- Пример использования проматриц в задачах управления электромеханическими системами

Содержание
- 2. Методы современной теории управления _ Асанов А.З. _
- 4. 4
- 9. Методы современной теории управления _ Асанов А.З. _
- 10. Рассматривается электромеханическая система с электродвигателем постоянного тока с независимым возбуждением. Положим
- 11. Введем в рассмотрение расширенный вектор состояния объекта Тогда математическая модель объекта
- 12. Обобщенные структуры систем автоматического управления
- 13. Управление по выходной величине Управление по состоянию
- 14. Структура наблюдателя состояния Структура системы управления с наблюдателем состояния
- 15. Структура наблюдателя состояния э/м системы
- 16. В качестве цели задачи синтеза, вводим понятие ошибки наблюдения
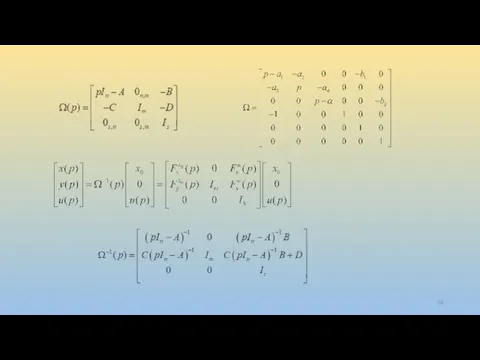
- 17. Проматрица моделирования
- 19. Matlab пример >> syms p I=eye(3) I = 1 0 0 0 1 0 0 0
- 20. >> H=inv(F) H = [ p/(p^2 + p + 6), 2/(p^2 + p + 6), -8/(p^3
- 21. >> Fux=H*B Fux = [ (2*p)/(p^2 + p + 6), -24/(p^3 + 6*p^2 + 11*p +
- 23. Скачать презентацию
Методы современной теории управления _ Асанов А.З. _
Методы современной теории управления _ Асанов А.З. _
4
4





Методы современной теории управления _ Асанов А.З. _
Методы современной теории управления _ Асанов А.З. _
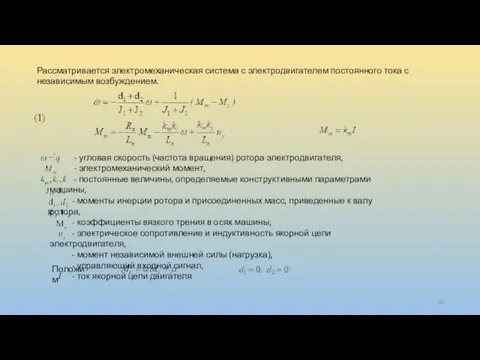
Рассматривается электромеханическая система с электродвигателем постоянного тока с независимым возбуждением.
Положим
Рассматривается электромеханическая система с электродвигателем постоянного тока с независимым возбуждением.
Положим

Введем в рассмотрение расширенный вектор состояния объекта
Тогда математическая модель объекта
Введем в рассмотрение расширенный вектор состояния объекта
Тогда математическая модель объекта
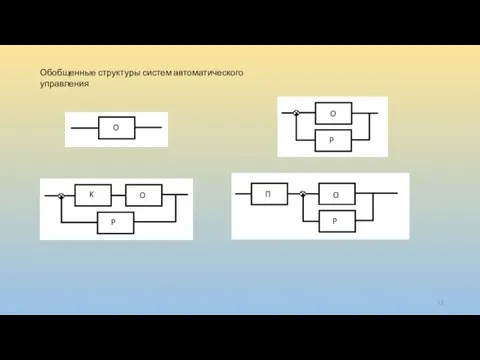
Обобщенные структуры систем автоматического управления
Обобщенные структуры систем автоматического управления
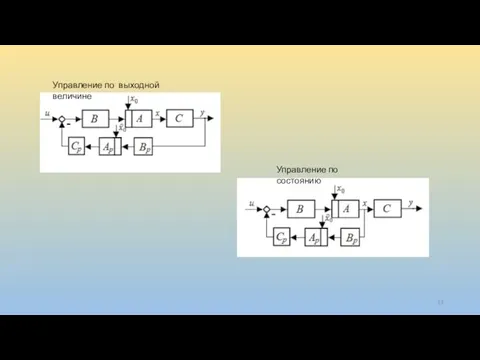
Управление по выходной величине
Управление по состоянию
Управление по выходной величине
Управление по состоянию
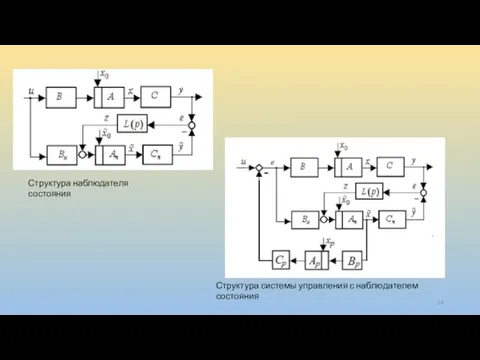
Структура наблюдателя состояния
Структура системы управления с наблюдателем состояния
Структура наблюдателя состояния
Структура системы управления с наблюдателем состояния

Структура наблюдателя состояния э/м системы
Структура наблюдателя состояния э/м системы

В качестве цели задачи синтеза, вводим понятие ошибки наблюдения
В качестве цели задачи синтеза, вводим понятие ошибки наблюдения
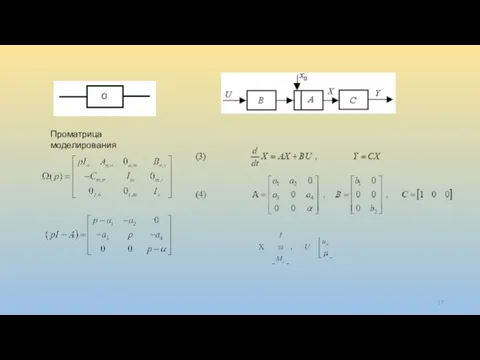
Проматрица моделирования
Проматрица моделирования
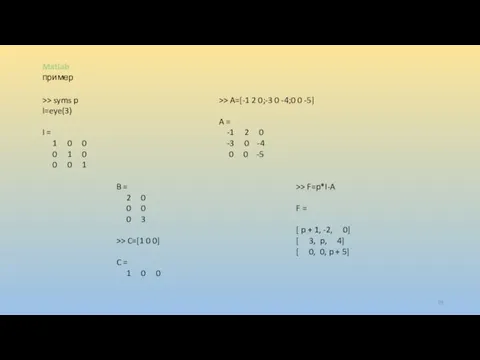
Matlab пример
>> syms p
I=eye(3)
I =
1 0 0
0 1 0
Matlab пример
>> syms p
I=eye(3)
I =
1 0 0
0 1 0

>> H=inv(F)
H =
[ p/(p^2 + p + 6), 2/(p^2 +
>> H=inv(F)
H =
[ p/(p^2 + p + 6), 2/(p^2 +
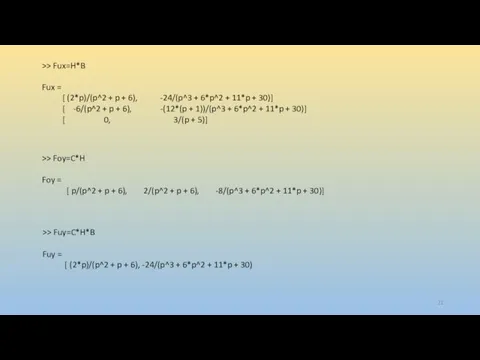
>> Fux=H*B
Fux =
[ (2*p)/(p^2 + p + 6), -24/(p^3
>> Fux=H*B
Fux =
[ (2*p)/(p^2 + p + 6), -24/(p^3
 Майка для куклы.
Майка для куклы. Развитие игровой деятельности ребенка. Консультация для родителей
Развитие игровой деятельности ребенка. Консультация для родителей 10 законов дружбы
10 законов дружбы Географическое положение территории Липецкой области. Влияние на природу и хозяйство.
Географическое положение территории Липецкой области. Влияние на природу и хозяйство. мастер-класс для учителей О чем говорит реклама на английском?
мастер-класс для учителей О чем говорит реклама на английском?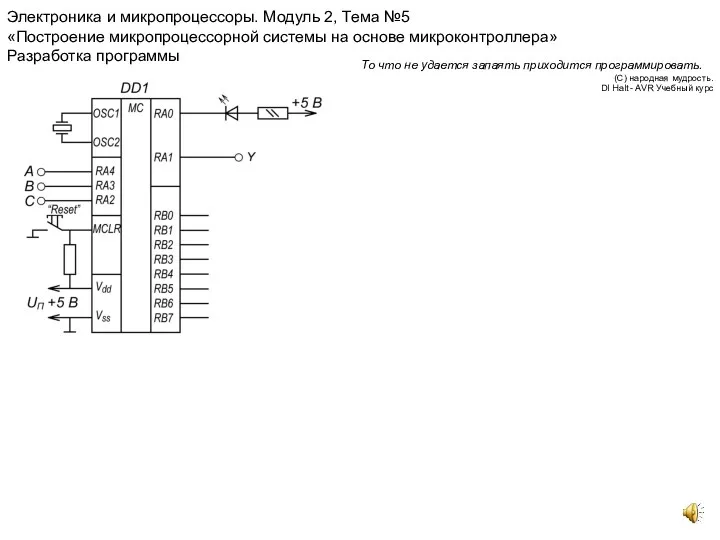 Электроника и микропроцессоры. Модуль 2,
Электроника и микропроцессоры. Модуль 2, Презентация к классному часу Чечня- от истоков до наших дней
Презентация к классному часу Чечня- от истоков до наших дней Принципы поэтапной реабилитации детей с ВРГН
Принципы поэтапной реабилитации детей с ВРГН Понятие пищевой биотехнологии и основные направления пищевой биотехнологии продуктов животного происхождения
Понятие пищевой биотехнологии и основные направления пищевой биотехнологии продуктов животного происхождения Жидкие вещества. Химия. 11 класс.
Жидкие вещества. Химия. 11 класс. Фото отчет праздников моих Звёздочек
Фото отчет праздников моих Звёздочек Животные Африки
Животные Африки Классификация химических элементов. Периодический закон
Классификация химических элементов. Периодический закон Приборы контроля высотного и кислородного оборудования. Требования к микроклимату в гермокабине
Приборы контроля высотного и кислородного оборудования. Требования к микроклимату в гермокабине Колыбельная песня – первая песня в жизни человека
Колыбельная песня – первая песня в жизни человека Қазақстан Республикасында тілдердің қызметі мен дамуын қамтамасыздандырудағы әрекеттері
Қазақстан Республикасында тілдердің қызметі мен дамуын қамтамасыздандырудағы әрекеттері Дидактические игры для работы по формированию мелкой моторики рук у детей младшего дошкольного возраста
Дидактические игры для работы по формированию мелкой моторики рук у детей младшего дошкольного возраста Акарозы кошек
Акарозы кошек Среднесибирское плоскогорье
Среднесибирское плоскогорье Общая психология
Общая психология Прогулка по городу Санкт-Петербург
Прогулка по городу Санкт-Петербург Тест по теме Кто хочет стать предпринимателем?
Тест по теме Кто хочет стать предпринимателем? Права иностранных граждан на землю в РФ
Права иностранных граждан на землю в РФ Урок -проект. Конструирование природных форм
Урок -проект. Конструирование природных форм Законы Ньютона. Решение задач
Законы Ньютона. Решение задач Деревянное золото
Деревянное золото Аппликация Цыплёнок
Аппликация Цыплёнок Дети войны
Дети войны