- Основные понятия и определения

Содержание
- 2. Основные понятия и определения Под автоматизацией понимается применение технических средств и информационных технологий, освобождающих человека частично
- 3. Основные понятия и определения Машины, аппараты или агрегаты, в которых выполняют регулирование, называют объектами регулирования, а
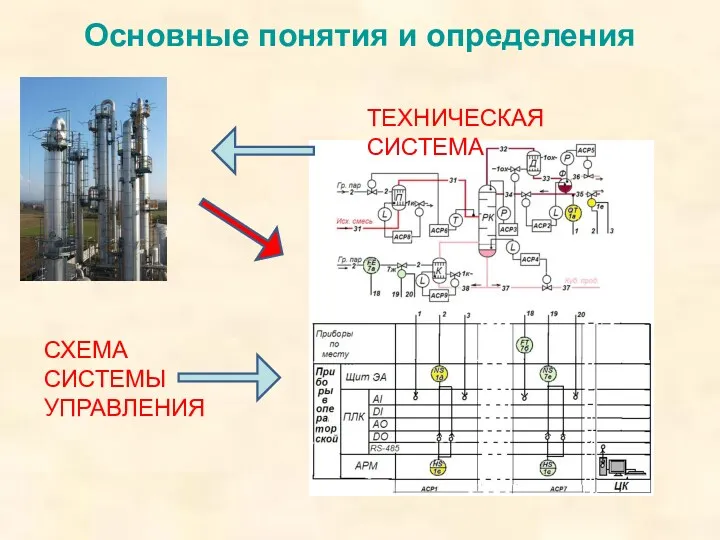
- 4. Основные понятия и определения ТЕХНИЧЕСКАЯ СИСТЕМА СХЕМА СИСТЕМЫ УПРАВЛЕНИЯ
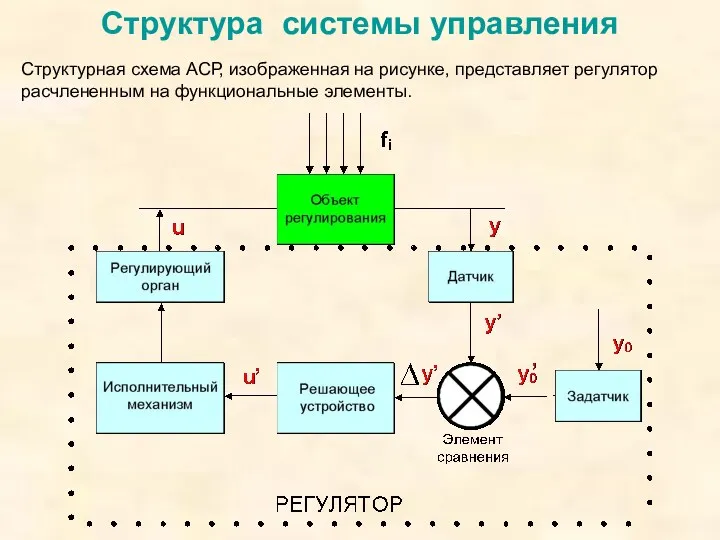
- 5. Структура системы управления Структурная схема АСР, изображенная на рисунке, представляет регулятор расчлененным на функциональные элементы.
- 6. Структура системы управления Датчик воспринимает текущее значение регулируемого параметра y и преобразует его в сигнал измерительной
- 7. Структура системы управления Под действием этого сигнала исполнительный механизм перемещает регулирующий орган. Кроме регулирующего воздействия, на
- 8. Функции систем управления Системы управления могут быть предназначены для выполнения функций: автоматического контроля; автоматической сигнализации; автоматической
- 9. y(τ) - текущее значение регулируемого параметра; y0 - заданное значение регулируемого параметра; Δy(τ) – рассогласование или
- 10. Цель автоматического регулирования − сведение к минимуму отклонения регулируемого параметра от заданного значения Δy(τ) → min,
- 11. Контур АСР – траектория, определяющая последовательность обработки информации в АСР; может быть замкнутым и разомкнутым.
- 13. Скачать презентацию
Основные понятия и определения
Под автоматизацией понимается применение технических средств и информационных
Основные понятия и определения
Под автоматизацией понимается применение технических средств и информационных
Основные понятия и определения
Машины, аппараты или агрегаты, в которых выполняют регулирование,
Основные понятия и определения
Машины, аппараты или агрегаты, в которых выполняют регулирование,
Основные понятия и определения
ТЕХНИЧЕСКАЯ СИСТЕМА
СХЕМА СИСТЕМЫ УПРАВЛЕНИЯ
Основные понятия и определения
ТЕХНИЧЕСКАЯ СИСТЕМА
СХЕМА СИСТЕМЫ УПРАВЛЕНИЯ
Структура системы управления
Структурная схема АСР, изображенная на рисунке, представляет регулятор
Структура системы управления
Структурная схема АСР, изображенная на рисунке, представляет регулятор
Структура системы управления
Датчик воспринимает текущее значение регулируемого параметра y и преобразует
Структура системы управления
Датчик воспринимает текущее значение регулируемого параметра y и преобразует
Структура системы управления
Под действием этого сигнала исполнительный механизм перемещает регулирующий орган.
Структура системы управления
Под действием этого сигнала исполнительный механизм перемещает регулирующий орган.
Функции систем управления
Системы управления могут быть предназначены для выполнения функций:
автоматического контроля;
автоматической
Функции систем управления
Системы управления могут быть предназначены для выполнения функций:
автоматического контроля;
автоматической
y(τ) - текущее значение регулируемого параметра;
y0 - заданное значение регулируемого
y(τ) - текущее значение регулируемого параметра;
y0 - заданное значение регулируемого
Цель автоматического регулирования − сведение к минимуму отклонения регулируемого параметра
Цель автоматического регулирования − сведение к минимуму отклонения регулируемого параметра
Контур АСР – траектория, определяющая последовательность обработки информации в АСР;
Контур АСР – траектория, определяющая последовательность обработки информации в АСР;
 Презентация по теме Добро и зло.
Презентация по теме Добро и зло. Животные тропических лесов
Животные тропических лесов Как развивать внимание? (часть 2)
Как развивать внимание? (часть 2) Сахара, соли, аминокислоты, минералы
Сахара, соли, аминокислоты, минералы Человек в системе социальных
Человек в системе социальных Информация с упаковки
Информация с упаковки Состав слова. Тест
Состав слова. Тест Любимый город - С-Петербург
Любимый город - С-Петербург Реализация комплексно-тематического принципа и принципа интеграции в образовательной практике детского сада
Реализация комплексно-тематического принципа и принципа интеграции в образовательной практике детского сада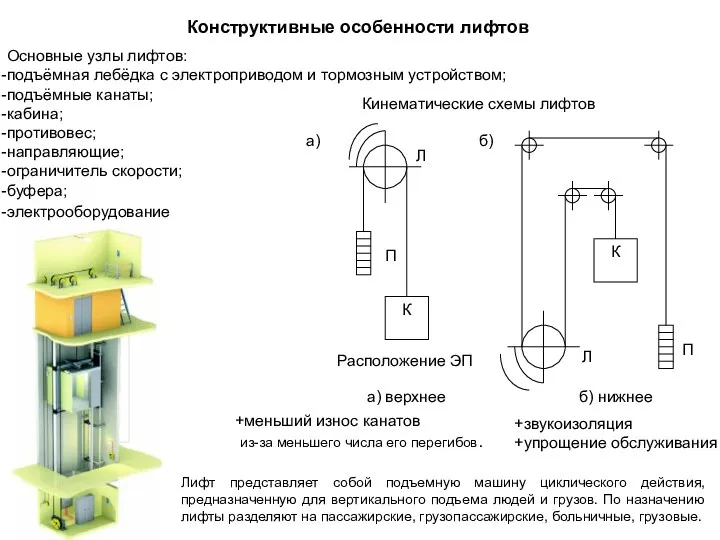 Конструктивные особенности лифтов
Конструктивные особенности лифтов Программа индивидуального добровольного медицинского страхования
Программа индивидуального добровольного медицинского страхования Полиомиелит. Мероприятия в отношении больных полиомиелитом, острыми вялыми параличами
Полиомиелит. Мероприятия в отношении больных полиомиелитом, острыми вялыми параличами Методы измерений в гематологии
Методы измерений в гематологии Здоровое питание – необходимое условие в жизни ребенка
Здоровое питание – необходимое условие в жизни ребенка Технологический процесс балочных перекрытий
Технологический процесс балочных перекрытий Мұнайды мазутқа дейін өңдеу. Процестің материалдық балансы
Мұнайды мазутқа дейін өңдеу. Процестің материалдық балансы Тваринництво світу (9 клас)
Тваринництво світу (9 клас) Основы управления техносферной безопасностью
Основы управления техносферной безопасностью Математический лабиринт
Математический лабиринт формирование ключевых компетенций
формирование ключевых компетенций Kreeka kultuur I. Jumalad
Kreeka kultuur I. Jumalad Борьба судьи Самсона с филистимлянами. Книга Руфь. Общее введение в книги Царств
Борьба судьи Самсона с филистимлянами. Книга Руфь. Общее введение в книги Царств Презентация Фантазии из шкатулки
Презентация Фантазии из шкатулки Свойства оксидов, кислот, оснований и солей в свете теории электролитической диссоциации и процессов окисления-восстановления
Свойства оксидов, кислот, оснований и солей в свете теории электролитической диссоциации и процессов окисления-восстановления Курс лекций для операторов ДНГ и операторов ПУ
Курс лекций для операторов ДНГ и операторов ПУ Классный час Россия из века в век. 1150 лет Российской государственности
Классный час Россия из века в век. 1150 лет Российской государственности Презентация Счастливый случай. Диск
Презентация Счастливый случай. Диск Бытовые электроприборы на кухне
Бытовые электроприборы на кухне