- Создание робота-разведчика на основе конструктора LEGO Mindstorms

Содержание
- 2. План проекта 1. Введение 2. Актуальность 3. Цель проекта 4. Задачи проекта 5. Методы 6. Этапы
- 3. Введение На протяжении многих веков люди изобретают механизмы и машины, способные облегчить нашу жизнь, и современный
- 4. Актуальность Необходимость развития в Российской Федерации наукоемких технологий, создания высокотехнологичных производств ставит перед дополнительным образованием задачи
- 5. Цель проекта Создание прототипа робота на аппаратной платформе LEGO Mindstorms, анализ работоспособности системы в автономном режиме.
- 6. Задачи Изучение принципа строения и работы робота на основе конструктора Mindstorms EV3; Конструирование робота на основе
- 7. Методы Теоретический: разработка макета, использование интернет-ресурсов, изучение параметров работы подобных роботов. Практический: сборка макета, работа с
- 8. Этапы 1. Сборка механической части робота-исследователя; 2. Сборка электронной части робота-исследователя; 3. Работа с макетом, анализ
- 9. Реализация С использованием аппаратной платформы LEGO Mindstorms, модуля камеры, механического манипулятора создание многофункционального робота-разведчика.
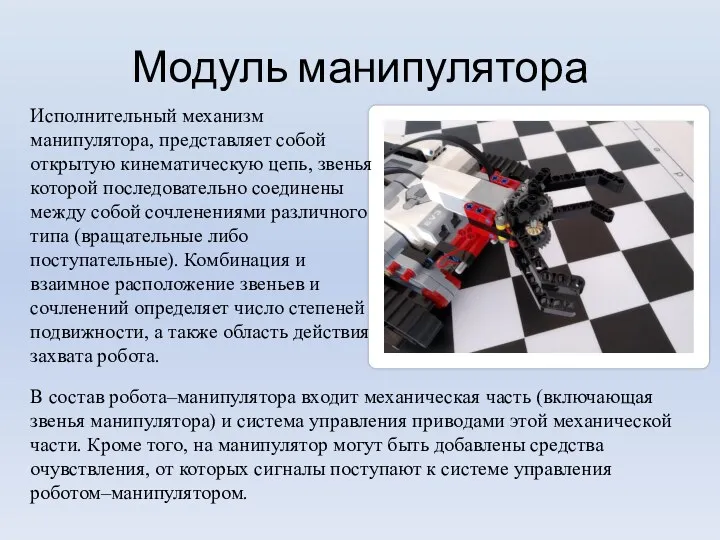
- 10. Модуль манипулятора Исполнительный механизм манипулятора, представляет собой открытую кинематическую цепь, звенья которой последовательно соединены между собой
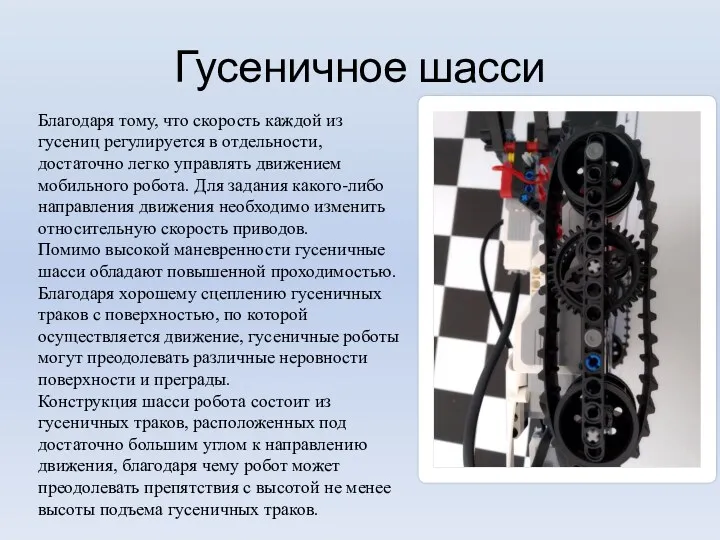
- 11. Гусеничное шасси Благодаря тому, что скорость каждой из гусениц регулируется в отдельности, достаточно легко управлять движением
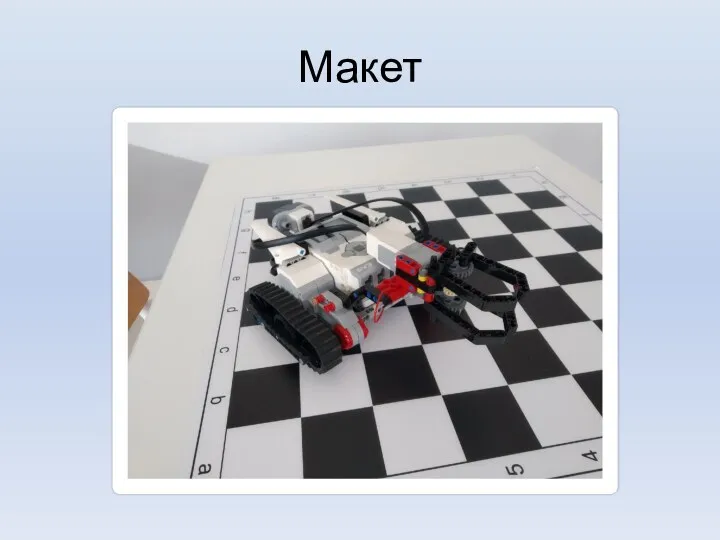
- 12. Макет
- 13. Макет
- 14. Макет
- 15. Ожидаемый результат Ожидаемым результатом работы является функционирующая в автономном режиме сборка, транслирующая изображение с камеры в
- 16. Итоги Сконструированная мной роботизированная машинка после загруженной в неё программы, выполнила все действия, согласно изложенным условиям.
- 18. Скачать презентацию
План проекта
1. Введение
2. Актуальность
3. Цель проекта
4. Задачи проекта
5. Методы
6. Этапы
7. Реализация
8.
План проекта
1. Введение
2. Актуальность
3. Цель проекта
4. Задачи проекта
5. Методы
6. Этапы
7. Реализация
8.
Введение
На протяжении многих веков люди изобретают механизмы и машины, способные облегчить
Введение
На протяжении многих веков люди изобретают механизмы и машины, способные облегчить
Актуальность
Необходимость развития в Российской Федерации наукоемких технологий, создания высокотехнологичных производств ставит
Актуальность
Необходимость развития в Российской Федерации наукоемких технологий, создания высокотехнологичных производств ставит
Цель проекта
Создание прототипа робота на аппаратной платформе LEGO Mindstorms, анализ работоспособности
Цель проекта
Создание прототипа робота на аппаратной платформе LEGO Mindstorms, анализ работоспособности
Задачи
Изучение принципа строения и работы робота на основе конструктора Mindstorms EV3;
Конструирование
Задачи
Изучение принципа строения и работы робота на основе конструктора Mindstorms EV3;
Конструирование
Методы
Теоретический: разработка макета, использование интернет-ресурсов, изучение параметров работы подобных роботов.
Практический: сборка
Методы
Теоретический: разработка макета, использование интернет-ресурсов, изучение параметров работы подобных роботов.
Практический: сборка
Этапы
1. Сборка механической части робота-исследователя;
2. Сборка электронной части робота-исследователя;
3. Работа с
Этапы
1. Сборка механической части робота-исследователя;
2. Сборка электронной части робота-исследователя;
3. Работа с
Реализация
С использованием аппаратной платформы LEGO Mindstorms, модуля камеры, механического манипулятора создание
Реализация
С использованием аппаратной платформы LEGO Mindstorms, модуля камеры, механического манипулятора создание
Модуль манипулятора
Исполнительный механизм манипулятора, представляет собой открытую кинематическую цепь, звенья которой
Модуль манипулятора
Исполнительный механизм манипулятора, представляет собой открытую кинематическую цепь, звенья которой
Гусеничное шасси
Благодаря тому, что скорость каждой из гусениц регулируется в отдельности,
Гусеничное шасси
Благодаря тому, что скорость каждой из гусениц регулируется в отдельности,

Макет
Макет

Макет
Макет
Макет
Макет
Ожидаемый результат
Ожидаемым результатом работы является функционирующая в автономном режиме сборка, транслирующая
Ожидаемый результат
Ожидаемым результатом работы является функционирующая в автономном режиме сборка, транслирующая
Итоги
Сконструированная мной роботизированная машинка после загруженной в неё программы, выполнила все
Итоги
Сконструированная мной роботизированная машинка после загруженной в неё программы, выполнила все
 Ветераны Великой Отечественной войны - сотрудники САФУ
Ветераны Великой Отечественной войны - сотрудники САФУ презентация к статье Использование технологии критического мышления на уроках чтения и окружающего мира.
презентация к статье Использование технологии критического мышления на уроках чтения и окружающего мира. Подготовка кадрового состава для организаций отдыха и оздоровления детей в условиях педагогического вуза
Подготовка кадрового состава для организаций отдыха и оздоровления детей в условиях педагогического вуза 6.4. Системы управления оборудованием ТЗА
6.4. Системы управления оборудованием ТЗА Художественная культура России в XVIII веке
Художественная культура России в XVIII веке Роль медицинской сестры в охране репродуктивного здоровья и планирования семьи
Роль медицинской сестры в охране репродуктивного здоровья и планирования семьи Отдел продаж Skoda. Итоги за март 2018 года
Отдел продаж Skoda. Итоги за март 2018 года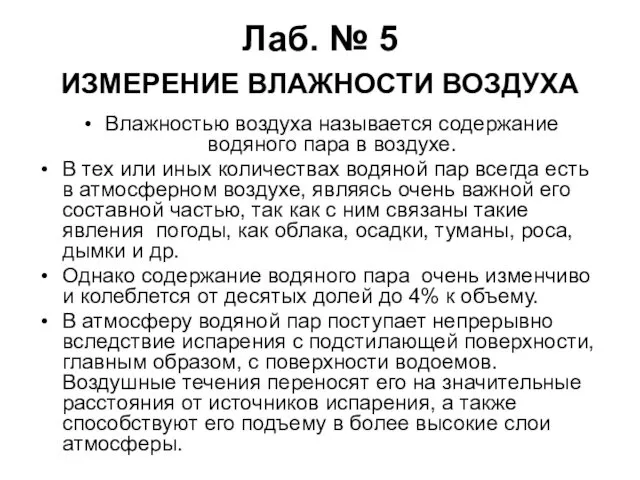 Измерение влажности воздуха
Измерение влажности воздуха Тибетский тест личности
Тибетский тест личности Дербес компьютер. Компьютердің құрылысы
Дербес компьютер. Компьютердің құрылысы Закят: очищение имущества и залог процветания общества
Закят: очищение имущества и залог процветания общества День знаний для 2 класса.
День знаний для 2 класса. Компетенция в процессе обучения
Компетенция в процессе обучения Образование, наука, техника и технологии. Методы научного познания
Образование, наука, техника и технологии. Методы научного познания Строительные грузы и их транспортировка
Строительные грузы и их транспортировка Александр II Освободитель 1855-1881
Александр II Освободитель 1855-1881 Нобелевская премия
Нобелевская премия Пи́ттсбург Пи́нгвинз— профессиональный хоккейный клуб
Пи́ттсбург Пи́нгвинз— профессиональный хоккейный клуб Основные виды дефектов, причины и способы их устранения
Основные виды дефектов, причины и способы их устранения Что такое текст? 5 класс
Что такое текст? 5 класс Проектирование цифровых устройств на ПЛИС
Проектирование цифровых устройств на ПЛИС Основные положения и принципы клинической эпидемиологии, связь клинической эпидемиологии с биостатистикой
Основные положения и принципы клинической эпидемиологии, связь клинической эпидемиологии с биостатистикой Ингибиторы протонной помпы
Ингибиторы протонной помпы Использование русских народных и шумовых инструментов на праздниках и развлечениях в ДОУ.
Использование русских народных и шумовых инструментов на праздниках и развлечениях в ДОУ. Количество вещества, число Авогадро, молярная масса, молярный объём, уравнение связи
Количество вещества, число Авогадро, молярная масса, молярный объём, уравнение связи Погрузчики. Виды погрузчиков
Погрузчики. Виды погрузчиков Краудфандинг - народное финансирование
Краудфандинг - народное финансирование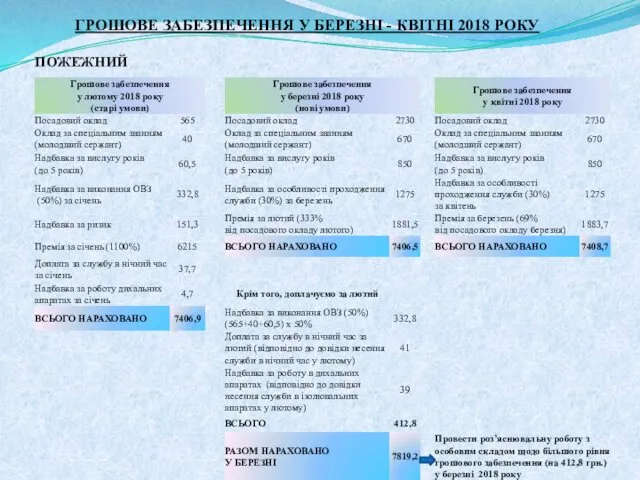 Грошове забезпечення у березні - квітні 2018 року
Грошове забезпечення у березні - квітні 2018 року