- Определение технических характеристик станка

Содержание
- 2. 2 РАЗРАБОТКА И ОПИСАНИЕ КОМПОНОВКИ СТАНКА
- 3. 3 РАЗРАБОТКА И ОПИСАНИЕ КИНЕМАТИЧЕСКОЙ СТРУКТУРЫ СТАНКА
- 4. «Типы передач и структура шестеренчатых коробок » В зависимости от количества валов коробки бывают двухваловые и
- 5. Многоваловые коробки Число ступеней скорости z, которое обеспечивает данная коробка, составляет z= Р1· Р2·Р3 = 3·2·2=
- 6. Исходными данными для проектирования являются: - предельные значения частоты вращения шпинделя nmin = n1, nmax =
- 7. Определение числа ступеней скорости и количества групп передач где Rn – диапазон регулирования Например nmin=100; nmax=1250,
- 8. Выбираем стандартный ряд частот вращения:
- 9. Порядок расположения и последовательность переключения групповых передач в приводе Коробка может быть выполнена в соответствии с
- 10. В порядке переключения группа передач может быть: 1. Основной (Р0) - она переключается в первую очередь.
- 11. Формула структуры привода Выражение вида z = Р0(x0) Р1(x1)…Рm(xm), задающее порядок расположения групп вдоль кинематической цепи
- 12. Проверка осуществимости варианта Проверка выполняется только для последней переборной группы, т.к ее характеристика максимальна.
- 13. Строим структурную сетку Z=3(1)•2(3)•2(6)
- 14. График частот вращения: 0,25 ≤ i≤ 2
- 15. Z=3(1)•2(3)•2(6) Кинематическая схема привода главного движения
- 16. Определение численных значений передаточных отношений:
- 18. Скачать презентацию
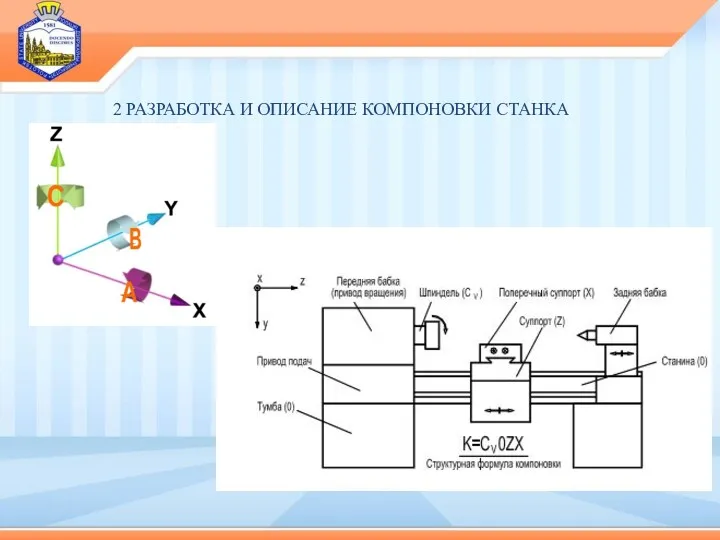
2 РАЗРАБОТКА И ОПИСАНИЕ КОМПОНОВКИ СТАНКА
2 РАЗРАБОТКА И ОПИСАНИЕ КОМПОНОВКИ СТАНКА
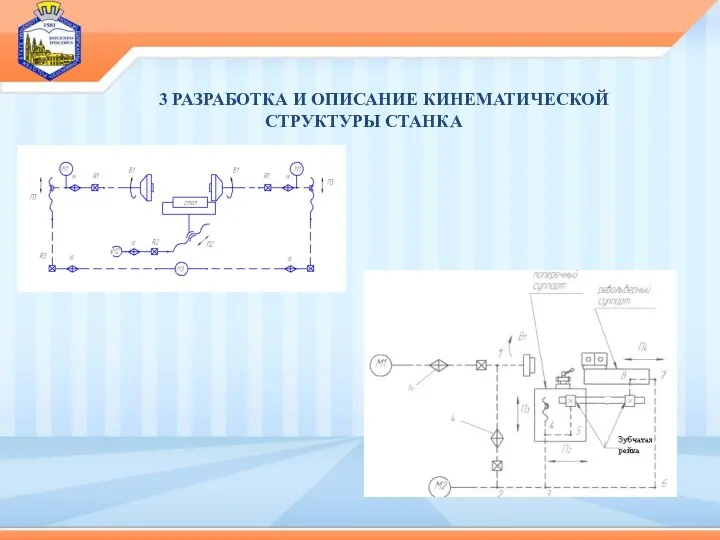
3 РАЗРАБОТКА И ОПИСАНИЕ КИНЕМАТИЧЕСКОЙ СТРУКТУРЫ СТАНКА
3 РАЗРАБОТКА И ОПИСАНИЕ КИНЕМАТИЧЕСКОЙ СТРУКТУРЫ СТАНКА
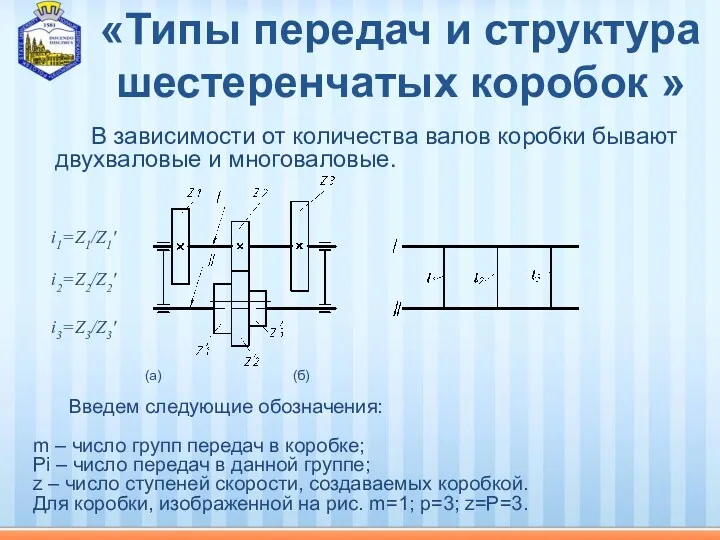
«Типы передач и структура шестеренчатых коробок »
В зависимости от количества валов
«Типы передач и структура шестеренчатых коробок »
В зависимости от количества валов
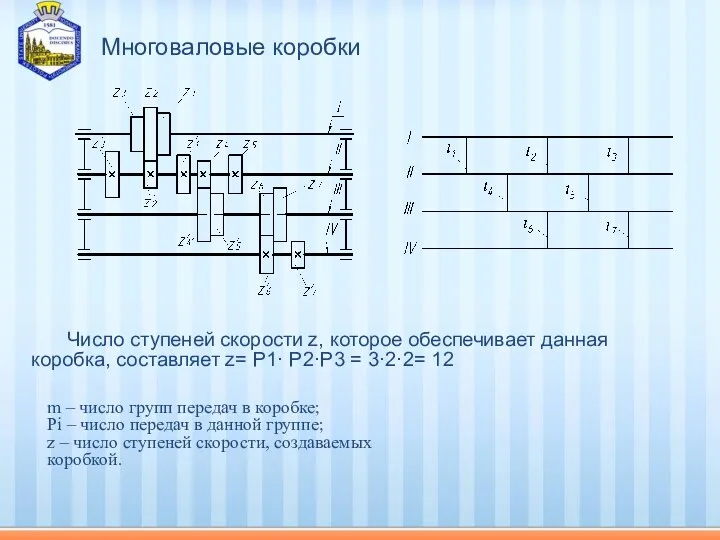
Многоваловые коробки
Число ступеней скорости z, которое обеспечивает данная коробка, составляет z=
Многоваловые коробки
Число ступеней скорости z, которое обеспечивает данная коробка, составляет z=
Исходными данными для проектирования являются:
- предельные значения частоты вращения шпинделя
Исходными данными для проектирования являются:
- предельные значения частоты вращения шпинделя
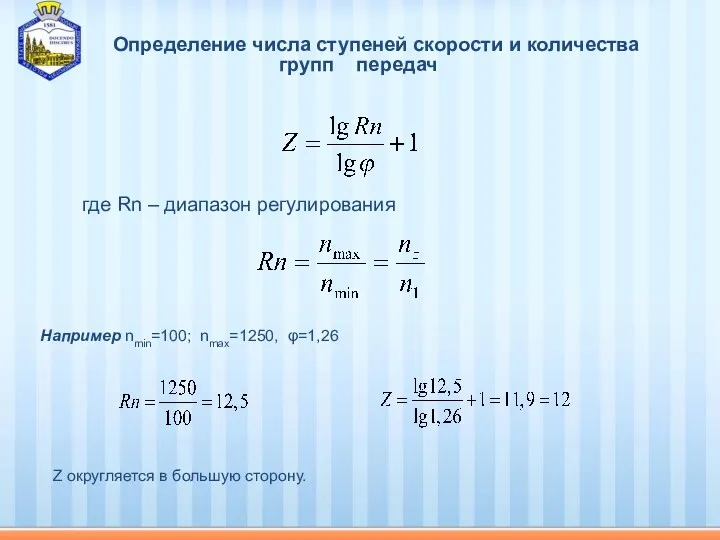
Определение числа ступеней скорости и количества групп передач
где Rn – диапазон
Определение числа ступеней скорости и количества групп передач
где Rn – диапазон
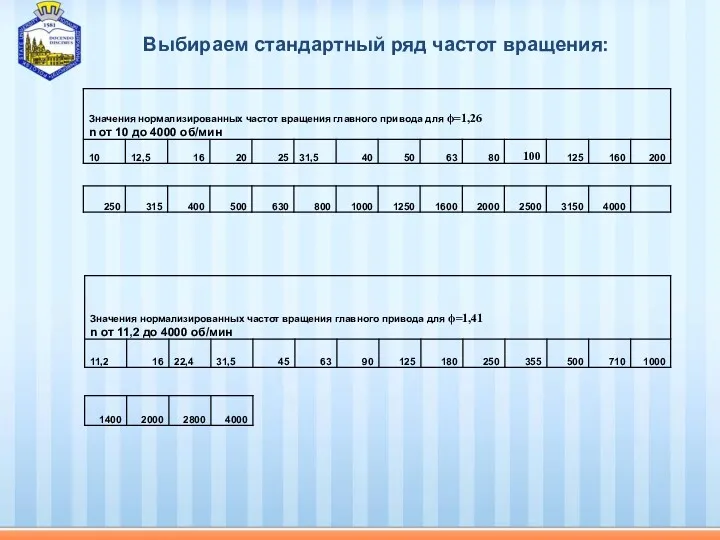
Выбираем стандартный ряд частот вращения:
Выбираем стандартный ряд частот вращения:
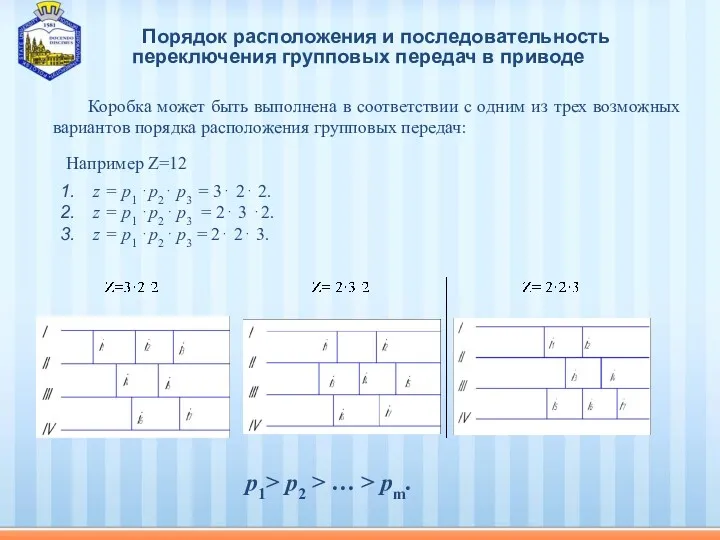
Порядок расположения и последовательность переключения групповых передач в приводе
Коробка может быть
Порядок расположения и последовательность переключения групповых передач в приводе
Коробка может быть

В порядке переключения группа передач может быть:
1. Основной (Р0) - она
В порядке переключения группа передач может быть:
1. Основной (Р0) - она
Формула структуры привода
Выражение вида
z = Р0(x0) Р1(x1)…Рm(xm),
задающее порядок расположения
Формула структуры привода
Выражение вида
z = Р0(x0) Р1(x1)…Рm(xm),
задающее порядок расположения
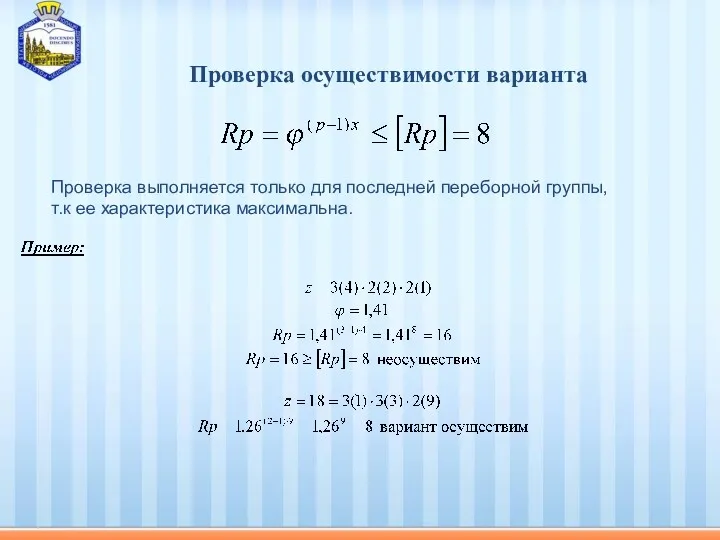
Проверка осуществимости варианта
Проверка выполняется только для последней переборной группы,
т.к ее
Проверка осуществимости варианта
Проверка выполняется только для последней переборной группы,
т.к ее
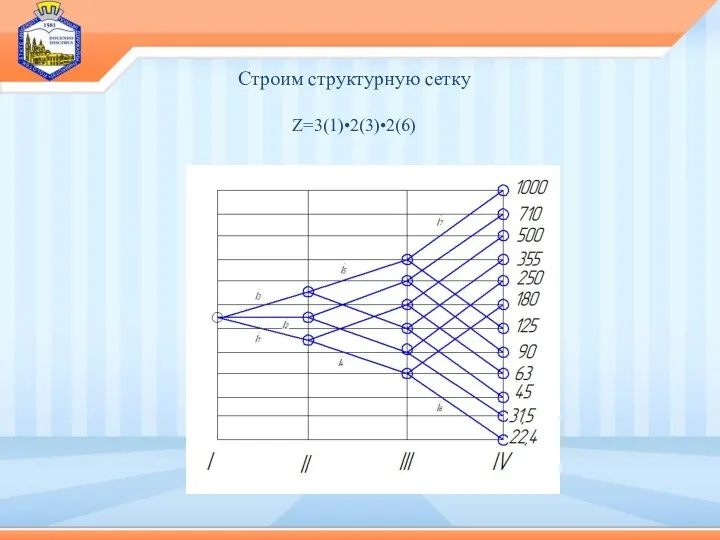
Строим структурную сетку
Z=3(1)•2(3)•2(6)
Строим структурную сетку
Z=3(1)•2(3)•2(6)
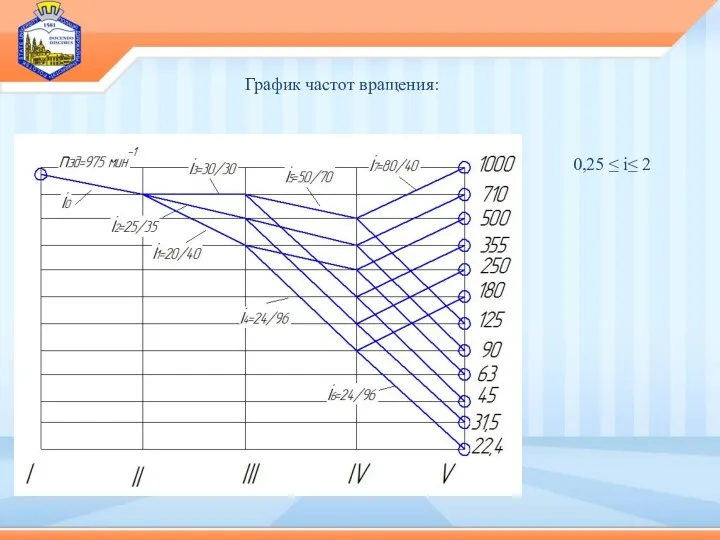
График частот вращения:
0,25 ≤ i≤ 2
График частот вращения:
0,25 ≤ i≤ 2
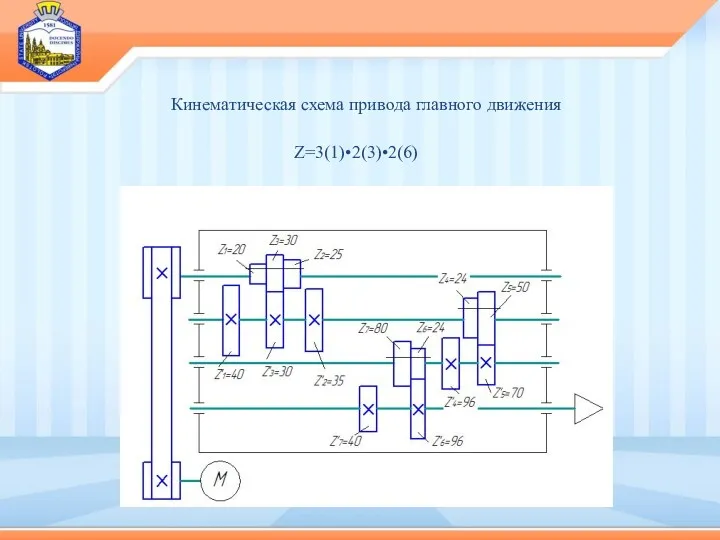
Z=3(1)•2(3)•2(6)
Кинематическая схема привода главного движения
Z=3(1)•2(3)•2(6)
Кинематическая схема привода главного движения
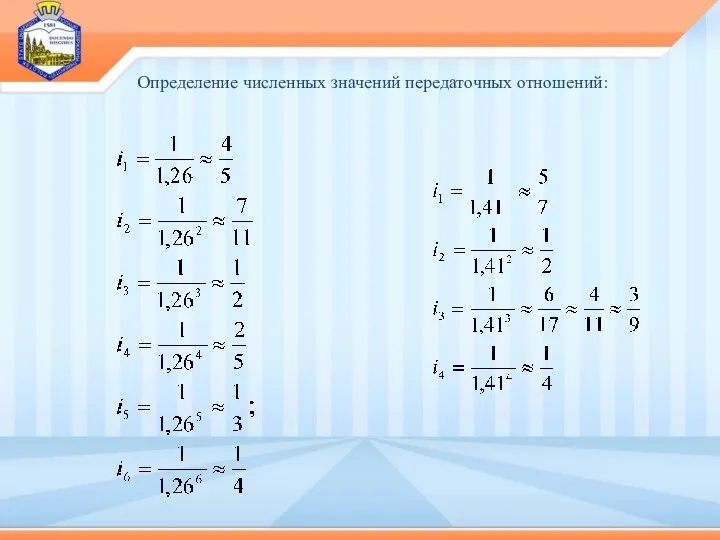
Определение численных значений передаточных отношений:
Определение численных значений передаточных отношений:
 Штамповые испытания нежестких дорожных конструкций
Штамповые испытания нежестких дорожных конструкций Развивающая среда во 2младшей группе.
Развивающая среда во 2младшей группе. Компьютер – основной инструмент подготовки текстов
Компьютер – основной инструмент подготовки текстов Внеклассная работа учителя начальных классов
Внеклассная работа учителя начальных классов Материал урока Электролитическая диссоциация
Материал урока Электролитическая диссоциация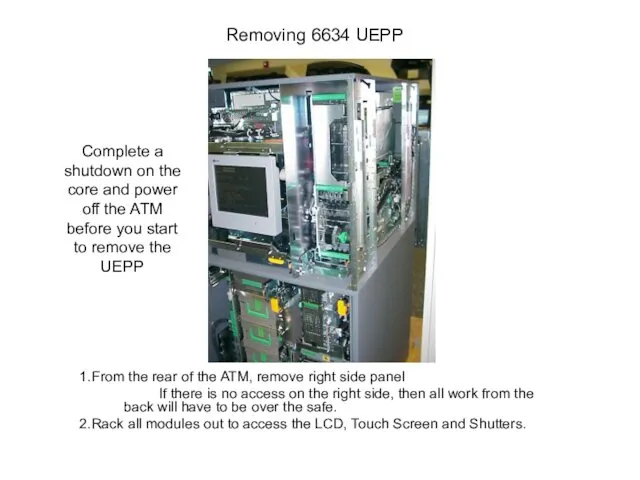 Removing 6634 UEPP
Removing 6634 UEPP Мой дом-моя семья. Материал для родителей.
Мой дом-моя семья. Материал для родителей. Рэфармацыя і цывілізацыя
Рэфармацыя і цывілізацыя bcd067371120e27b50dcb49e8
bcd067371120e27b50dcb49e8 Воспитательная программа
Воспитательная программа Смысл жизни. Виктор Франкл. (Тема 7)
Смысл жизни. Виктор Франкл. (Тема 7) Вектор
Вектор 第八课 Урок 8
第八课 Урок 8 Понятие основ конституционного строя России
Понятие основ конституционного строя России Хроническое легочное сердце
Хроническое легочное сердце Центральная и Восточная Европа
Центральная и Восточная Европа Флористическое оформление витрин в стиле барокко
Флористическое оформление витрин в стиле барокко О реализации мероприятий Формирование комфортной городской среды на территории Волховского муниципального района
О реализации мероприятий Формирование комфортной городской среды на территории Волховского муниципального района Математика 31
Математика 31 Дикие животные
Дикие животные Букет для мамы
Букет для мамы Электрохимические методы. Продолжение. Лекция 10
Электрохимические методы. Продолжение. Лекция 10 Отчет по производственной практике. Архитектура
Отчет по производственной практике. Архитектура Портфолио по профессиональному модулю ПМ.01 Эксплуатация и модификация информационных систем
Портфолио по профессиональному модулю ПМ.01 Эксплуатация и модификация информационных систем Презентация к викторине по творчеству И.С.Тургенева
Презентация к викторине по творчеству И.С.Тургенева Қара бидай мен тритикале сұрыптық ұнға дайындау принциптері
Қара бидай мен тритикале сұрыптық ұнға дайындау принциптері Здоровьесберегающие технологии в системе оздоровительной работы ДОУ согласно требованиям ФГОС
Здоровьесберегающие технологии в системе оздоровительной работы ДОУ согласно требованиям ФГОС Электроэнергетика России
Электроэнергетика России