- Синтез САР

Содержание
- 2. Общие сведения о синтезе САУ и синтезе КУ Наиболее важным практическим приложением изученных вопроса ТАУ является
- 3. 2. Выбор для заданного ОУ функционально необходимых элементов УУ, источников питания и других вспомогательных устройств. Обычно
- 4. 5. Проведение динамического расчета CАУ. Основной задачей динамического расчета является синтез КУ, обеспечивающих требуемое качество переходного
- 5. Методика синтеза КУ При использовании метода ЛЧХ передаточная функция, схема и параметры искомого КУ определяются из
- 6. В зависимости от предъявляемых требований к качеству процесса управления различают три основных способа построения желаемых ЛЧХ:
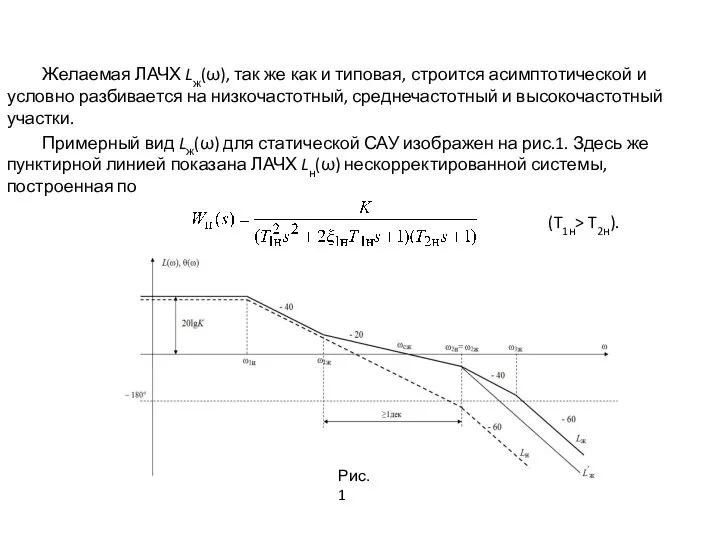
- 7. Желаемая ЛАЧХ Lж(ω), так же как и типовая, строится асимптотической и условно разбивается на низкочастотный, среднечастотный
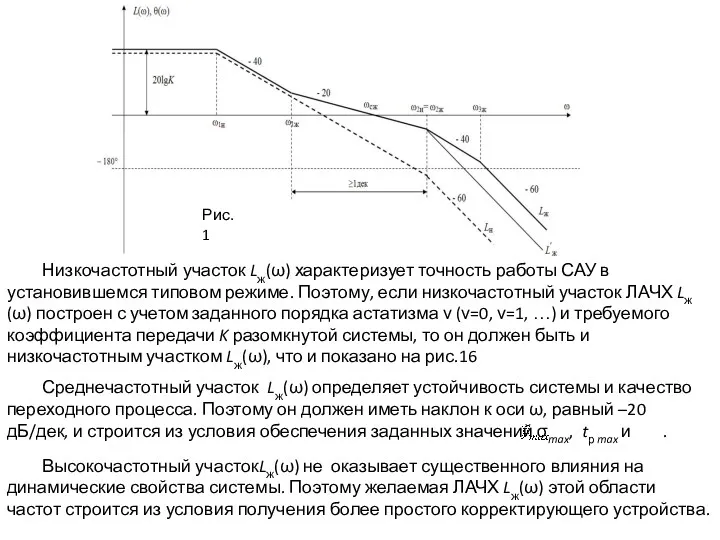
- 8. Низкочастотный участок Lж(ω) характеризует точность работы САУ в установившемся типовом режиме. Поэтому, если низкочастотный участок ЛАЧХ
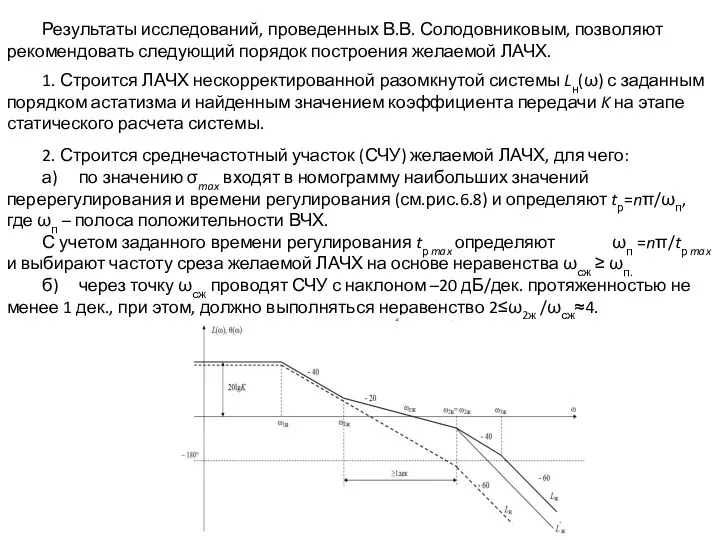
- 9. Результаты исследований, проведенных В.В. Солодовниковым, позволяют рекомендовать следующий порядок построения желаемой ЛАЧХ. 1. Строится ЛАЧХ нескорректированной
- 10. 3. Сопрягается среднечастотный участок Lж(ω) с низкочастотным участком нескорректированной системы. Это сопряжение обычно осуществляется с помощью
- 11. 4. Сопрягается среднечастотный участок Lж(ω) с высокочастотным участком Lн(ω) из условия получения наиболее простого КУ. Для
- 12. После построения желаемой ЛАЧХ приступают непосредственно к синтезу КУ, т.е. к выбору корректирующего устройства и расчету
- 13. Подставив s=jω в выражение (15), получим Wс(jω)= Wпс(jω) Wн(jω). Переходя от АФЧХ к ЛАЧХ, будем иметь
- 14. Следовательно, для получения ЛАЧХ последовательного КУ необходимо: а) построить асимптотическую ЛАЧХ Lн(ω) нескорректированной системы; в) построить
- 16. Скачать презентацию
Общие сведения о синтезе САУ и синтезе КУ
Наиболее важным практическим приложением
Общие сведения о синтезе САУ и синтезе КУ
Наиболее важным практическим приложением
2. Выбор для заданного ОУ функционально необходимых элементов УУ, источников питания
2. Выбор для заданного ОУ функционально необходимых элементов УУ, источников питания
5. Проведение динамического расчета CАУ.
Основной задачей динамического расчета является синтез КУ,
5. Проведение динамического расчета CАУ.
Основной задачей динамического расчета является синтез КУ,
Методика синтеза КУ
При использовании метода ЛЧХ передаточная функция, схема и параметры
Методика синтеза КУ
При использовании метода ЛЧХ передаточная функция, схема и параметры
В зависимости от предъявляемых требований к качеству процесса управления различают три
В зависимости от предъявляемых требований к качеству процесса управления различают три
Желаемая ЛАЧХ Lж(ω), так же как и типовая, строится асимптотической и
Желаемая ЛАЧХ Lж(ω), так же как и типовая, строится асимптотической и
Низкочастотный участок Lж(ω) характеризует точность работы САУ в установившемся типовом режиме.
Низкочастотный участок Lж(ω) характеризует точность работы САУ в установившемся типовом режиме.
Результаты исследований, проведенных В.В. Солодовниковым, позволяют рекомендовать следующий порядок построения желаемой
Результаты исследований, проведенных В.В. Солодовниковым, позволяют рекомендовать следующий порядок построения желаемой
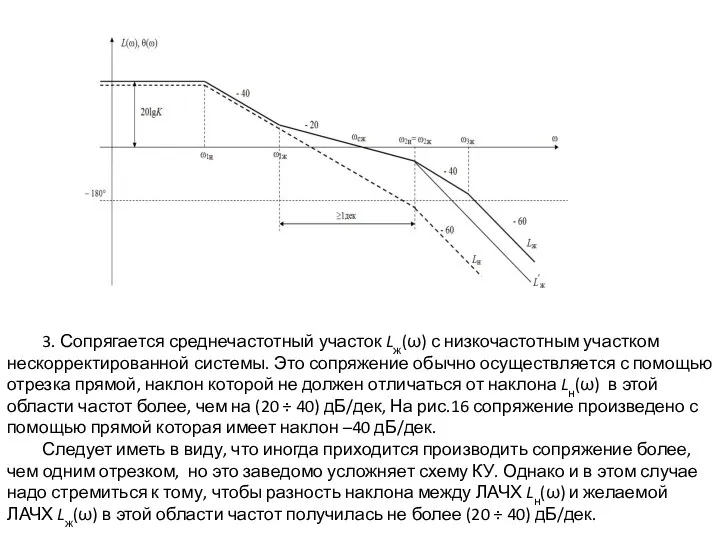
3. Сопрягается среднечастотный участок Lж(ω) с низкочастотным участком нескорректированной системы. Это
3. Сопрягается среднечастотный участок Lж(ω) с низкочастотным участком нескорректированной системы. Это
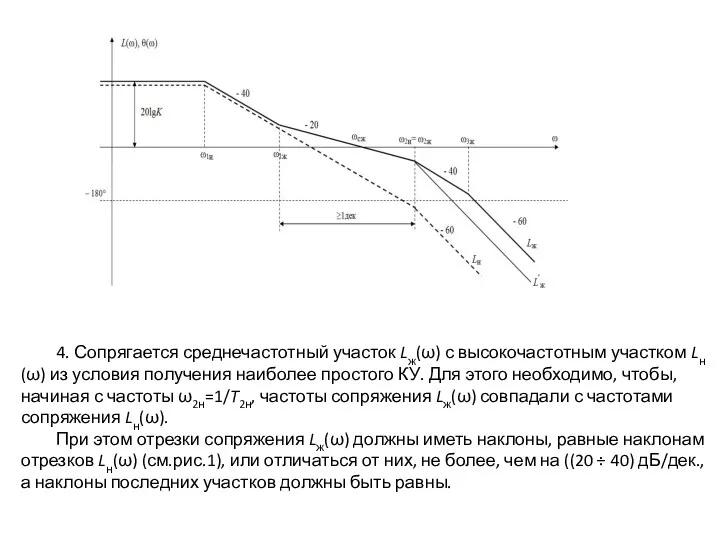
4. Сопрягается среднечастотный участок Lж(ω) с высокочастотным участком Lн(ω) из условия
4. Сопрягается среднечастотный участок Lж(ω) с высокочастотным участком Lн(ω) из условия
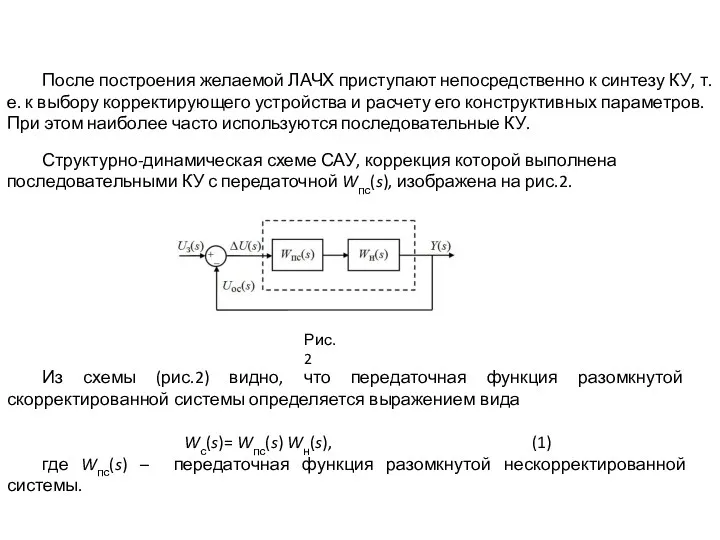
После построения желаемой ЛАЧХ приступают непосредственно к синтезу КУ, т.е. к
После построения желаемой ЛАЧХ приступают непосредственно к синтезу КУ, т.е. к
Подставив s=jω в выражение (15), получим
Wс(jω)= Wпс(jω) Wн(jω).
Переходя от АФЧХ к
Подставив s=jω в выражение (15), получим
Wс(jω)= Wпс(jω) Wн(jω).
Переходя от АФЧХ к
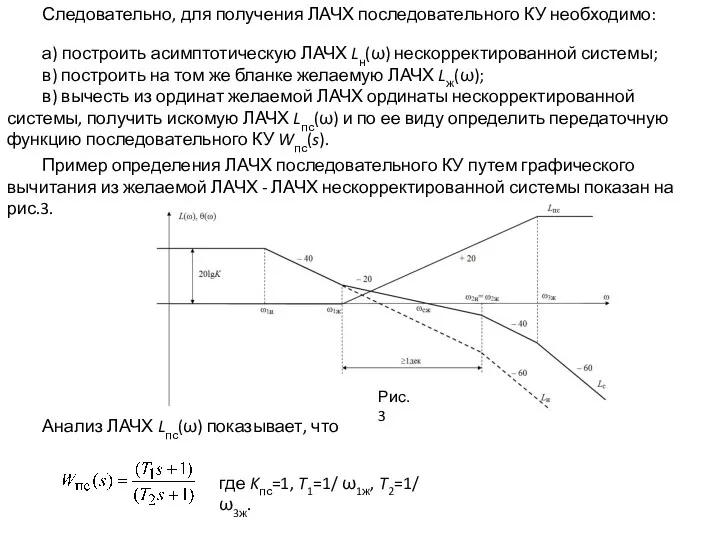
Следовательно, для получения ЛАЧХ последовательного КУ необходимо:
а) построить асимптотическую ЛАЧХ Lн(ω)
Следовательно, для получения ЛАЧХ последовательного КУ необходимо:
а) построить асимптотическую ЛАЧХ Lн(ω)
 Повторение пройденного.(3 класс).Урок№16
Повторение пройденного.(3 класс).Урок№16 Деловая игра для логопедов Логопедическая мозаика
Деловая игра для логопедов Логопедическая мозаика Чудо-книжки – чудо-детям. Книжки Холли Вебб
Чудо-книжки – чудо-детям. Книжки Холли Вебб Умный дом
Умный дом Агрессивные дети
Агрессивные дети Мотивация отдела продаж на апрель 2018
Мотивация отдела продаж на апрель 2018 20231026_zhivotnyy_organizm_i_ego_osobennosti
20231026_zhivotnyy_organizm_i_ego_osobennosti презентация проекта Большая книга сказок
презентация проекта Большая книга сказок Родительское собрание на тему:Выполняем домашние задания
Родительское собрание на тему:Выполняем домашние задания Природа. Оболочки Земли
Природа. Оболочки Земли Диагностика и лечение осложнений после вакцинации BCG
Диагностика и лечение осложнений после вакцинации BCG Физминутка на три минутки
Физминутка на три минутки Коллективизация в Казахстане
Коллективизация в Казахстане Кесарево сечение
Кесарево сечение Вязание крючком
Вязание крючком Европейский Союз
Европейский Союз Промышленные предприятия Витебской области
Промышленные предприятия Витебской области Бальный танец в XX веке
Бальный танец в XX веке Презентация по сенсорике на 1 категорию
Презентация по сенсорике на 1 категорию Школьникам о коррупции. Презентация к Всемирному Дню борьбы с коррупцией.
Школьникам о коррупции. Презентация к Всемирному Дню борьбы с коррупцией.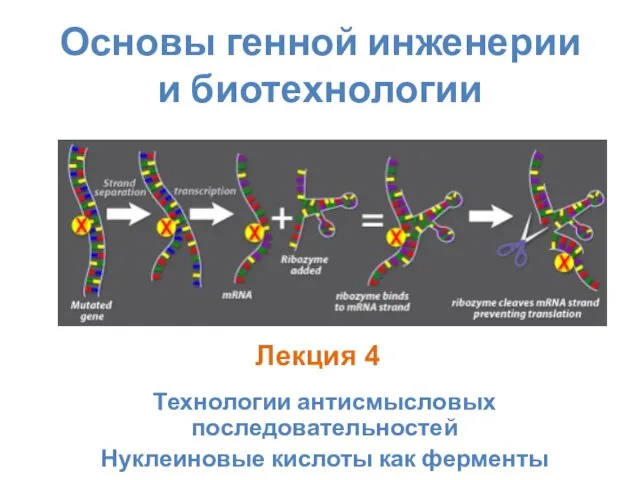 Основы генной инженерии и биотехнологии. Лекция 4
Основы генной инженерии и биотехнологии. Лекция 4 Использование современных технологий
Использование современных технологий Электрический паяльник
Электрический паяльник Цвета и условные знаки физической карты России
Цвета и условные знаки физической карты России Жак Анри Лартиг. Портрет Рене Перль
Жак Анри Лартиг. Портрет Рене Перль През. Доначисление платы ноябрь 2019
През. Доначисление платы ноябрь 2019 Технология ремонта неисправностей и диагностика тостера
Технология ремонта неисправностей и диагностика тостера классный час Моя малая Родина
классный час Моя малая Родина