- Теория сборочных размерных цепей

Содержание
- 2. Теория сборочных размерных цепей (Галкин М.Г) ПРАКТИКА РАЗМЕРНОГО МОДЕЛИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ МЕТОДА РЕГУЛИРОВАНИЯ СПОСОБОМ НА МАКСИМУМ-МИНИМУМ
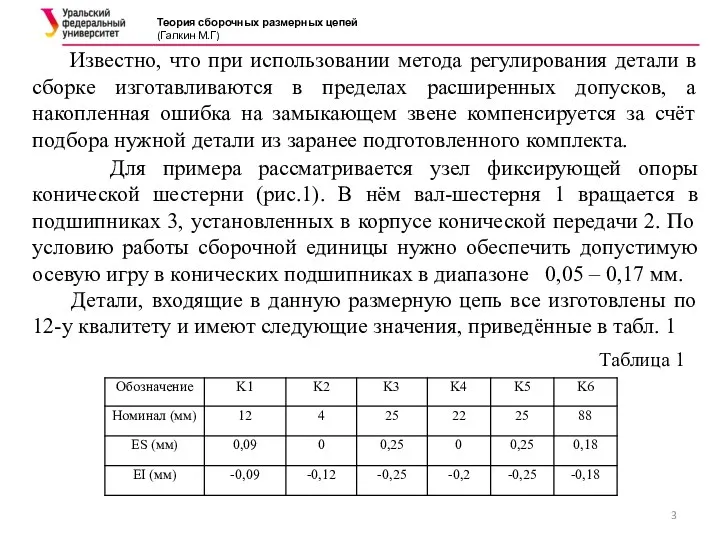
- 3. Теория сборочных размерных цепей (Галкин М.Г) Известно, что при использовании метода регулирования детали в сборке изготавливаются
- 4. Теория сборочных размерных цепей (Галкин М.Г) Рис. 1. Сборочная единица конической передачи
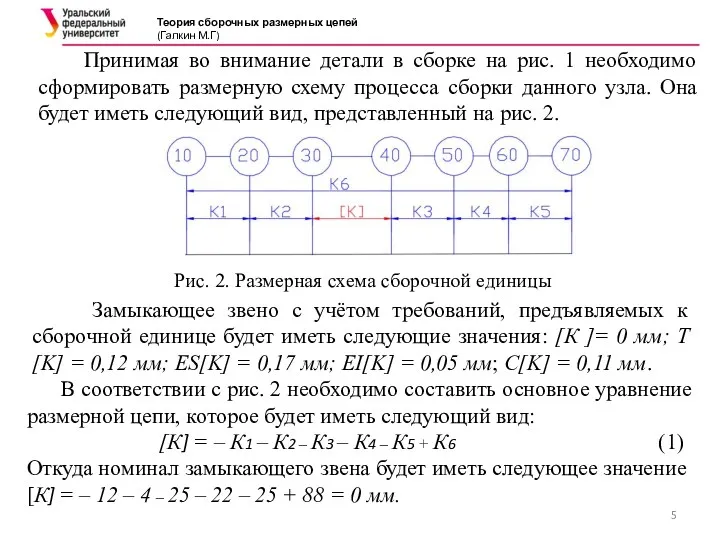
- 5. Теория сборочных размерных цепей (Галкин М.Г) Принимая во внимание детали в сборке на рис. 1 необходимо
- 6. Теория сборочных размерных цепей (Галкин М.Г) Для аргументации выбранного метода достижения точности замыкающего звена нужно определить
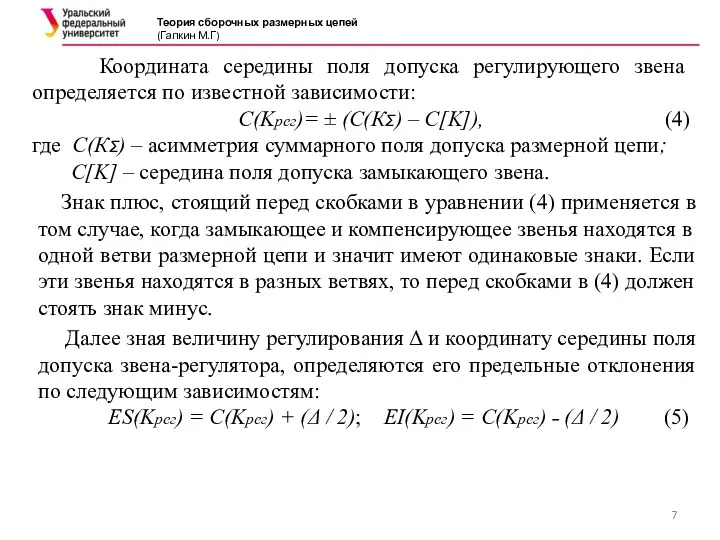
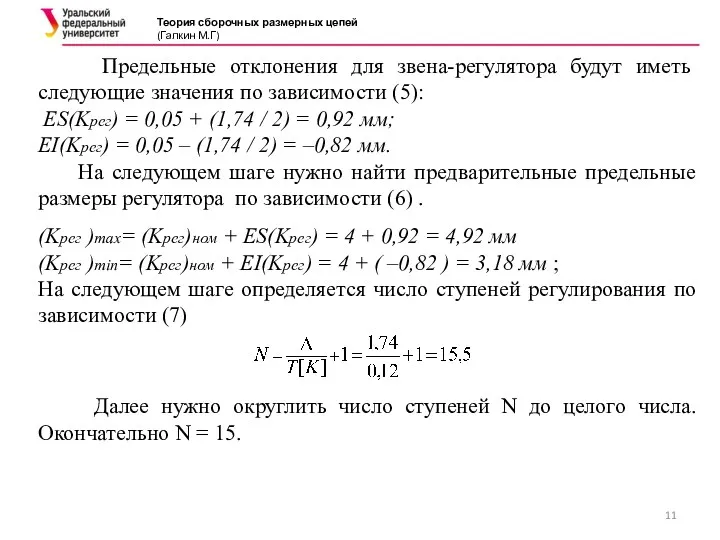
- 7. Теория сборочных размерных цепей (Галкин М.Г) Координата середины поля допуска регулирующего звена определяется по известной зависимости:
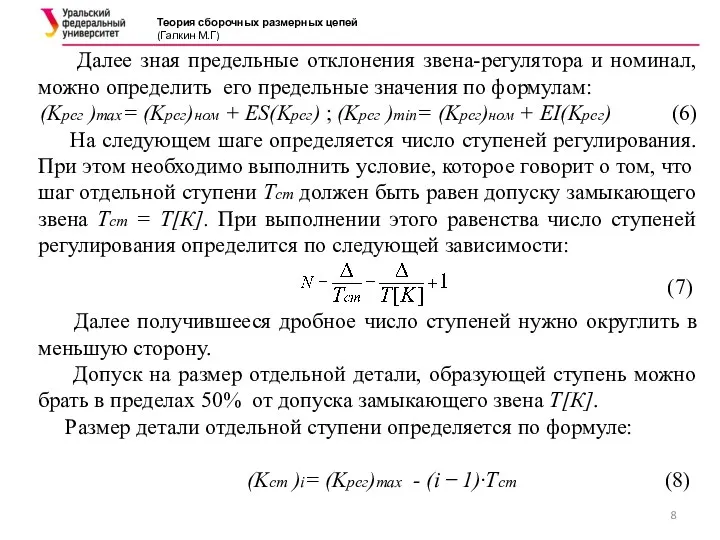
- 8. Теория сборочных размерных цепей (Галкин М.Г) Далее зная предельные отклонения звена-регулятора и номинал, можно определить его
- 9. Далее рассматривается пример решения задачи с использованием метода регулирования для обеспечения точности замыкающего звена, для сборочной
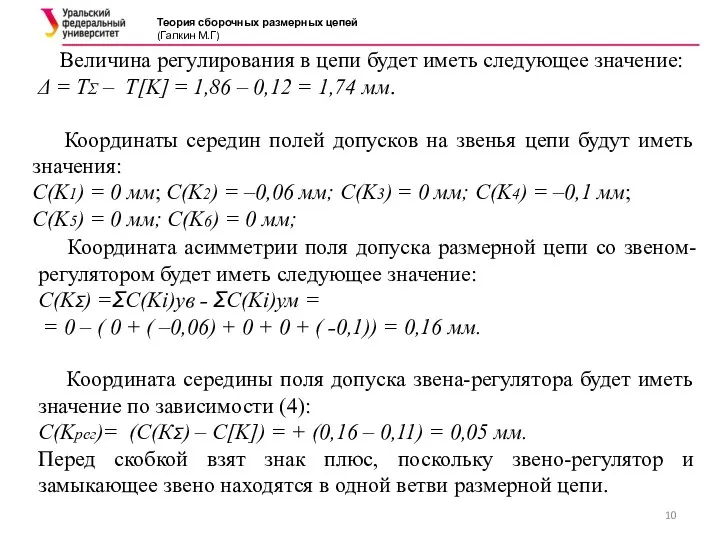
- 10. Теория сборочных размерных цепей (Галкин М.Г) Величина регулирования в цепи будет иметь следующее значение: Δ =
- 11. Теория сборочных размерных цепей (Галкин М.Г) Предельные отклонения для звена-регулятора будут иметь следующие значения по зависимости
- 13. Скачать презентацию
Теория сборочных размерных цепей (Галкин М.Г)
ПРАКТИКА РАЗМЕРНОГО МОДЕЛИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ МЕТОДА
Теория сборочных размерных цепей (Галкин М.Г)
ПРАКТИКА РАЗМЕРНОГО МОДЕЛИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ МЕТОДА
Теория сборочных размерных цепей (Галкин М.Г)
Известно, что при использовании метода
Теория сборочных размерных цепей (Галкин М.Г)
Известно, что при использовании метода

Теория сборочных размерных цепей (Галкин М.Г)
Рис. 1. Сборочная единица конической передачи
Теория сборочных размерных цепей (Галкин М.Г)
Рис. 1. Сборочная единица конической передачи
Теория сборочных размерных цепей (Галкин М.Г)
Принимая во внимание детали в
Теория сборочных размерных цепей (Галкин М.Г)
Принимая во внимание детали в
Теория сборочных размерных цепей (Галкин М.Г)
Для аргументации выбранного метода достижения
Теория сборочных размерных цепей (Галкин М.Г)
Для аргументации выбранного метода достижения
Теория сборочных размерных цепей (Галкин М.Г)
Координата середины поля допуска регулирующего
Теория сборочных размерных цепей (Галкин М.Г)
Координата середины поля допуска регулирующего
Теория сборочных размерных цепей (Галкин М.Г)
Далее зная предельные отклонения звена-регулятора
Теория сборочных размерных цепей (Галкин М.Г)
Далее зная предельные отклонения звена-регулятора
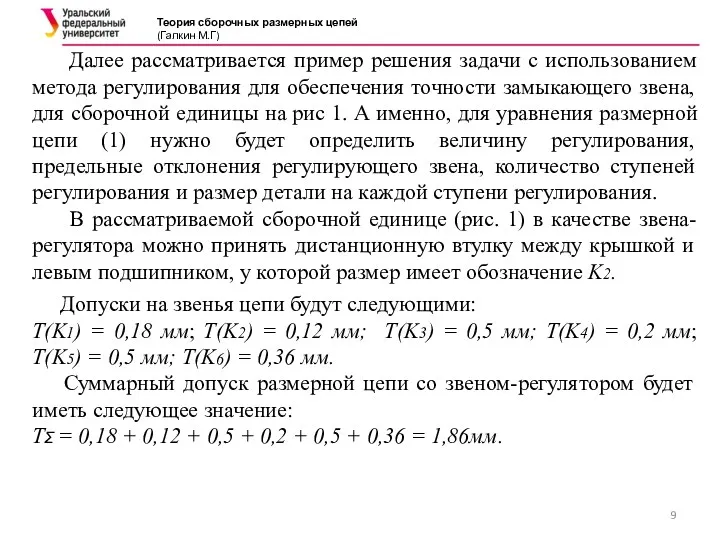
Далее рассматривается пример решения задачи с использованием метода регулирования для
Далее рассматривается пример решения задачи с использованием метода регулирования для
Теория сборочных размерных цепей (Галкин М.Г)
Величина регулирования в цепи будет
Теория сборочных размерных цепей (Галкин М.Г)
Величина регулирования в цепи будет
Теория сборочных размерных цепей (Галкин М.Г)
Предельные отклонения для звена-регулятора будут
Теория сборочных размерных цепей (Галкин М.Г)
Предельные отклонения для звена-регулятора будут
 Открытка к Дню защитника Отечества
Открытка к Дню защитника Отечества Свойства параллельных плоскостей
Свойства параллельных плоскостей Танцы народов Кавказа
Танцы народов Кавказа Разложение многочленов на множители
Разложение многочленов на множители презентация Фронтовая тетрадь- песенник Трифонова С.И.
презентация Фронтовая тетрадь- песенник Трифонова С.И. Развитие чувства времени у детей старшего дошкольного возраста
Развитие чувства времени у детей старшего дошкольного возраста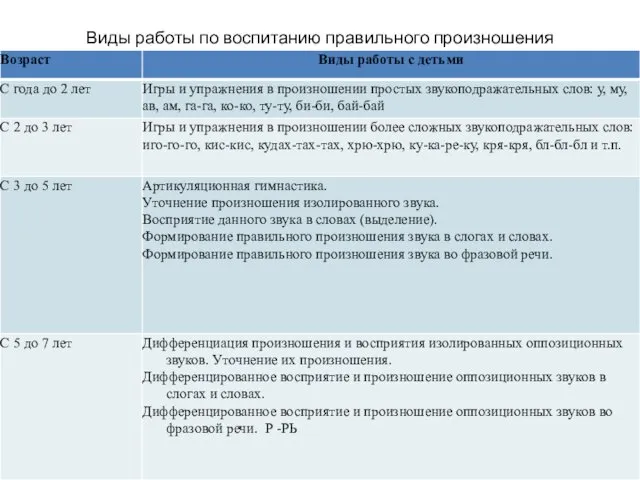 Виды работы по воспитанию правильного произношения
Виды работы по воспитанию правильного произношения Отгадай слово по первым звукам
Отгадай слово по первым звукам Реформы в 1900 – 1912 гг
Реформы в 1900 – 1912 гг Электрические трансформаторы. Расчет трансформаторов
Электрические трансформаторы. Расчет трансформаторов класс Вред
класс Вред Морфологический разбор имени существительного
Морфологический разбор имени существительного Инструктаж по ТБ и ОТ. Введение: инструктаж, знакомство
Инструктаж по ТБ и ОТ. Введение: инструктаж, знакомство Прсоединение Крыма к России
Прсоединение Крыма к России Каменный век на Кавказе
Каменный век на Кавказе Контроль за точністю руху сільськогосподарської техніки та обладнання
Контроль за точністю руху сільськогосподарської техніки та обладнання К. Паустовский Теплый хлеб
К. Паустовский Теплый хлеб Анализ работы фонда скважин Сологаевского месторождения пласта Д
Анализ работы фонда скважин Сологаевского месторождения пласта Д Мастер-класс Использование технологии развития критического мышления через чтение и письмо на примере урока чтения во 2 классе по теме В. Драгунский Заколдованная буква
Мастер-класс Использование технологии развития критического мышления через чтение и письмо на примере урока чтения во 2 классе по теме В. Драгунский Заколдованная буква Microsoft Word. Создание первого документа Word
Microsoft Word. Создание первого документа Word практические работы
практические работы Цели компании Coca-Cola
Цели компании Coca-Cola Презентация Дифференциация звуков Б-П
Презентация Дифференциация звуков Б-П مهارات الحاسب الآلي
مهارات الحاسب الآلي Презентация Петр Великий
Презентация Петр Великий Авраам Линкольн
Авраам Линкольн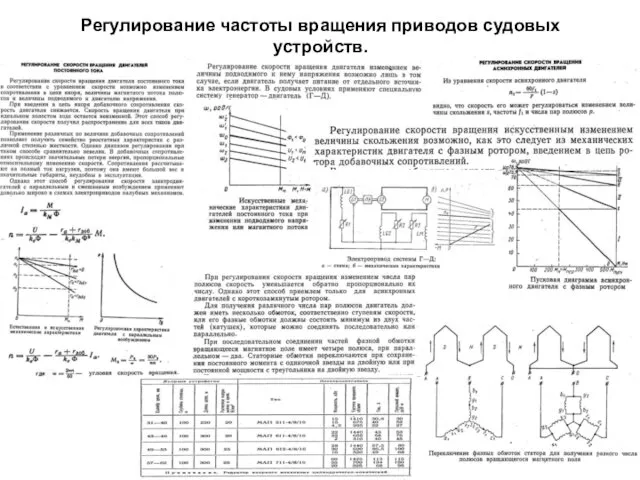 Регулирование частоты вращения приводов судовых устройств. Техническое обслуживание Дизель-генераторов. (Билет 30)
Регулирование частоты вращения приводов судовых устройств. Техническое обслуживание Дизель-генераторов. (Билет 30) Путешествие в космос
Путешествие в космос