выводы управления прерыванием:
INT – запрос прерывания внешним устройством, запрашивающих обмен с
Выводы управления захватом магистралей в режиме ПДП:
HLD – вход запроса захвата
Выводы управления захватом магистралей в режиме ПДП:
HLD – вход запроса захвата
Командный цикл микропроцессора
Выполнение команд в МП осуществляется в строго определенной последовательности
Командный цикл микропроцессора
Выполнение команд в МП осуществляется в строго определенной последовательности
Машинные циклы и их идентификация
Действия МПС по передаче в/из МП одного
Машинные циклы и их идентификация
Действия МПС по передаче в/из МП одного
МЦ микропроцессора i8080 предусматривает возможность обмена как в синхронном, так и
МЦ микропроцессора i8080 предусматривает возможность обмена как в синхронном, так и
Принципы программирования микропроцессоров.
Все языки программирования условно можно разделить на три
Принципы программирования микропроцессоров.
Все языки программирования условно можно разделить на три
Ассемблерная мнемоника
Язык ассемблера - это символическое представление машинного языка. Все процессы
Ассемблерная мнемоника
Язык ассемблера - это символическое представление машинного языка. Все процессы
Структурная схема микропроцессора КР580ВМ80А (i8080А)
Структурная схема микропроцессора КР580ВМ80А (i8080А)
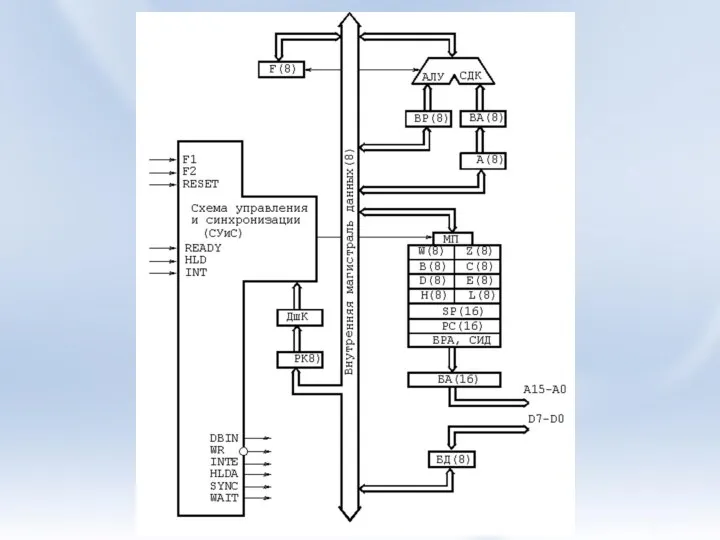
Микропроцессор КР580ВМ80А реализован на основе общей внутренней магистрали данных и включает
Микропроцессор КР580ВМ80А реализован на основе общей внутренней магистрали данных и включает

Блок регистров
Содержит шесть 16-ти битовых регистров, образующих статическую память с произвольным
Блок регистров
Содержит шесть 16-ти битовых регистров, образующих статическую память с произвольным
При выполнении арифметических и логических операций с регистровой адресацией в регистрах
При выполнении арифметических и логических операций с регистровой адресацией в регистрах
Регистр-счетчик (РС)
Используется в качестве программного счетчика и хранит адрес текущей команды
Регистр-счетчик (РС)
Используется в качестве программного счетчика и хранит адрес текущей команды
Указатель стека (SP)
SP хранит адрес ячейки стековой области памяти, к которой
Указатель стека (SP)
SP хранит адрес ячейки стековой области памяти, к которой
Пара регистров W и Z
Это 8-разрядные регистры. Они недоступны программисту. Используются
Пара регистров W и Z
Это 8-разрядные регистры. Они недоступны программисту. Используются
Адресная логика
предназначена для хранения, программного изменения и выдачи на магистраль А15-А0
Адресная логика
предназначена для хранения, программного изменения и выдачи на магистраль А15-А0
Блок АЛУ.
Предназначен для выполнения арифметических и логических операций над числами в
Блок АЛУ.
Предназначен для выполнения арифметических и логических операций над числами в
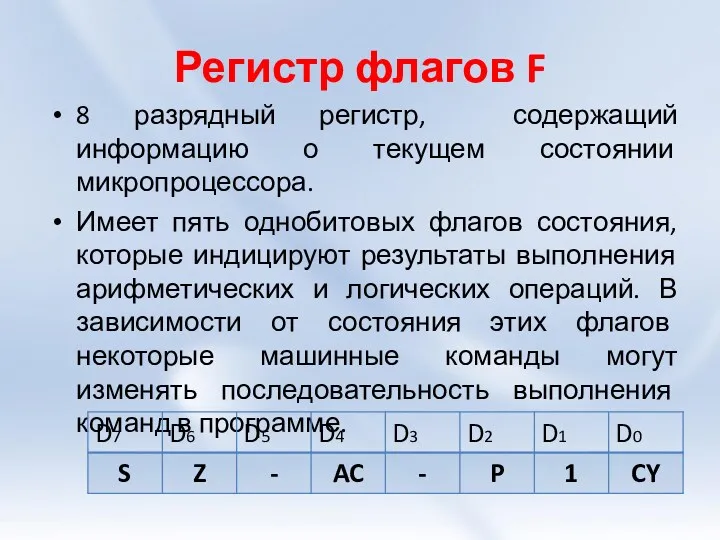
Регистр флагов F
8 разрядный регистр, содержащий информацию о текущем состоянии микропроцессора.
Регистр флагов F
8 разрядный регистр, содержащий информацию о текущем состоянии микропроцессора.
Двунаправленная магистраль данных
Служит для организации связи микропроцессора с другими микросхемами, входящими
Двунаправленная магистраль данных
Служит для организации связи микропроцессора с другими микросхемами, входящими
В режиме вывода информация с внутренней магистрали загружается в буферный регистр,
В режиме вывода информация с внутренней магистрали загружается в буферный регистр,
Блок управления и синхронизации
Предназначен для приема команд, синхронизирующих и управляющих внешних
Блок управления и синхронизации
Предназначен для приема команд, синхронизирующих и управляющих внешних
Способы адресации микропроцессора
Микропроцессор I8080/8085 использует пять способов адресации: неявную, регистровую, непосредственную,
Способы адресации микропроцессора
Микропроцессор I8080/8085 использует пять способов адресации: неявную, регистровую, непосредственную,
Регистровая адресация Когда используются команды с этим способом адресации, операция и
Регистровая адресация Когда используются команды с этим способом адресации, операция и
Непосредственная адресация Команды непосредственной адресации являются командами, по которым данные следуют
Непосредственная адресация Команды непосредственной адресации являются командами, по которым данные следуют

Косвенная регистровая адресация. Команды с такой адресацией обращаются в память, используя
Косвенная регистровая адресация. Команды с такой адресацией обращаются в память, используя
Основные группы операций.
Микропроцессоры выполняют набор команд, которые реализуют следующие основные группы
Основные группы операций.
Микропроцессоры выполняют набор команд, которые реализуют следующие основные группы
Команды ветвлений и переходов микропроцессора Intel 8080
Команды ветвлений содержат группы команд
Команды ветвлений и переходов микропроцессора Intel 8080
Команды ветвлений содержат группы команд
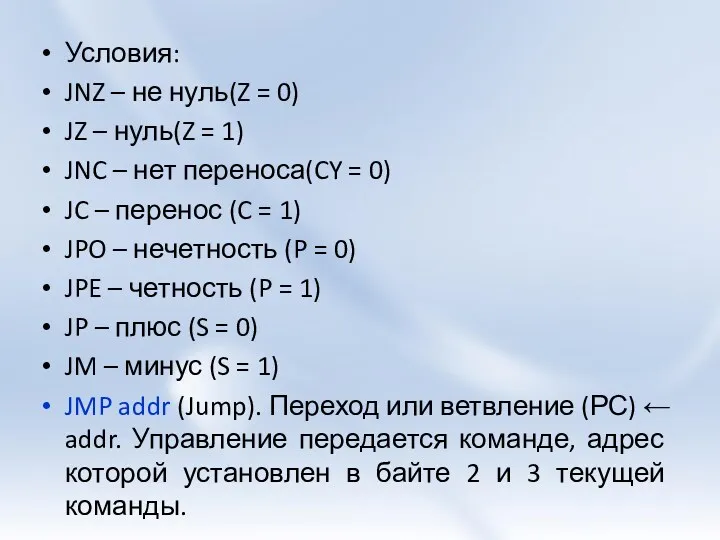
Условия:
JNZ – не нуль(Z = 0)
JZ – нуль(Z =
Условия:
JNZ – не нуль(Z = 0)
JZ – нуль(Z =
Команды стека, ввода/вывода и управления микропроцессором
Intel 8080А
Эти команды выполняют операции
Команды стека, ввода/вывода и управления микропроцессором
Intel 8080А
Эти команды выполняют операции
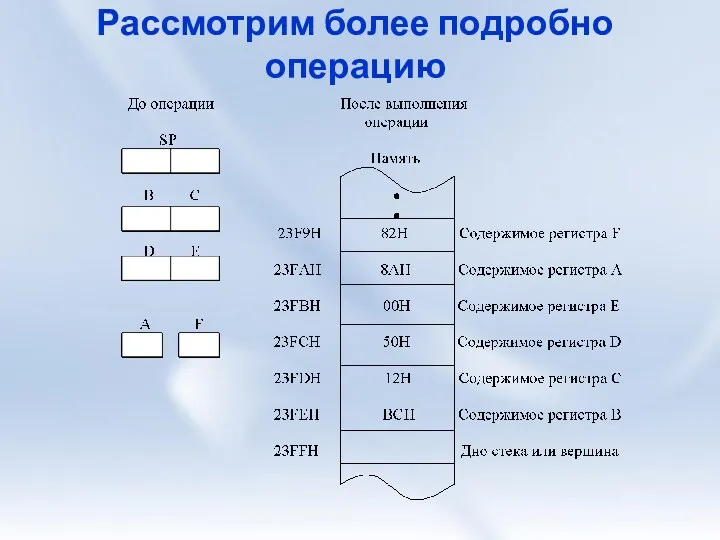
Рассмотрим более подробно операцию
Рассмотрим более подробно операцию
Слово-состояние процессора
МП КР580ВМ80А (I8080) имеет 10 типов машинных циклов,
Слово-состояние процессора
МП КР580ВМ80А (I8080) имеет 10 типов машинных циклов,

Структура слово-состояния:
Структура слово-состояния:
Различают следующие циклы:
Различают следующие циклы:

Виды машинных циклов микропроцессора i8080А
Виды машинных циклов микропроцессора i8080А
Все множество допустимых циклов условно можно разбить на три группы: чтения
Все множество допустимых циклов условно можно разбить на три группы: чтения
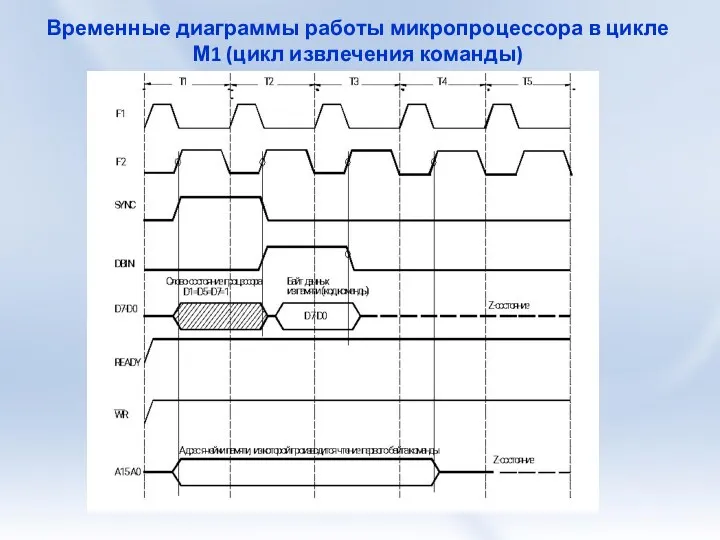
Временные диаграммы работы микропроцессора в цикле М1 (цикл извлечения команды)
Временные диаграммы работы микропроцессора в цикле М1 (цикл извлечения команды)
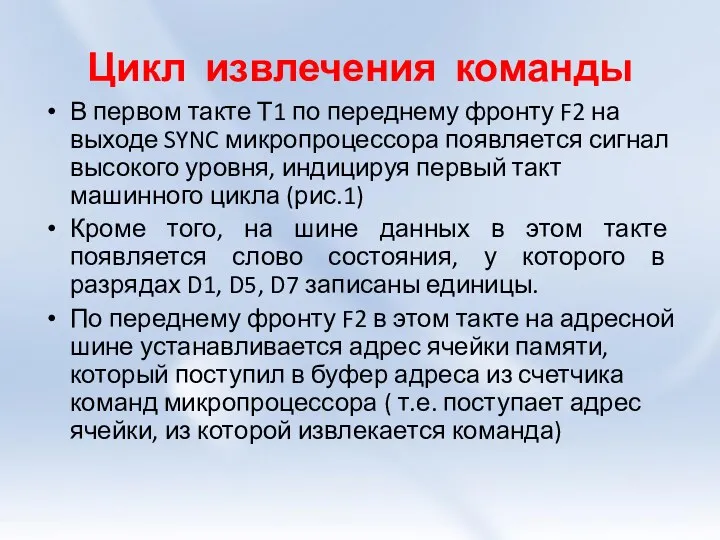
Цикл извлечения команды
В первом такте Т1 по переднему фронту F2
Цикл извлечения команды
В первом такте Т1 по переднему фронту F2
Во втором такте Т2 на выходе микропроцессора DBIN появляется сигнал высокого
Во втором такте Т2 на выходе микропроцессора DBIN появляется сигнал высокого
В такте Т3 может выполняться или завершаться чтение памяти, после чего
В такте Т3 может выполняться или завершаться чтение памяти, после чего
В четвертом такте Т4 код команды, поступивший в регистр команд дешифрируется
В четвертом такте Т4 код команды, поступивший в регистр команд дешифрируется
Построение модуля центрального процессора (МЦП) на основе микропроцессора КР580ВМ80А
Для построения модуля
Построение модуля центрального процессора (МЦП) на основе микропроцессора КР580ВМ80А
Для построения модуля
схема формирования сигналов управления чтением памяти (/MEMR), записи в память (/MEMW),
схема формирования сигналов управления чтением памяти (/MEMR), записи в память (/MEMW),

Схема синхронизации центрального процессора. Системный генератор КР580ГФ24 (Intel 8224)
Схема синхронизации
Схема синхронизации центрального процессора. Системный генератор КР580ГФ24 (Intel 8224)
Схема синхронизации
Условное графическое изображение микросхемы системного контроллера КР580ГФ24 (i8224)
Условное графическое изображение микросхемы системного контроллера КР580ГФ24 (i8224)
Назначение выводов интегральной микросхемы КР580ГФ24 (Intel 8224):
XTAL1, XTAL2 - входы для
Назначение выводов интегральной микросхемы КР580ГФ24 (Intel 8224):
XTAL1, XTAL2 - входы для
RESIN - вход сброса; используется для формирования импульса сброса RESET, который
RESIN - вход сброса; используется для формирования импульса сброса RESET, который
F2ТТЛ - выход; вторая синхросерия F2; (сопрягается с ТТЛ-логикой);
TANK - используется
F2ТТЛ - выход; вторая синхросерия F2; (сопрягается с ТТЛ-логикой);
TANK - используется
Для выполнения указанных функций в состав микропроцессорного комплекта входит синхронизированная интегральная
Для выполнения указанных функций в состав микропроцессорного комплекта входит синхронизированная интегральная
Как генератор, вырабатывающий сигналы начальной установки микропроцессора RESET и сигнал готовности
Как генератор, вырабатывающий сигналы начальной установки микропроцессора RESET и сигнал готовности

Подключение микросхемы КР580ГФ24 / Intel 8224 к микропроцессору КР580ВМ80А
Подключение микросхемы КР580ГФ24 / Intel 8224 к микропроцессору КР580ВМ80А
Системный контроллер КР580ВК28 /38 (Intel 8228/38)
Системный контроллер КР580ВК28 (38) / Intel
Системный контроллер КР580ВК28 /38 (Intel 8228/38)
Системный контроллер КР580ВК28 (38) / Intel

Обозначение микросхемы КР580ВК28 /38 ( Intel 8228/38)
Обозначение микросхемы КР580ВК28 /38 ( Intel 8228/38)
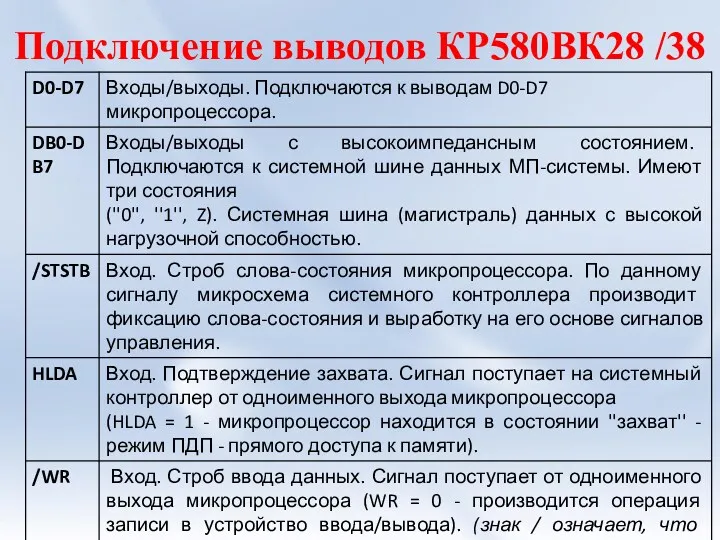
Подключение выводов КР580ВК28 /38
Подключение выводов КР580ВК28 /38
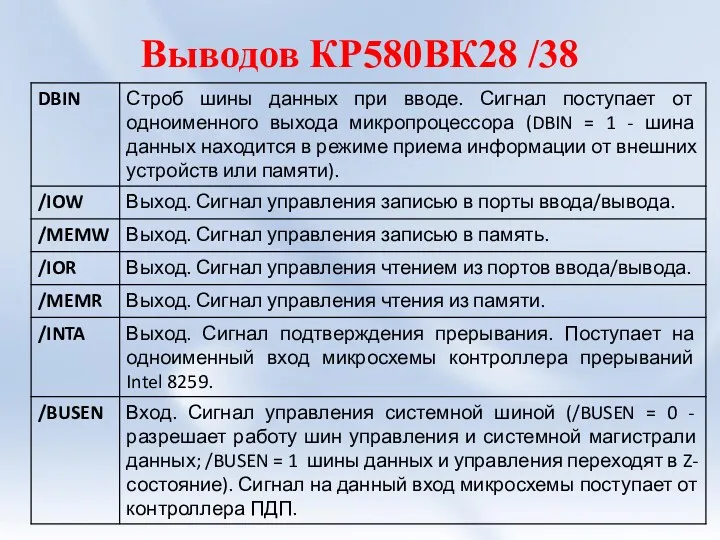
Выводов КР580ВК28 /38
Выводов КР580ВК28 /38
Параллельный программируемый интерфейс i8255 (КР580ВВ55)
Для организации обмена информации МП системы с
Параллельный программируемый интерфейс i8255 (КР580ВВ55)
Для организации обмена информации МП системы с
Параллельный программируемый интерфейс i8255 (КР580ВВ55)
В ППИ КР580ВВ55 входит схема управления выводом,
Параллельный программируемый интерфейс i8255 (КР580ВВ55)
В ППИ КР580ВВ55 входит схема управления выводом,

ППИ и его подключение к
микропроцессорной системе
ППИ и его подключение к
микропроцессорной системе
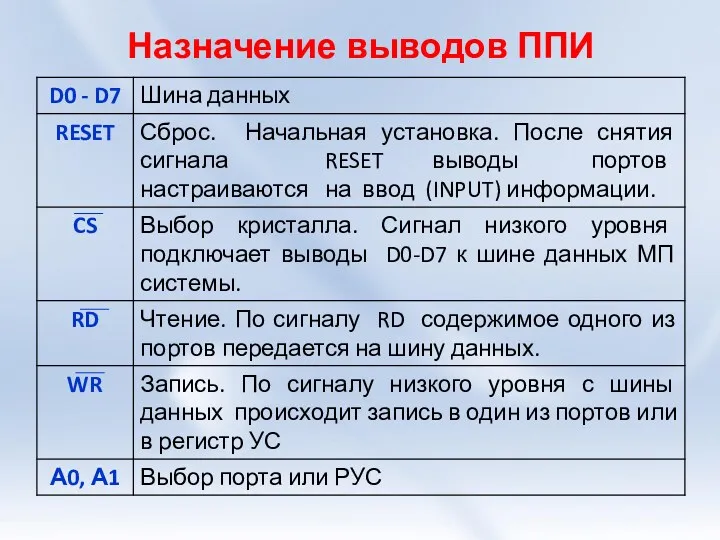
Назначение выводов ППИ
Назначение выводов ППИ
Программируемый интервальный таймер БИС КР580ВИ53
Программируемый интервальный таймер БИС i8253 используется для
Программируемый интервальный таймер БИС КР580ВИ53
Программируемый интервальный таймер БИС i8253 используется для
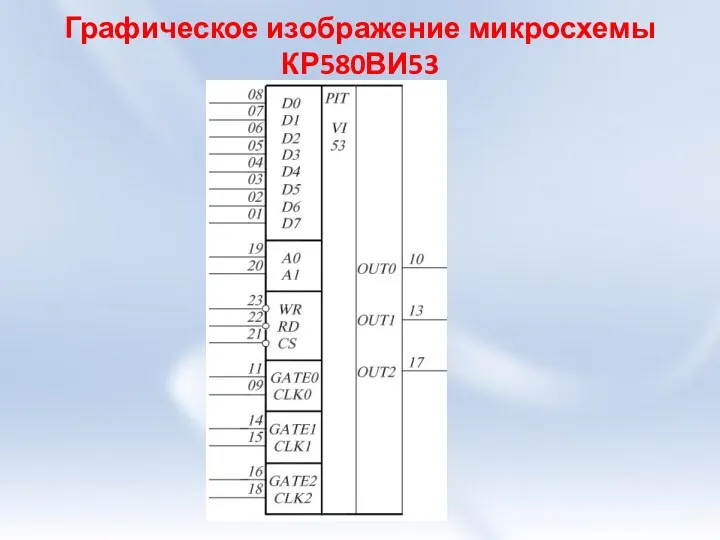
Графическое изображение микросхемы КР580ВИ53
Графическое изображение микросхемы КР580ВИ53
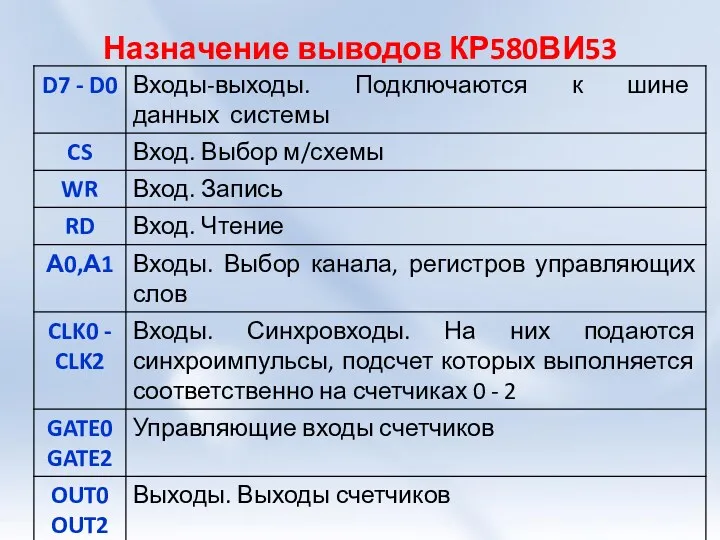
Назначение выводов КР580ВИ53
Назначение выводов КР580ВИ53
Программируемый контроллер прерываний i8259
Для организации прерываний в микропроцессорной системе существует
Программируемый контроллер прерываний i8259
Для организации прерываний в микропроцессорной системе существует
Программируемый контроллер прерываний i8259
фиксацию запросов на прерывание от 8 внешних источников;
Программируемый контроллер прерываний i8259
фиксацию запросов на прерывание от 8 внешних источников;
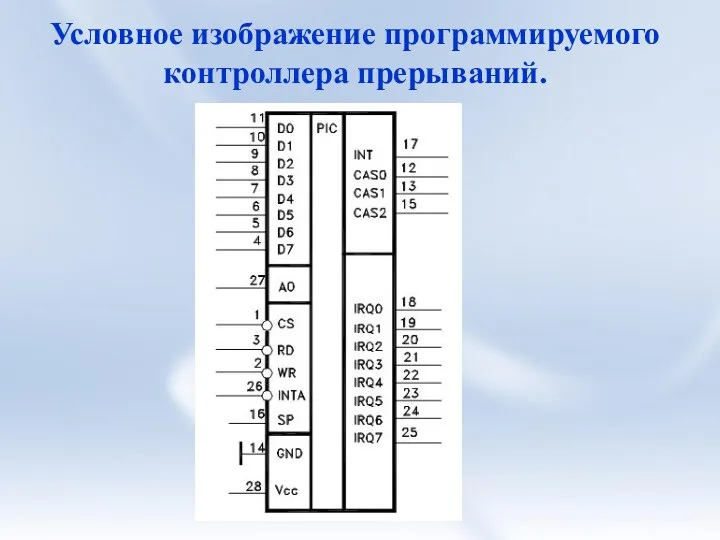
Условное изображение программируемого контроллера прерываний.
Условное изображение программируемого контроллера прерываний.

Назначение выводов
D0 - D7 - Двунаправленные выводы с импедансным состоянием,
Назначение выводов
D0 - D7 - Двунаправленные выводы с импедансным состоянием,
 Диагностика в ангиологии
Диагностика в ангиологии Свобода совести
Свобода совести Презентация Microsoft Office PowerPoint
Презентация Microsoft Office PowerPoint Информационно-измерительная система пирометрического типа для малоразмерного беспилотного летательного аппарата (бпла)
Информационно-измерительная система пирометрического типа для малоразмерного беспилотного летательного аппарата (бпла) Команды и функции системы Maxima
Команды и функции системы Maxima Тварини Африки
Тварини Африки презентация классного часа ко Дню Знаний
презентация классного часа ко Дню Знаний Географы путешественники
Географы путешественники Презентация к урокам по теме Химические свойства Металлов
Презентация к урокам по теме Химические свойства Металлов Презентация Суша часть 2
Презентация Суша часть 2 Абразивные материалы и абразивная обработка
Абразивные материалы и абразивная обработка Автоматизированное рабочее место дежурного по станции
Автоматизированное рабочее место дежурного по станции Машинобудування України
Машинобудування України Определение места заложения стволов. Расчет поперечного сечения стволов по годовой мощности шахты, построение сечения стволов
Определение места заложения стволов. Расчет поперечного сечения стволов по годовой мощности шахты, построение сечения стволов Природный и попутный нефтяной газы
Природный и попутный нефтяной газы Героические страницы Великой Отечественной войны в жизни моей семьи
Героические страницы Великой Отечественной войны в жизни моей семьи ШЕВЧЕНКО (2)
ШЕВЧЕНКО (2) Сетевые информационные системы для различных направлений профессиональной деятельности
Сетевые информационные системы для различных направлений профессиональной деятельности Русская архитектура
Русская архитектура Основные виды кабелей для компьютерных сетей
Основные виды кабелей для компьютерных сетей ЧУДО-АПЕЛЬСИН
ЧУДО-АПЕЛЬСИН Экологическая безопасность акваторий дальневосточных морей Российской Федерации
Экологическая безопасность акваторий дальневосточных морей Российской Федерации Персональный компьютер
Персональный компьютер Знатоки географии. Викторина
Знатоки географии. Викторина Презентация Наша группа самая лучшая
Презентация Наша группа самая лучшая Экономические учения древнего Китая
Экономические учения древнего Китая Книжка- малышка Зимняя сказка
Книжка- малышка Зимняя сказка ВИЧ-инфекция
ВИЧ-инфекция