- Obrabotka_signalov_v_RTS_-_L1

Содержание
- 2. Требования по курсу 2 Посещение лекций >80% Работа на практический занятиях - работа + сдача контрольных
- 3. 3 3 Литература по курсу Основная литература 1. Е. В. Масалов. Радиотехнические системы: Учебное пособие. -
- 4. Тема занятия 4 Что такое радиотехника и радиотехническая система Задача приема сигналов – постановка и решение
- 5. 5 5 Радио и радиотехника Радиотехника – область науки и техники, использующая волны и излучения для
- 6. 6 Классификация РТС В рамках системных принципов выделяют следующие особенности радиотехнических систем: Целостность – наличие у
- 7. Классификация радиотехнических систем 7 Классификация радиотехнических систем Системы передачи информации – системы связи (многоканальная радиосвязь, радиорелейная
- 8. Пример структурной схемы системы передачи информации 8 Общее – решение задачи приема из наблюдений
- 9. Элементы теории приема сигналов 9 3. Наблюдение observation y y=s+n (noise) Элементы общей теории приема сигналов
- 10. Частные задачи приема сигналов 10 H0 = > y=n H1 =>y=s+n ПНО – правильное необнаружение ПР
- 11. 11 Элементы анализа и синтеза M – модель – описание гипотез при помощи формул p0, p1,
- 12. Задачи и этапы решения обнаружения сигналов 12 Detection – обнаружение Discrimination – различение Н0,Н1, Н2, ….Hm
- 13. Задачи и этапы решения обнаружения сигналов 13 6. Идентификация - Identification Переходим к признаковому распознаванию (
- 14. 14 15 Случайная величина. Вероятность случайной величины Случайная величина — это переменная, значения которой представляют собой
- 15. 15 16 Определение вероятности случайной величины Вероятностью Р(А) события А называется определенная на А однозначная функция,
- 16. 17 называется законом распределения вероятностей. ∑ Pi = 1 она называется дискретной, и ее вероятностное описание
- 17. Вероятностное описание случайной величины 18 p(v) >0 1. 2.
- 18. Числовые характеристики плотности вероятности 19 Математическим ожиданием (МО) функции ϕ ( X ) дискретной или случайной
- 19. Моменты случайной величины 20
- 20. Примеры распределений и плотностей вероятности случайных величин 21 Равномерное распределение
- 21. Пример: симуляция равномерного распределения 22 x=rand(2000,1); subplot(2,1,1) plot(x) title(Равномерное распределение ') subplot(2,1,2) hist(x) title(Гистограмма равномерного распределения
- 22. Нормальное (гауссово ) распределение 23
- 23. Нормальное (гауссово) распределение 24 0 200 400 600 800 1000 1200 1400 1600 1800 2000 4
- 24. Хи-квадрат распределение 25
- 26. Скачать презентацию
Требования по курсу
2
Посещение лекций >80%
Работа на практический занятиях - работа + сдача контрольных
Требования по курсу
2
Посещение лекций >80%
Работа на практический занятиях - работа + сдача контрольных
3
3
Литература по курсу
Основная литература
1. Е. В. Масалов. Радиотехнические системы: Учебное пособие.
3
3
Литература по курсу
Основная литература
1. Е. В. Масалов. Радиотехнические системы: Учебное пособие.
Тема занятия
4
Что такое радиотехника и радиотехническая система
Задача приема сигналов – постановка
Тема занятия
4
Что такое радиотехника и радиотехническая система
Задача приема сигналов – постановка
5
5
Радио и радиотехника
Радиотехника – область науки и техники, использующая волны и
5
5
Радио и радиотехника
Радиотехника – область науки и техники, использующая волны и
6
Классификация РТС
В рамках системных принципов выделяют следующие особенности радиотехнических систем:
Целостность –
6
Классификация РТС
В рамках системных принципов выделяют следующие особенности радиотехнических систем:
Целостность –
Классификация радиотехнических систем
7
Классификация радиотехнических систем
Системы передачи информации – системы связи (многоканальная
Классификация радиотехнических систем
7
Классификация радиотехнических систем
Системы передачи информации – системы связи (многоканальная

Пример структурной схемы системы передачи информации
8
Общее – решение задачи приема из
Пример структурной схемы системы передачи информации
8
Общее – решение задачи приема из
Элементы теории приема сигналов
9
3. Наблюдение observation y
y=s+n
(noise)
Элементы общей теории приема сигналов
Событие event
Элементы теории приема сигналов
9
3. Наблюдение observation y
y=s+n
(noise)
Элементы общей теории приема сигналов
Событие event
Частные задачи приема сигналов
10
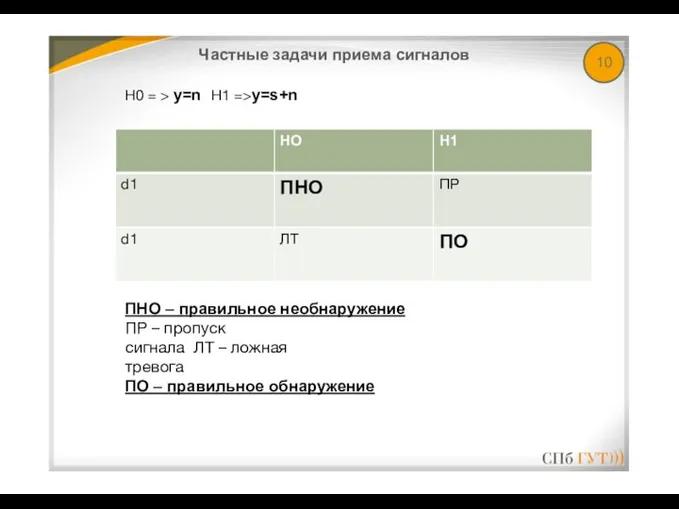
H0 = > y=n H1 =>y=s+n
ПНО – правильное необнаружение
ПР
Частные задачи приема сигналов
10
H0 = > y=n H1 =>y=s+n
ПНО – правильное необнаружение
ПР
11
Элементы анализа и синтеза
M – модель – описание гипотез при помощи
11
Элементы анализа и синтеза
M – модель – описание гипотез при помощи
Задачи и этапы решения обнаружения сигналов
12
Detection – обнаружение
Discrimination – различение Н0,Н1,
Задачи и этапы решения обнаружения сигналов
12
Detection – обнаружение
Discrimination – различение Н0,Н1,
Задачи и этапы решения обнаружения сигналов
13
6. Идентификация - Identification Переходим к
Задачи и этапы решения обнаружения сигналов
13
6. Идентификация - Identification Переходим к
14
15
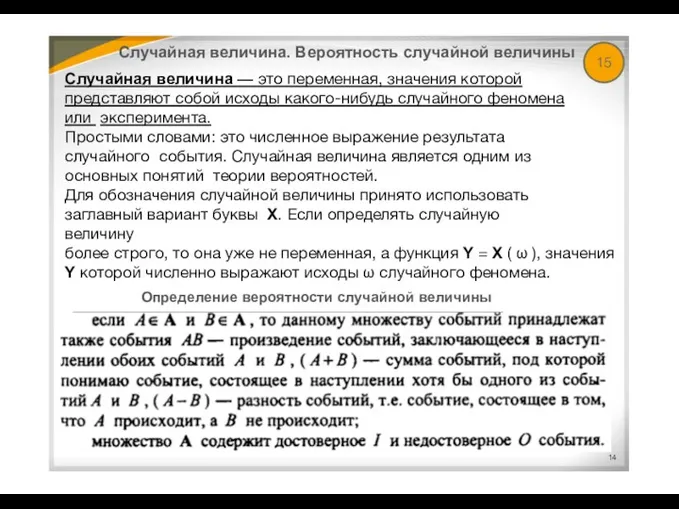
Случайная величина. Вероятность случайной величины
Случайная величина — это переменная, значения которой
14
15
Случайная величина. Вероятность случайной величины
Случайная величина — это переменная, значения которой
15
16
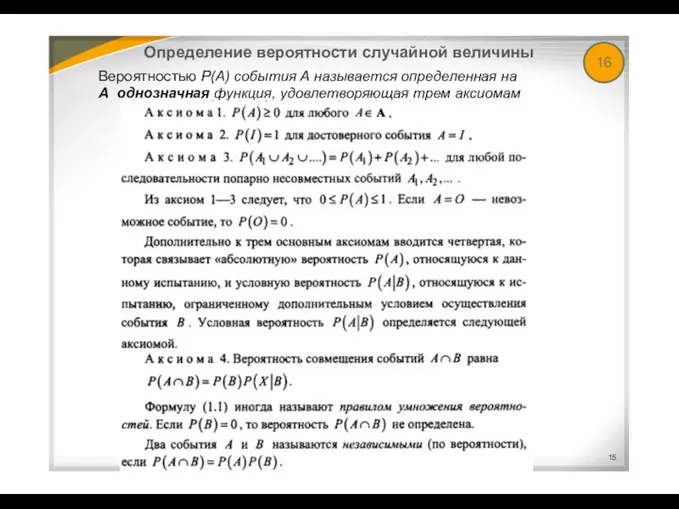
Определение вероятности случайной величины
Вероятностью Р(А) события А называется определенная на А
15
16
Определение вероятности случайной величины
Вероятностью Р(А) события А называется определенная на А
17
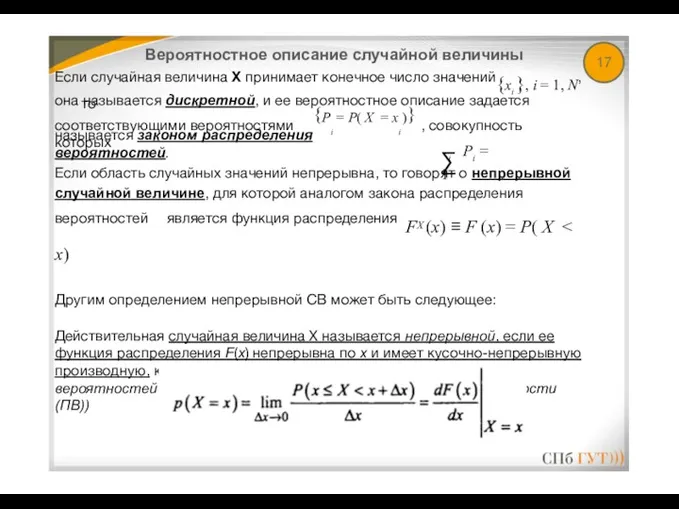
называется законом распределения вероятностей.
∑ Pi = 1
она называется дискретной, и ее
17
называется законом распределения вероятностей.
∑ Pi = 1
она называется дискретной, и ее
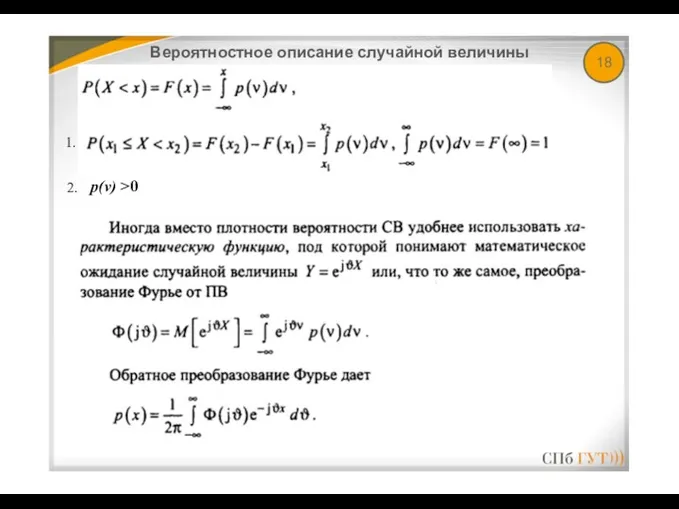
Вероятностное описание случайной величины
18
p(v) >0
1.
2.
Вероятностное описание случайной величины
18
p(v) >0
1.
2.
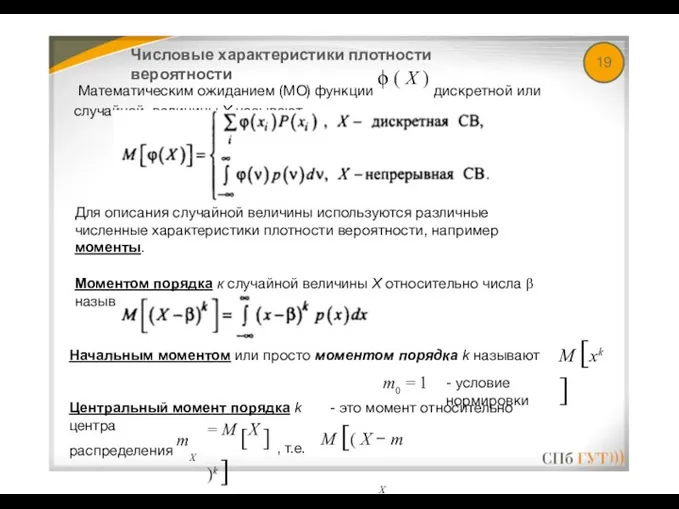
Числовые характеристики плотности вероятности
19
Математическим ожиданием (МО) функции ϕ ( X )
Числовые характеристики плотности вероятности
19
Математическим ожиданием (МО) функции ϕ ( X )
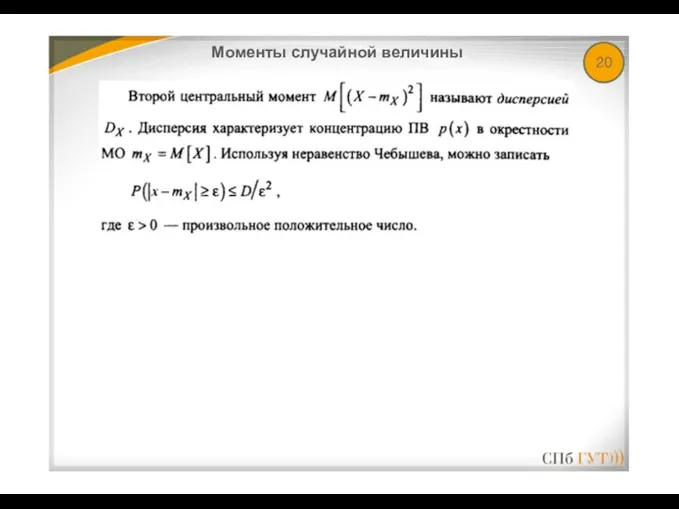
Моменты случайной величины
20
Моменты случайной величины
20
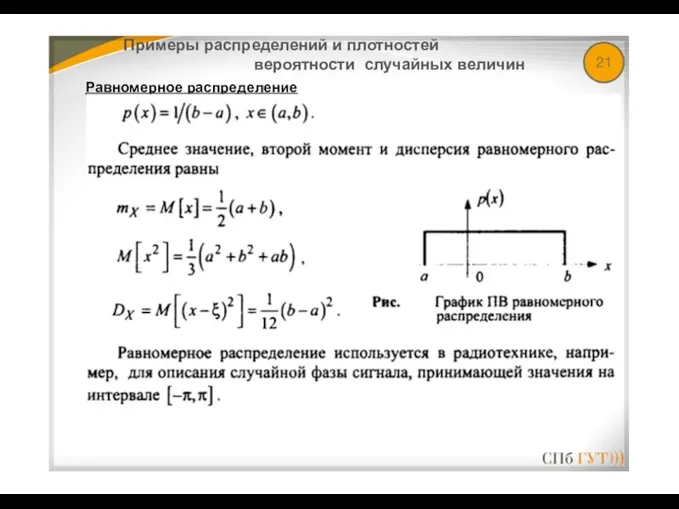
Примеры распределений и плотностей вероятности случайных величин
21
Равномерное распределение
Примеры распределений и плотностей вероятности случайных величин
21
Равномерное распределение
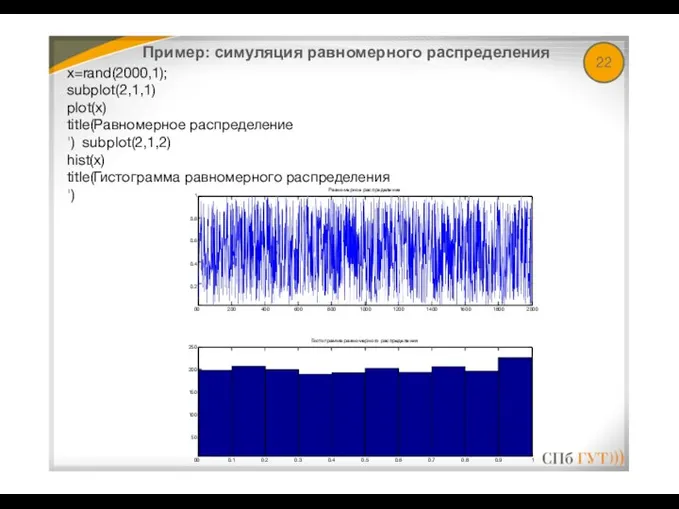
Пример: симуляция равномерного распределения
22
x=rand(2000,1); subplot(2,1,1) plot(x)
title(Равномерное распределение ') subplot(2,1,2)
hist(x)
title(Гистограмма равномерного распределения
Пример: симуляция равномерного распределения
22
x=rand(2000,1); subplot(2,1,1) plot(x)
title(Равномерное распределение ') subplot(2,1,2)
hist(x)
title(Гистограмма равномерного распределения
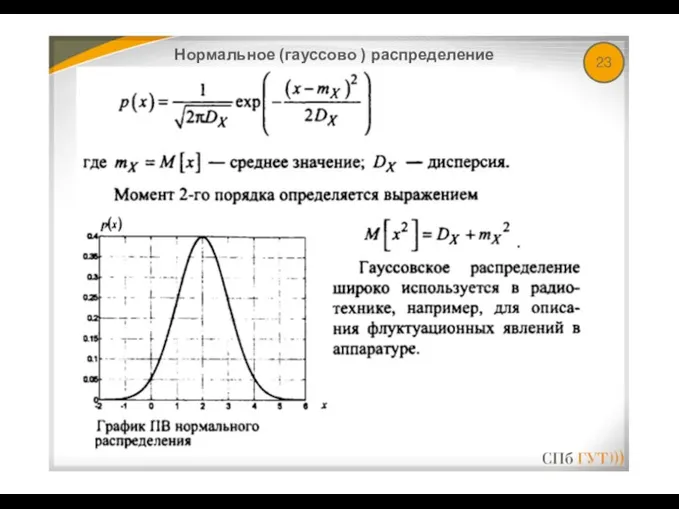
Нормальное (гауссово ) распределение
23
Нормальное (гауссово ) распределение
23
Нормальное (гауссово) распределение
24
0
200
400
600
800
1000
1200
1400
1600
1800
2000
4
3
2
1
0
-1
-2
-3
-4
Равномерное (гауссово) распределение
-4
-3
-2
-1
0
1
2
3
4
600
500
400
300
200
100
0
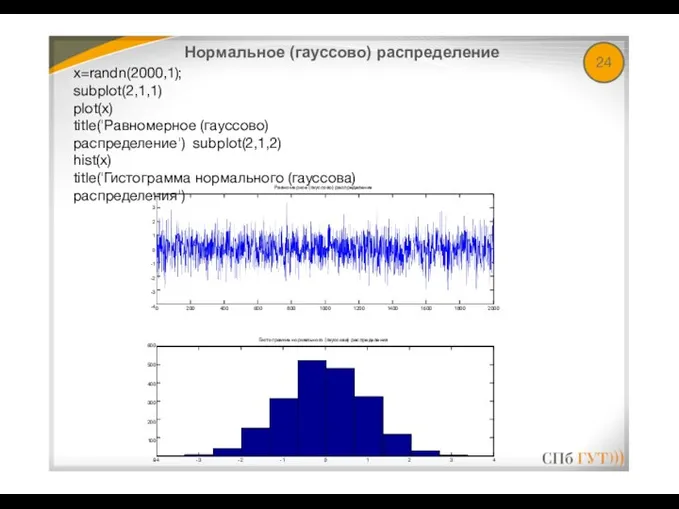
Гистограмма нормального (гауссова) распределения
x=randn(2000,1); subplot(2,1,1) plot(x)
title('Равномерное (гауссово)
Нормальное (гауссово) распределение
24
0
200
400
600
800
1000
1200
1400
1600
1800
2000
4
3
2
1
0
-1
-2
-3
-4
Равномерное (гауссово) распределение
-4
-3
-2
-1
0
1
2
3
4
600
500
400
300
200
100
0
Гистограмма нормального (гауссова) распределения
x=randn(2000,1); subplot(2,1,1) plot(x)
title('Равномерное (гауссово)
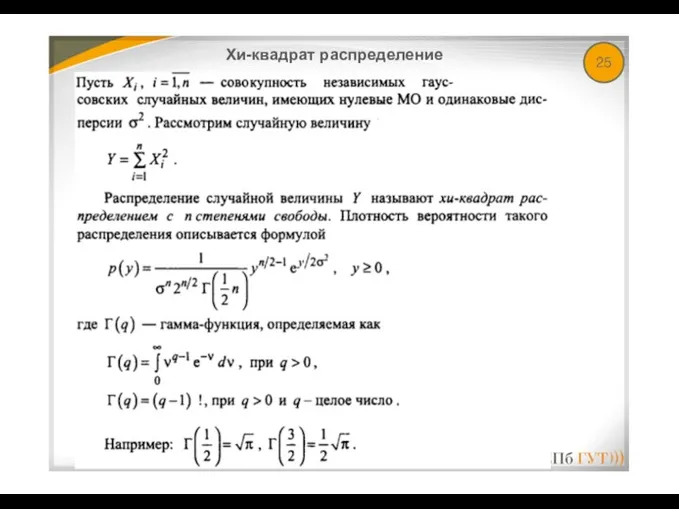
Хи-квадрат распределение
25
Хи-квадрат распределение
25
 Мастер класс Африканские бусы из бумаги
Мастер класс Африканские бусы из бумаги Технология производства продуктов овцеводства
Технология производства продуктов овцеводства Птицы (фотографии)
Птицы (фотографии) 1-е и 2-е Послания к Фессалоникийцам (Солунянам) апостола Павла
1-е и 2-е Послания к Фессалоникийцам (Солунянам) апостола Павла Экономические реформы в период перестройки 1985-1991 гг
Экономические реформы в период перестройки 1985-1991 гг Описать технологию ремонта скрытой электропроводки
Описать технологию ремонта скрытой электропроводки Острый живот при воспалительных заболеваниях органов малого таза
Острый живот при воспалительных заболеваниях органов малого таза Компьютербасты адамдар
Компьютербасты адамдар Н.И.Роговцева. Технология. 3 класс. Проект Детская площадка
Н.И.Роговцева. Технология. 3 класс. Проект Детская площадка Введение в систематику. Низшие растения
Введение в систематику. Низшие растения Кардиоэмболический инсульт
Кардиоэмболический инсульт sec101-lec04-pub
sec101-lec04-pub Образовательные технологии, используемые на уроках химии для повышения мотивации обучения
Образовательные технологии, используемые на уроках химии для повышения мотивации обучения Национальная и конфессиональная политика в Республике Калмыкия
Национальная и конфессиональная политика в Республике Калмыкия Печатная реклама. Приюты для животных
Печатная реклама. Приюты для животных Кормление телят на ферме
Кормление телят на ферме Химия и фотография
Химия и фотография Наркотики, и это еще не вся правда о них
Наркотики, и это еще не вся правда о них Логические выражения и логические операции
Логические выражения и логические операции Урок-презентация Строим школьный дом
Урок-презентация Строим школьный дом Палач человечества - алкоголь
Палач человечества - алкоголь Легкая атлетика
Легкая атлетика Люблю тебя, мой край родной, Воскресенск!
Люблю тебя, мой край родной, Воскресенск! Лев Николаевич Толстой
Лев Николаевич Толстой оформление реферата
оформление реферата Работа с инструментом Перо
Работа с инструментом Перо Презентация Электролиз
Презентация Электролиз Клиническая физиология кислотно-щелочного равновесия
Клиническая физиология кислотно-щелочного равновесия