которого задается углом поворота
Ведомые – звенья, положение которых зависит от ведущих звеньев
Кинематическая пара – соединение двух сопряженных звеньев, имеющих относительные движения между собой
Высшая кинематическая пара – имеющая соприкосновение по точке или линии
Низшая кинематическая пара – имеющая касание по площади
Кинематическая цепь – система звеньев, связанных между собой
Механизмы являются частными случаями кинематических цепей
Плоская механизмы – точки которых описывают траектории в одной плоскости

 Нанотехнология. Общие сведения об РПД
Нанотехнология. Общие сведения об РПД Материаловедение и технологии современных и перспективных материалов
Материаловедение и технологии современных и перспективных материалов Обучение физике в условиях введения ФГОС общего образования (с использованием ДОТ)
Обучение физике в условиях введения ФГОС общего образования (с использованием ДОТ) Переоценка безопасности атомной энергетики
Переоценка безопасности атомной энергетики Импульс тела. Закон сохранения импульса. 9 кл
Импульс тела. Закон сохранения импульса. 9 кл Магнитные свойства вещества
Магнитные свойства вещества Сканирлеуші зондтық микроскопия
Сканирлеуші зондтық микроскопия Структура измерительных приборов и систем
Структура измерительных приборов и систем Радиоактивность. Гипотеза об атомах
Радиоактивность. Гипотеза об атомах Трансмиссия. Коробки передач
Трансмиссия. Коробки передач Судовые двигатели
Судовые двигатели Растяжение и сжатие
Растяжение и сжатие Свет и цвет
Свет и цвет Тормозная система Lada Priora
Тормозная система Lada Priora Электрический ток в металлах. Действия электрического тока
Электрический ток в металлах. Действия электрического тока Дифракция света
Дифракция света Интерактивный учебный курс по изучению темы Оптика
Интерактивный учебный курс по изучению темы Оптика Теорема об изменении момента импульса материальной системы
Теорема об изменении момента импульса материальной системы Исследование химического состава методом микрорентгеноспектрального анализа
Исследование химического состава методом микрорентгеноспектрального анализа Электротехника и электроника
Электротехника и электроника Разработка урока с презентацией Г.Я. Мякишев, Б.Б. Буховцев, Н.Н. Сотский, 10 класс Уравнение состояния идеального газа. Газовые законы
Разработка урока с презентацией Г.Я. Мякишев, Б.Б. Буховцев, Н.Н. Сотский, 10 класс Уравнение состояния идеального газа. Газовые законы Основы электродинамики напрвляющих систем. Уравнения Максвелла
Основы электродинамики напрвляющих систем. Уравнения Максвелла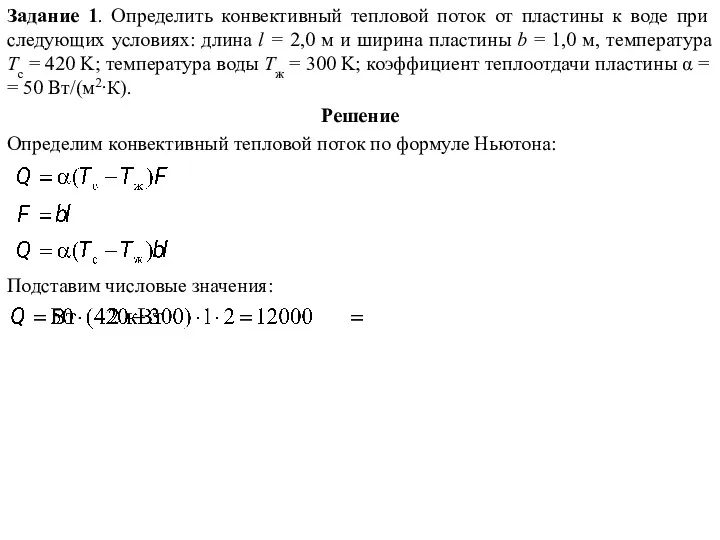 Конвективный теплообмен. Задачи
Конвективный теплообмен. Задачи МЭМС и НЭМС датчики
МЭМС и НЭМС датчики Биофизика мембранных процессов. Мембранный транспорт
Биофизика мембранных процессов. Мембранный транспорт Получение неразрывных соединений путем пайки
Получение неразрывных соединений путем пайки Колесные пары. Устройство и ремонт тепловозов
Колесные пары. Устройство и ремонт тепловозов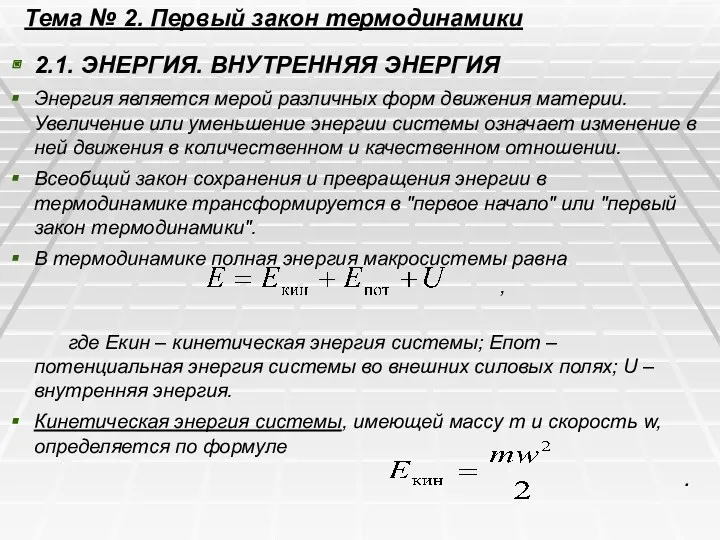 Первый закон термодинамики
Первый закон термодинамики