- Методы и алгоритмы обработки сигналов и изображений. Введение

Содержание
- 2. темы
- 3. Оценка Лабы (40%) РК (10%) Тесты на лекциях(20%) Посещение(30%)
- 4. Особенности представления и обработки сигналов и изображений в интеллектуальных системах План: Классификация методов представления информации для
- 5. Интеллект Intellectus – лат. Intelligence – англ. artificial intelligence – искусственный интеллект ИИ (AI) Искусственные Интеллектуальные
- 6. Примеры Чтение книги Собака узнает хозяина или другую собаку Росянка опознает муху Замок и ключ :-)
- 7. История Нейрофизиология и психология конец 19 века, начало 20-го века (Павлов - собака) Р.Фишер – дискриминантный
- 8. Фигуры В.М.Глушков, В.С.Михалевич, В.С.Пугачев, НП.Бусленко, Ю.И.Журавлев, Я.З.Цыпкин, А.Г.Ивахненко, М.А.Айзерман, Э.М.Браверман, М.М.Бонгард, В.Н.Вапник, Г.П.Тартаковский, В.Г.Репин, Л.А.Растригин, А.Л.Горелик
- 9. Основные цели разработки систем распознавания Освобождение человека от однообразных рутинных операций для решения других более важных
- 10. Проблемы ИИ Представление знаний Решение неформализованных задач Создание комплексных ИИ систем Интеллектуальный анализ данных Естественный язык
- 11. Направление исследований Моделирование результатов интеллектуальной деятельности – машинный интеллект Моделирование биологических систем – искусственный разум(нейрокомпьютеры): Моделирование
- 12. Плохо формализованные задачи Нет числовой формы Цель не формализована Нет алгоритма Данные неполные, неточные, неоднозначные, противоречивые
- 13. Типы знаний Факты (extensional) Законы (intensional) Глубинные Поверхностные Жесткие Мягкие
- 14. Данные и знания Внутренняя интерпретируемость Структурированность Связность Семантическая метрика Активность
- 15. Задачи ИИС Интерпретация Прогноз Диагностика Мониторинг Управление Планирование Проектирование
- 16. Задачи ИИС мягкие жесткие поверхностные глубинные управление планирование проектирование мониторинг диагностика прогноз интерпретация
- 17. Классификация ИИС Изменяемость среды Статическая Динамическая Тип представления знаний Логические и Продукционные Иерархические (сети, сценарии и
- 18. Классификация ИИС Тип вывода (способ получения ответа) Дедукция Индукция Абдукция Нейросетевой вывод
- 19. Образ не объект Описание не полностью представляет объект Описание зависит от задач Описание содержит погрешности представления
- 21. Схема обработки информации. Изображения освещение Формирование 2D изображений Формирование 3D изображений Изображение 2D Изображение 3D Преобразование
- 22. Схема обработки информации. Изображения Калибровка Выделение контуров Изображение признака Повышение качества изображения Цифровое изображение Выделение простых
- 23. Схема обработки информации. Изображения морфология Описание объекта Анализ формы Классы объектов Пиксельная или объектная классификация Изображение
- 24. Построение систем интеллектуальной обработки информации Построение признаков Селекция признаков Подавление помех Преобразование признаков Отнесение к группе
- 25. литература Методы современной и классической теории управления. Т5. - 2004 Математические методы распознавания образов. Курс лекций.
- 26. Тема 2. Задача распознавания образов как выделение характерных признаков План: Общая задача классификации. Классы. Описания классов
- 27. Задача классификации Разделить объект на 2 группы и сказать к какой из них относиться новый объект:
- 28. Класс классы - это объединения объектов (явлений), отличающиеся общими свойствами, интересующими человека. цель распознавания – принятие
- 29. Гипотеза компактности Классическая. Реализация одного и того же образа, обычно, отображается признаком пространства геометрически близкими точками.
- 30. Рабочие утверждения Необработанное представление информации увеличивает ошибку обобщения нейронной сети и время на ее обучение. Состав
- 31. Проблема Необходимо отобрать интересные составляющие описания объекта – селекция :А КАК? Необходимо определить правильное преобразование описания
- 32. Описание классов по признакам Столы для работы Столы для обеда
- 33. Описание классов структурами Столы для работы Столы для обеда столешница Боковая опора Боковая опора Ящики столешница
- 34. Описания классов вероятностное Ширина стола , м 0 0.5 1 1.5 2 x - длина стола,
- 35. Логическое описание образа Обеденный стол содержит несколько( не менее 1) ножки и немного ящиков (не более
- 36. Расстояния между объектами – object distance Метрики : Минковский (упорядоченные признаки) Меры: Хемминг (номинальные признаки) Число
- 37. Расстояние между множествами Ближний сосед Средний Дальний сосед Метрика Хаусдорфа
- 38. Датчик Преобразование внешнего мира в цифровое описание доступное компьютерной обработке Аналогво-Цифровое Преобразование – АЦП – Digitizer
- 39. Преобразование оптического сигнала
- 40. Получение пиксельного изображения Спроецированное изображение непрерывное, с гладкими границами На матрице оно дискретизируется По пространству (пиксельная
- 41. Получение изображения N – среднее число фотонов Δt – экспозиция λ=N/Δt - средний поток фотонов Пуассоновский
- 42. Шум датчика Для высокоуровневого сигнала - нормальное распределение N(Qe,√Qe) Qe – число фотонов за время экспозиции
- 43. Шум датчика общее число порождаемых зарядов Q=Q0+Qe σ2Q=σ2 Q0+σ2Qe Цифровые схемы линейны g=KQ – цифровой сигнал
- 44. Цветовая модель датчика
- 45. Типы изображений Рисунок Фотография Оптическое электронное
- 46. Чувствительность человека
- 47. Lab Яркость(L) - brightness Тон (a –зеленый-пурпурный, b – синий-желтый ) shade (a – green-purple, b
- 48. color model - RGB
- 49. RGB R G B
- 50. Формирование сигнала-изображение МИР – освещенные объекты сцены Датчик – фотосенсор АЦП Формат хранения
- 51. Схема видеоподсистемы ЭВМ
- 52. Приемники Камеры Сканеры
- 53. Типы матриц ПЗС-матрица (CCD, «Charge Coupled Device»); КМОП-матрица (CMOS, «Complementary Metal Oxide Semiconductor»); SIMD WRD (Wide
- 54. ПЗС 1 — фотоны света, прошедшие через объектив фотоаппарата; 2 — микролинза субпикселя; 3 — R
- 55. ПЗС
- 56. Размер сенсора
- 57. Методы получения цветного изображения Трёхматричные системы Матрицы с мозаичными фильтрами Фильтр Байера Матрицы с полноцветными пикселами
- 58. Глубина цвета - Depth of color Квантование цвета Число разрядов для представления цвета 1- бинарный 8-полноцветный
- 59. Геометрия оптической системы фотодатчика
- 60. Модель камеры-обскуры Модель: В преграде отверстие размеров в одну точку Все лучи проходят через одну точку
- 61. Камера-Обскура Самая Первая Камера Была известная еще Аристотелю Глубина комнаты и есть Фокусное расстояние Camera Obscura,
- 62. Идеальная камера
- 63. Модель – перспективная проекция Фокусное расстояние О Фокусное расстояние Камера-обскура Изображение позади фокуса Изображение перевернутое Модель
- 64. Модель – перспективная проекция Фокусное расстояние О Изображение формируется на картинной плоскости
- 65. Простейший случай Поместим центр системы координат в ЦП Смотрим вдоль оси z Фокусное расстояние = 1
- 66. Трехмерный вид X Y Z f O A a x y - Нелинейное преобразование (Деление на
- 67. Однородные координаты добавим дополнительную координату! Однородные координаты точки изображения Однородные координаты точки сцены Перевод из однородных
- 68. Однородные координаты Одна и та же точка изображения! Одна и та же точка сцены!
- 69. Преобразования - сдвиг и масштаб
- 70. Евклидово преобразование Переход от одного ортонормированного базиса к другому Поворот R и сдвиг T
- 71. Матричная запись проекции
- 72. Обозначим: Матрица проецирования Поэтому простейшее уравнение центральной проекции: A – точка сцены, a – проекция
- 73. Добавим фокусное расстояние Пусть фокусное расстояние = f
- 74. Матричная запись проекции
- 75. Композиция преобразований A =(X,Y,Z) O =(0,0,0) Z 1 Рассмотрим как композицию преобразований Проецирование на ретинальную плоскость
- 76. Композиция преобразований В матричном виде композиция преобразований записывается как:
- 77. A Перевод в координаты изображения Умеем проецировать А на картинную плоскость, получая а Картинная плоскость состоит
- 78. Принципиальная точка Принципиальная точка – основание перпендикуляра из ЦП на картинную плоскость В указанной системе координат
- 79. Перевод в координаты изображения Перевод в новую систему координат Масштабирование (в пикселах) Новая центр координат (сдвиг)
- 80. Матричная запись перевода в пиксели
- 81. Внутренняя калибровка Объединим масштабирование по фокусному расстоянию и перевод в пиксели Масштабирование до картинной плоскости Перевод
- 82. Внутренняя калибровка Объединим масштабирование по фокусному расстоянию и перевод в пиксели Текущее уравнение центральной проекции Внутренняя
- 83. Матрица и картинная плоскость Матрица камеры конечного размера! Картинная плоскость бесконечна При проецировании точки могут выходить
- 84. Смысл внутренней калибровки для реконструкции Есть изображение и точка на нем Как проходит луч? X Y
- 85. От пикселя к лучу X Y Z O a=(x,y) b=(u,v) O = (0,0,0), a = (x,y,1)
- 86. Мировая система координат До сих пор – система координат была связана с камерой Но А задается
- 87. Из мировой в координаты камеры Положение и ориентация камеры в мировых координатах задается евклидовым преобразованием С
- 88. Внешняя калибровка Матрица преобразования из мировой системы координат в систему координат камеры называется матрицей внешней калибровки
- 89. Полная матрица проекции Скомпонуем все наши преобразования: Из мировой системы координат в систему координат камеры Центральная
- 90. Реальная камера
- 91. Апертура – не точка! Целый пучок лучей проходит через отверстие в преграде Изображение одной точки –
- 92. Уменьшаем апертуру апертура маленькая (точка ☺) Меньше апертура – меньше света проходит При малых апертурах начинаются
- 93. Уменьшаем диафрагму
- 94. Линза! Линза позволяет использовать большую диафрагму и увеличить поток света от каждой точки
- 95. ЛИНЗА
- 96. Преломление света Луч света на стыке различных материалов преломляется Где n – коэффициент преломления, θ -
- 97. Линза F’ N N’ NN’ – главная оптическая ось, пересекающая центры сферических поверхностей Пучок параллельных прямых
- 98. Линза F’ О F’ 2F’ -F’ А B
- 99. Линза Луч, проходящий через центр линзы не преломляется! Система точно как камера-обскура, но собирает больше света!
- 100. Фокусировка Только часть объектов оказываются «в фокусе»
- 101. Пятно рассеяния Пусть матрица поставлена так, чтобы сходились лучи от объекта на расстоянии u Пучок лучей
- 102. Управление глубиной резкости Изменяя диафрагму можно изменять размер «пятен рассеяния»
- 103. Управление глубиной резкости Диафрагма управляет глубиной резкости Уменьшение диафрагмы увеличивает интервал, на котором объект находится приблизительно
- 104. Изменение глубины резкости f/2.8 Большая диафрагма = маленькая DOF f/22 Маленькая диафрагма = большая DOF
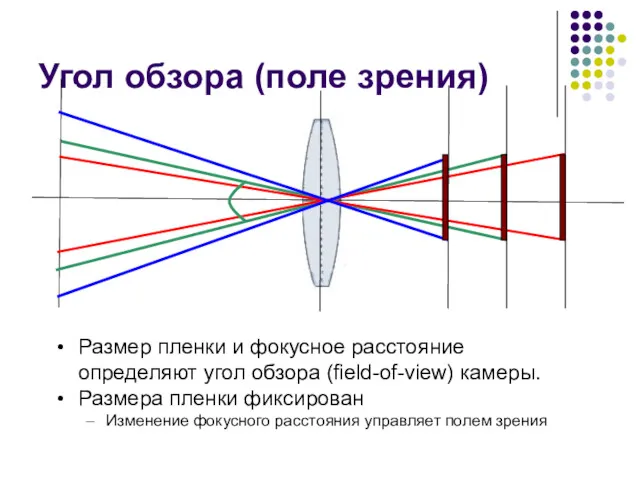
- 105. Угол обзора (поле зрения) A Размер пленки и фокусное расстояние определяют угол обзора (field-of-view) камеры. Размера
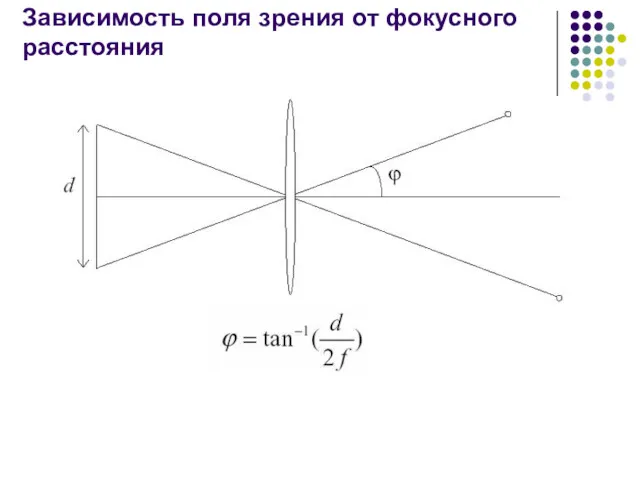
- 106. f Зависимость поля зрения от фокусного расстояния Больше фокусное расстояние – меньше угол обзора Меньше фокусное
- 107. Поле зрения и трансфокация (Zoom)
- 108. НЕДОСТАТКИ ЛИНЗ
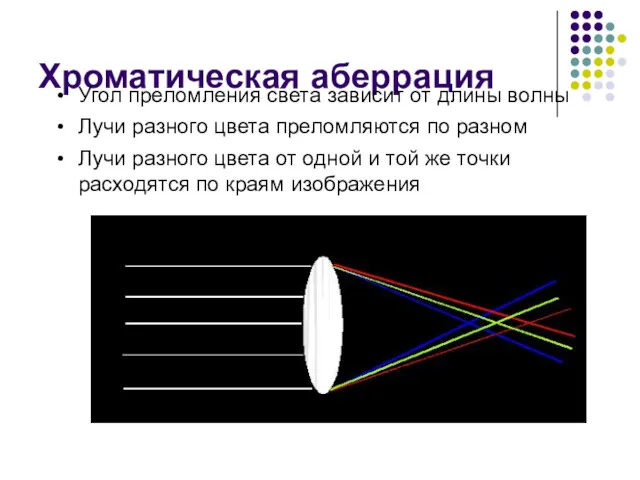
- 109. Хроматическая аберрация Угол преломления света зависит от длины волны Лучи разного цвета преломляются по разном Лучи
- 110. Хроматическая аберрация Центр изображения Край изображения
- 111. Радиальная дисторсия Прямые линии по краям изображения превращаются в кривые
- 112. Радиальная дисторсия Идеально тонких линз не бывает! Нарушается допущение sin(x) ~ x Искажения наиболее заметны по
- 113. Изображение =Сигнал Интенсивность от координаты I(x,y) ФРТ – функция рассеивания точки ОПФ – оптическая передаточная функция
- 114. ФРТ - point spread function, PSF оптическая система никогда не изображает точку в виде точки h(x,y)
- 115. Функция рассеяния точки Исходное изображение Полученное изображение 10 11 12 14 13
- 116. ФРТ - point spread function, PSF
- 117. ОПФ
- 118. Построение признаков для изображений Признаки формы Признаки порядка Признаки структуры
- 120. Скачать презентацию

темы
темы
Оценка
Лабы (40%)
РК (10%)
Тесты на лекциях(20%)
Посещение(30%)
Оценка
Лабы (40%)
РК (10%)
Тесты на лекциях(20%)
Посещение(30%)
Особенности представления и обработки сигналов и изображений в интеллектуальных системах
План:
Классификация методов
Особенности представления и обработки сигналов и изображений в интеллектуальных системах
План:
Классификация методов
Интеллект
Intellectus – лат.
Intelligence – англ.
artificial intelligence – искусственный интеллект
ИИ (AI)
Искусственные
Интеллект
Intellectus – лат.
Intelligence – англ.
artificial intelligence – искусственный интеллект
ИИ (AI)
Искусственные
Примеры
Чтение книги
Собака узнает хозяина или другую собаку
Росянка опознает муху
Замок и ключ
Примеры
Чтение книги
Собака узнает хозяина или другую собаку
Росянка опознает муху
Замок и ключ
История
Нейрофизиология и психология конец 19 века, начало 20-го века (Павлов -
История
Нейрофизиология и психология конец 19 века, начало 20-го века (Павлов -

Фигуры
В.М.Глушков,
В.С.Михалевич,
В.С.Пугачев,
НП.Бусленко,
Ю.И.Журавлев,
Я.З.Цыпкин,
А.Г.Ивахненко,
М.А.Айзерман,
Э.М.Браверман,
М.М.Бонгард,
В.Н.Вапник,
Г.П.Тартаковский,
Фигуры
В.М.Глушков,
В.С.Михалевич,
В.С.Пугачев,
НП.Бусленко,
Ю.И.Журавлев,
Я.З.Цыпкин,
А.Г.Ивахненко,
М.А.Айзерман,
Э.М.Браверман,
М.М.Бонгард,
В.Н.Вапник,
Г.П.Тартаковский,
Основные цели разработки систем распознавания
Освобождение человека от однообразных рутинных операций для
Основные цели разработки систем распознавания
Освобождение человека от однообразных рутинных операций для
Проблемы ИИ
Представление знаний
Решение неформализованных задач
Создание комплексных ИИ систем
Интеллектуальный анализ данных
Естественный язык
Проблемы ИИ
Представление знаний
Решение неформализованных задач
Создание комплексных ИИ систем
Интеллектуальный анализ данных
Естественный язык
Направление исследований
Моделирование результатов интеллектуальной деятельности – машинный интеллект
Моделирование биологических систем –
Направление исследований
Моделирование результатов интеллектуальной деятельности – машинный интеллект
Моделирование биологических систем –
Плохо формализованные задачи
Нет числовой формы
Цель не формализована
Нет алгоритма
Данные неполные, неточные, неоднозначные,
Плохо формализованные задачи
Нет числовой формы
Цель не формализована
Нет алгоритма
Данные неполные, неточные, неоднозначные,
Типы знаний
Факты (extensional)
Законы (intensional)
Глубинные
Поверхностные
Жесткие
Мягкие
Типы знаний
Факты (extensional)
Законы (intensional)
Глубинные
Поверхностные
Жесткие
Мягкие
Данные и знания
Внутренняя интерпретируемость
Структурированность
Связность
Семантическая метрика
Активность
Данные и знания
Внутренняя интерпретируемость
Структурированность
Связность
Семантическая метрика
Активность
Задачи ИИС
Интерпретация
Прогноз
Диагностика
Мониторинг
Управление
Планирование
Проектирование
Задачи ИИС
Интерпретация
Прогноз
Диагностика
Мониторинг
Управление
Планирование
Проектирование

Задачи ИИС
мягкие
жесткие
поверхностные
глубинные
управление
планирование
проектирование
мониторинг
диагностика
прогноз
интерпретация
Задачи ИИС
мягкие
жесткие
поверхностные
глубинные
управление
планирование
проектирование
мониторинг
диагностика
прогноз
интерпретация
Классификация ИИС
Изменяемость среды
Статическая
Динамическая
Тип представления знаний
Логические и Продукционные
Иерархические (сети, сценарии и фреймы)
Нечеткие
Нейросетевые
Классификация ИИС
Изменяемость среды
Статическая
Динамическая
Тип представления знаний
Логические и Продукционные
Иерархические (сети, сценарии и фреймы)
Нечеткие
Нейросетевые
Классификация ИИС
Тип вывода (способ получения ответа)
Дедукция
Индукция
Абдукция
Нейросетевой вывод
Классификация ИИС
Тип вывода (способ получения ответа)
Дедукция
Индукция
Абдукция
Нейросетевой вывод
Образ не объект
Описание не полностью представляет объект
Описание зависит от задач
Описание содержит
Образ не объект
Описание не полностью представляет объект
Описание зависит от задач
Описание содержит

Схема обработки информации. Изображения
освещение
Формирование 2D изображений
Формирование 3D изображений
Изображение 2D
Изображение 3D
Преобразование в
Схема обработки информации. Изображения
освещение
Формирование 2D изображений
Формирование 3D изображений
Изображение 2D
Изображение 3D
Преобразование в

Схема обработки информации. Изображения
Калибровка
Выделение контуров
Изображение признака
Повышение качества изображения
Цифровое изображение
Выделение простых структур
Выделение
Схема обработки информации. Изображения
Калибровка
Выделение контуров
Изображение признака
Повышение качества изображения
Цифровое изображение
Выделение простых структур
Выделение

Схема обработки информации. Изображения
морфология
Описание объекта
Анализ формы
Классы объектов
Пиксельная или объектная классификация
Изображение области
Изображение
Схема обработки информации. Изображения
морфология
Описание объекта
Анализ формы
Классы объектов
Пиксельная или объектная классификация
Изображение области
Изображение
Построение систем интеллектуальной обработки информации
Построение признаков
Селекция признаков
Подавление помех
Преобразование признаков
Отнесение к группе
Построение систем интеллектуальной обработки информации
Построение признаков
Селекция признаков
Подавление помех
Преобразование признаков
Отнесение к группе
литература
Методы современной и классической теории управления. Т5. - 2004
Математические методы
литература
Методы современной и классической теории управления. Т5. - 2004
Математические методы
Тема 2. Задача распознавания образов как выделение характерных признаков
План:
Общая задача
Тема 2. Задача распознавания образов как выделение характерных признаков
План:
Общая задача

Задача классификации
Разделить объект на 2 группы и сказать к какой из
Задача классификации
Разделить объект на 2 группы и сказать к какой из
Класс
классы - это объединения объектов (явлений), отличающиеся общими свойствами, интересующими
Класс
классы - это объединения объектов (явлений), отличающиеся общими свойствами, интересующими
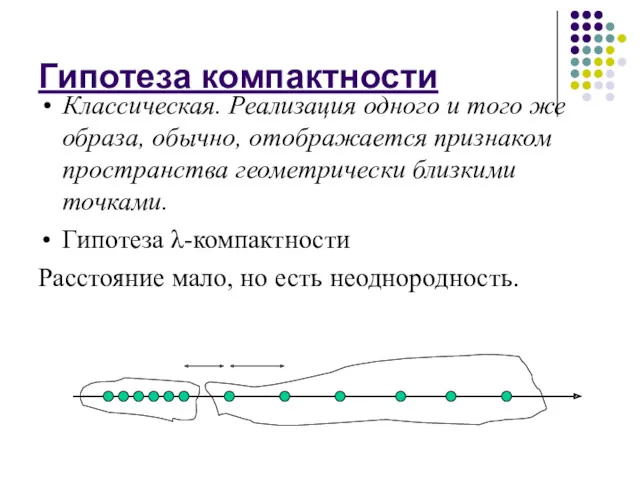
Гипотеза компактности
Классическая. Реализация одного и того же образа, обычно, отображается признаком
Гипотеза компактности
Классическая. Реализация одного и того же образа, обычно, отображается признаком
Рабочие утверждения
Необработанное представление информации увеличивает ошибку обобщения нейронной сети и время
Рабочие утверждения
Необработанное представление информации увеличивает ошибку обобщения нейронной сети и время
Проблема
Необходимо отобрать интересные составляющие описания объекта – селекция :А КАК?
Необходимо определить
Проблема
Необходимо отобрать интересные составляющие описания объекта – селекция :А КАК?
Необходимо определить
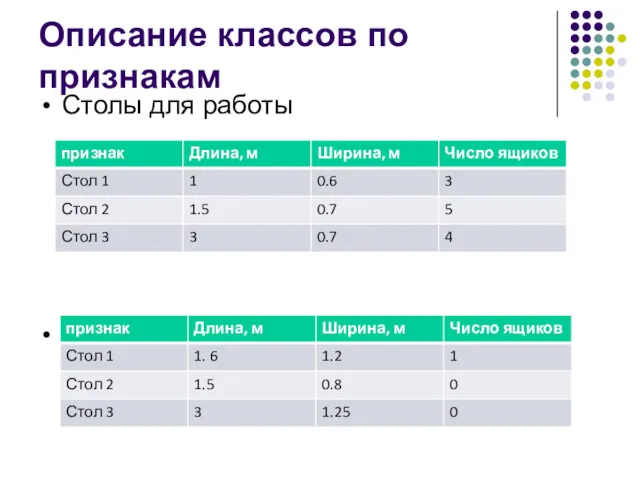
Описание классов по признакам
Столы для работы
Столы для обеда
Описание классов по признакам
Столы для работы
Столы для обеда

Описание классов структурами
Столы для работы
Столы для обеда
столешница
Боковая опора
Боковая опора
Ящики
столешница
Ножка 1
Ножка 2
Ножка
Описание классов структурами
Столы для работы
Столы для обеда
столешница
Боковая опора
Боковая опора
Ящики
столешница
Ножка 1
Ножка 2
Ножка
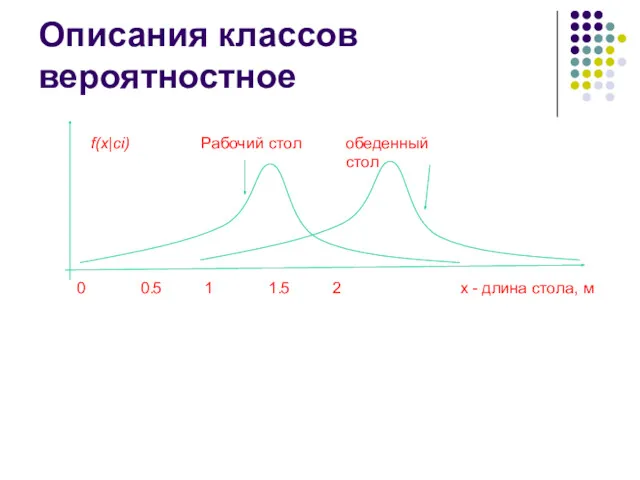
Описания классов вероятностное
Ширина стола , м
0 0.5 1 1.5 2 x - длина стола, м
Р(класс
Описания классов вероятностное
Ширина стола , м
0 0.5 1 1.5 2 x - длина стола, м
Р(класс
Логическое описание образа
Обеденный стол содержит несколько( не менее 1) ножки и
Логическое описание образа
Обеденный стол содержит несколько( не менее 1) ножки и
Расстояния между объектами – object distance
Метрики : Минковский (упорядоченные признаки)
Меры: Хемминг
Расстояния между объектами – object distance
Метрики : Минковский (упорядоченные признаки)
Меры: Хемминг
Расстояние между множествами
Ближний сосед
Средний
Дальний сосед
Метрика Хаусдорфа
Расстояние между множествами
Ближний сосед
Средний
Дальний сосед
Метрика Хаусдорфа
Датчик
Преобразование внешнего мира в цифровое описание доступное компьютерной обработке
Аналогво-Цифровое Преобразование –
Датчик
Преобразование внешнего мира в цифровое описание доступное компьютерной обработке
Аналогво-Цифровое Преобразование –
Преобразование оптического сигнала
Преобразование оптического сигнала

Получение пиксельного изображения
Спроецированное изображение непрерывное, с гладкими границами
На матрице оно дискретизируется
По
Получение пиксельного изображения
Спроецированное изображение непрерывное, с гладкими границами
На матрице оно дискретизируется
По
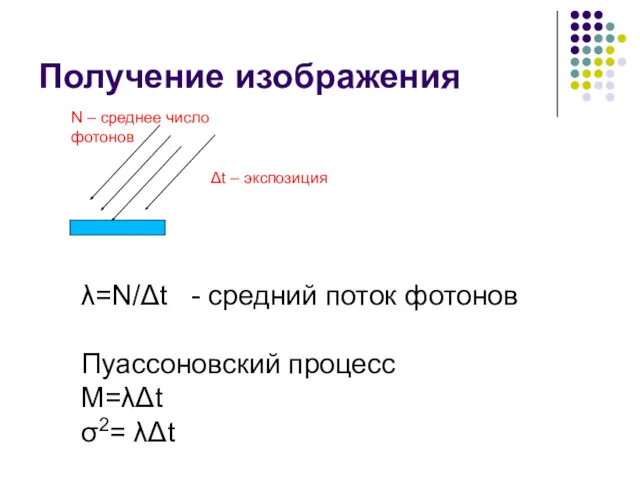
Получение изображения
N – среднее число фотонов
Δt – экспозиция
λ=N/Δt - средний поток
Получение изображения
N – среднее число фотонов
Δt – экспозиция
λ=N/Δt - средний поток
Шум датчика
Для высокоуровневого сигнала - нормальное распределение
N(Qe,√Qe)
Qe – число
Шум датчика
Для высокоуровневого сигнала - нормальное распределение
N(Qe,√Qe)
Qe – число
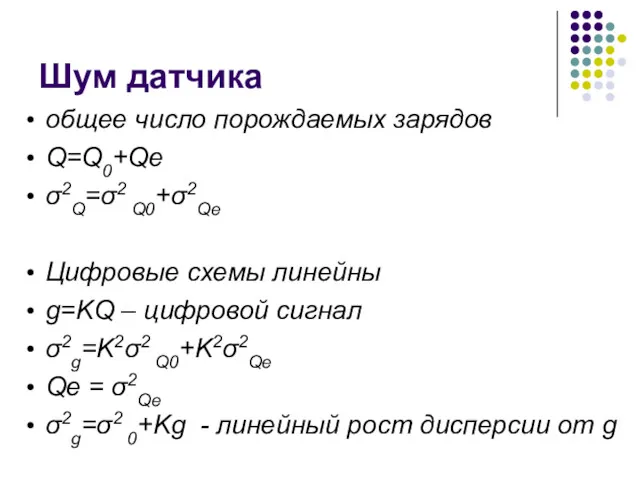
Шум датчика
общее число порождаемых зарядов
Q=Q0+Qe
σ2Q=σ2 Q0+σ2Qe
Цифровые схемы линейны
g=KQ – цифровой
Шум датчика
общее число порождаемых зарядов
Q=Q0+Qe
σ2Q=σ2 Q0+σ2Qe
Цифровые схемы линейны
g=KQ – цифровой
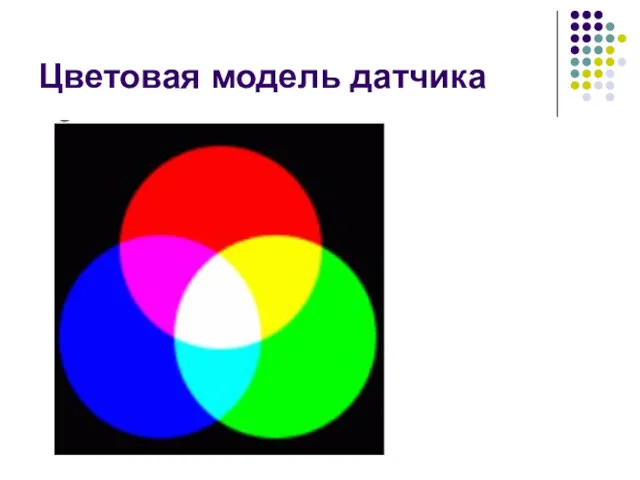
Цветовая модель датчика
Цветовая модель датчика
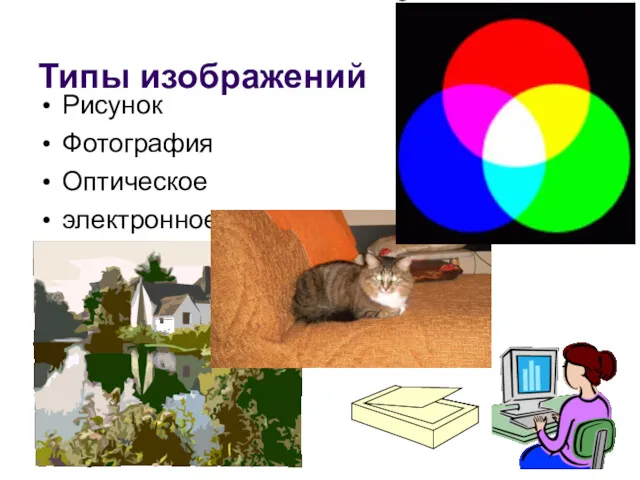
Типы изображений
Рисунок
Фотография
Оптическое
электронное
Типы изображений
Рисунок
Фотография
Оптическое
электронное
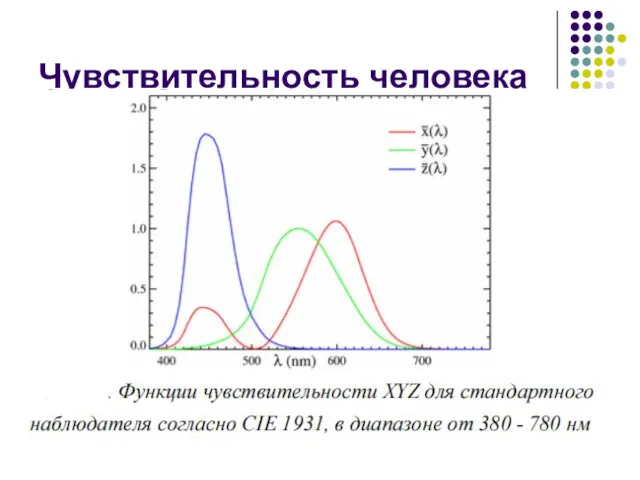
Чувствительность человека
Чувствительность человека
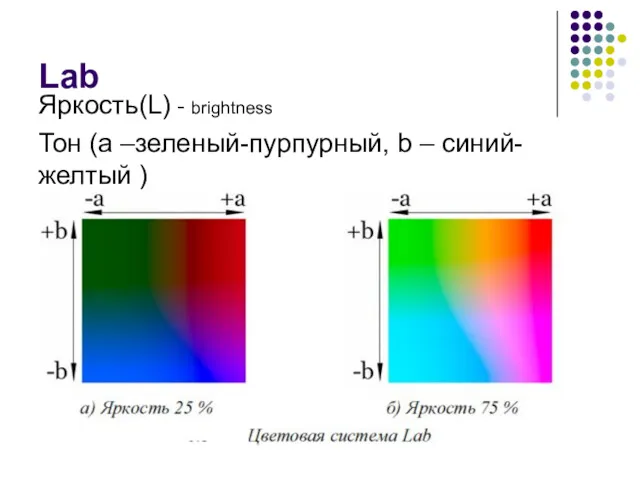
Lab
Яркость(L) - brightness
Тон (a –зеленый-пурпурный, b – синий-желтый )
shade (a –
Lab
Яркость(L) - brightness
Тон (a –зеленый-пурпурный, b – синий-желтый )
shade (a –
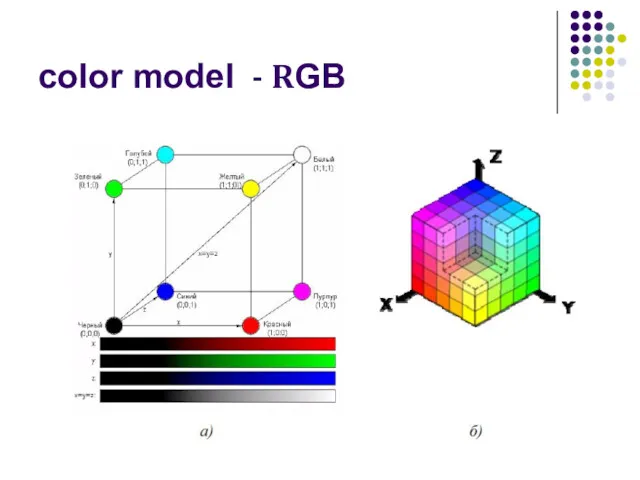
color model - RGB
color model - RGB
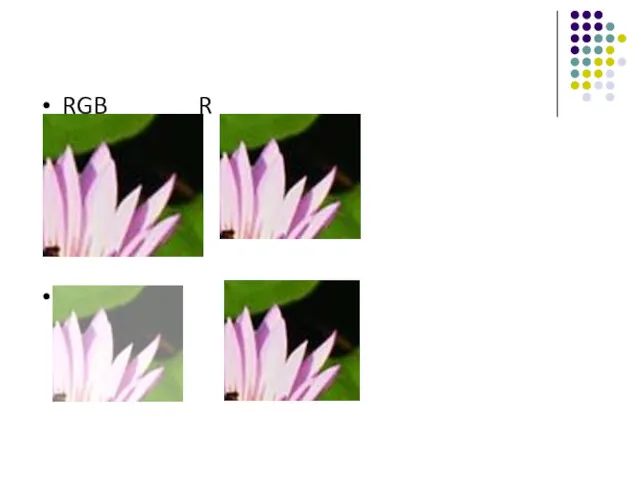
RGB R
G B
RGB R
G B
Формирование сигнала-изображение
МИР – освещенные объекты сцены
Датчик – фотосенсор
АЦП
Формат хранения
Формирование сигнала-изображение
МИР – освещенные объекты сцены
Датчик – фотосенсор
АЦП
Формат хранения
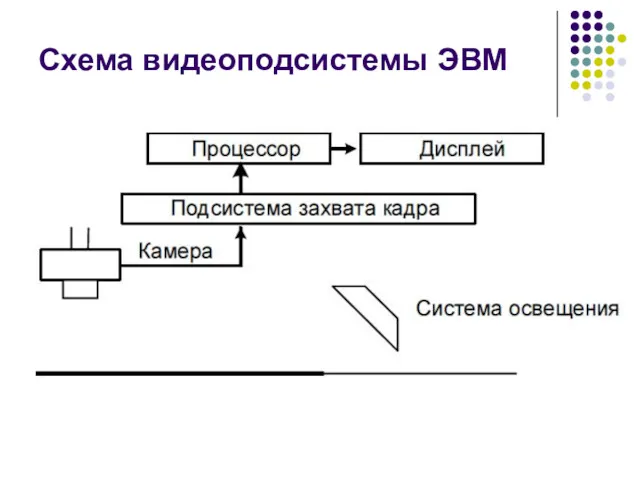
Схема видеоподсистемы ЭВМ
Схема видеоподсистемы ЭВМ

Приемники
Камеры
Сканеры
Приемники
Камеры
Сканеры
Типы матриц
ПЗС-матрица (CCD, «Charge Coupled Device»);
КМОП-матрица (CMOS, «Complementary
Типы матриц
ПЗС-матрица (CCD, «Charge Coupled Device»);
КМОП-матрица (CMOS, «Complementary
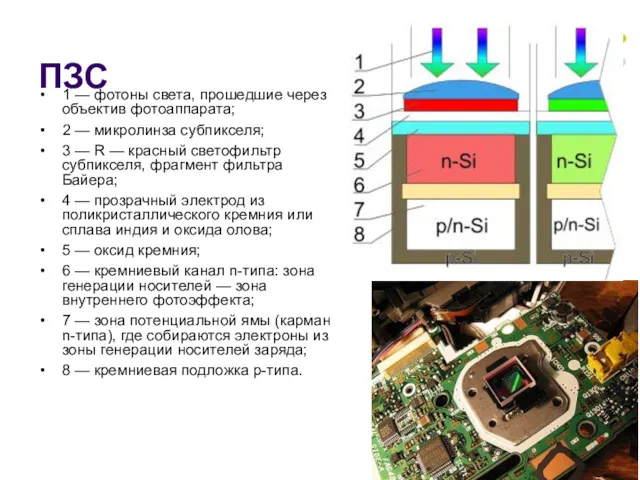
ПЗС
1 — фотоны света, прошедшие через объектив фотоаппарата;
2 — микролинза субпикселя;
3
ПЗС
1 — фотоны света, прошедшие через объектив фотоаппарата;
2 — микролинза субпикселя;
3
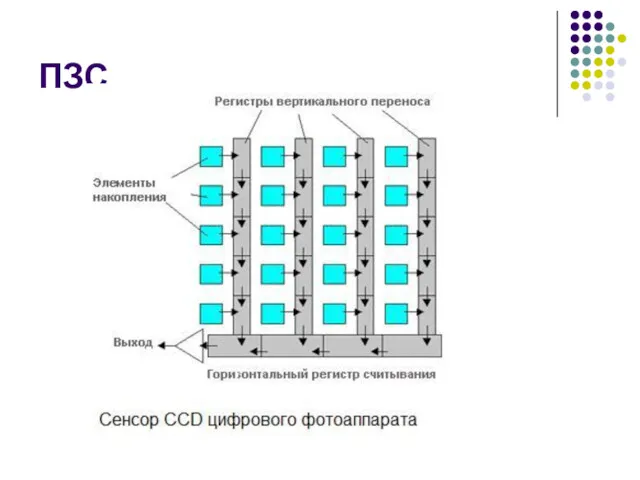
ПЗС
ПЗС

Размер сенсора
Размер сенсора

Методы получения цветного изображения
Трёхматричные системы
Матрицы с мозаичными фильтрами
Фильтр Байера
Матрицы с полноцветными
Методы получения цветного изображения
Трёхматричные системы
Матрицы с мозаичными фильтрами
Фильтр Байера
Матрицы с полноцветными
Глубина цвета - Depth of color
Квантование цвета
Число разрядов для представления цвета
1-
Глубина цвета - Depth of color
Квантование цвета
Число разрядов для представления цвета
1-
Геометрия оптической системы фотодатчика
Геометрия оптической системы фотодатчика
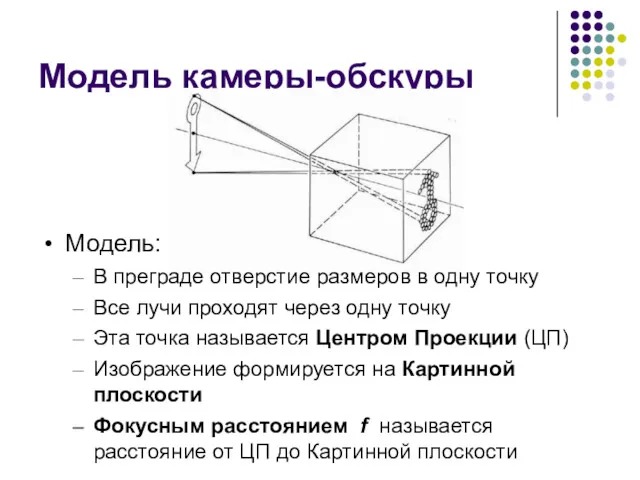
Модель камеры-обскуры
Модель:
В преграде отверстие размеров в одну точку
Все лучи проходят через
Модель камеры-обскуры
Модель:
В преграде отверстие размеров в одну точку
Все лучи проходят через
Камера-Обскура
Самая Первая Камера
Была известная еще Аристотелю
Глубина комнаты и есть Фокусное расстояние
Camera
Камера-Обскура
Самая Первая Камера
Была известная еще Аристотелю
Глубина комнаты и есть Фокусное расстояние
Camera

Идеальная камера
Идеальная камера
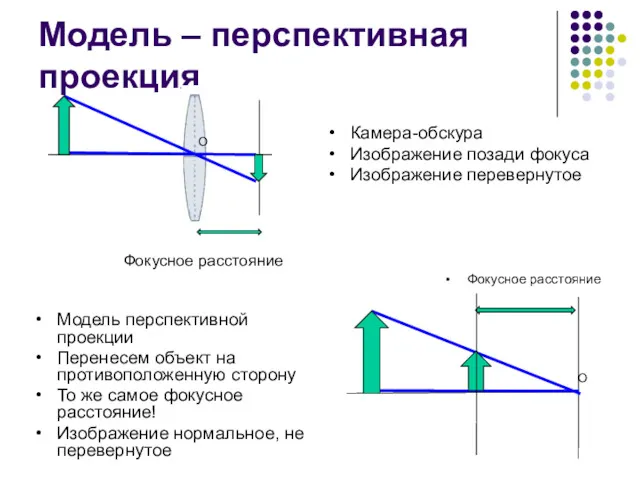
Модель – перспективная проекция
Фокусное расстояние
О
Фокусное расстояние
Камера-обскура
Изображение позади фокуса
Изображение перевернутое
Модель перспективной
Модель – перспективная проекция
Фокусное расстояние
О
Фокусное расстояние
Камера-обскура
Изображение позади фокуса
Изображение перевернутое
Модель перспективной
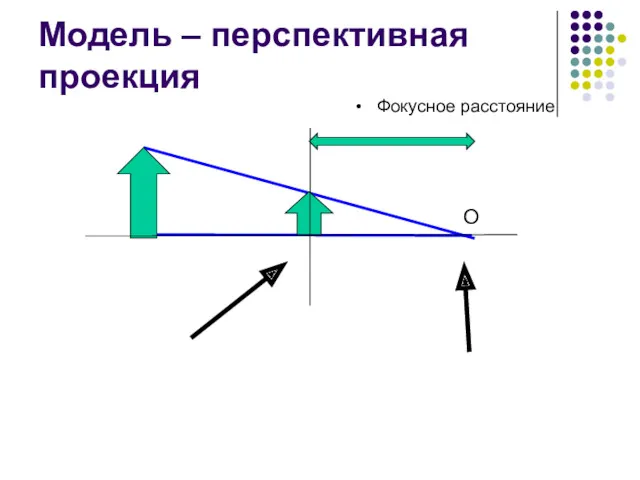
Модель – перспективная проекция
Фокусное расстояние
О
Изображение формируется на картинной плоскости
Модель – перспективная проекция
Фокусное расстояние
О
Изображение формируется на картинной плоскости
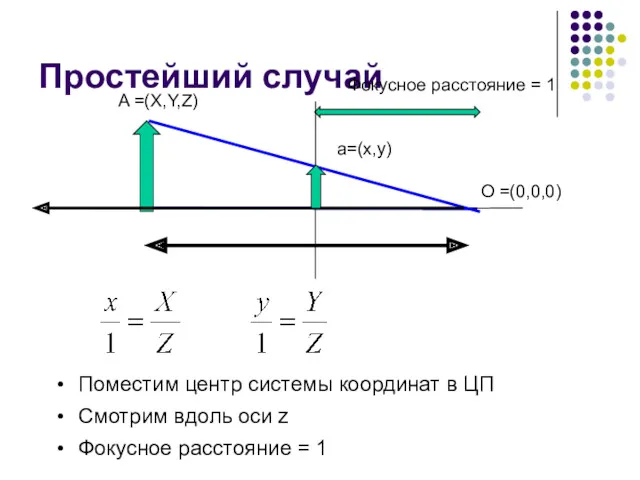
Простейший случай
Поместим центр системы координат в ЦП
Смотрим вдоль оси z
Фокусное расстояние
Простейший случай
Поместим центр системы координат в ЦП
Смотрим вдоль оси z
Фокусное расстояние
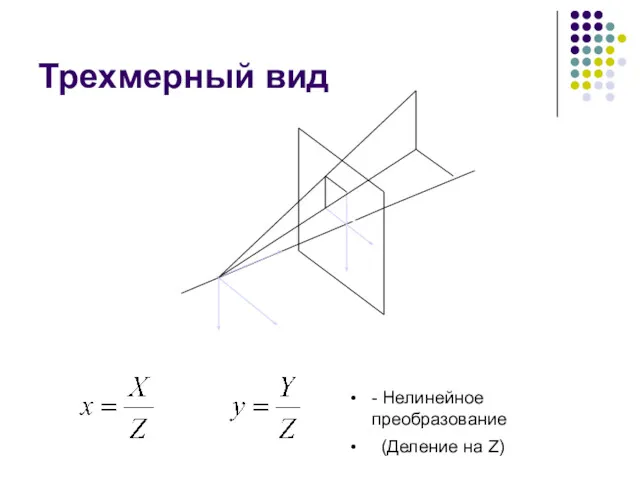
Трехмерный вид
X
Y
Z
f
O
A
a
x
y
- Нелинейное преобразование
(Деление на Z)
Трехмерный вид
X
Y
Z
f
O
A
a
x
y
- Нелинейное преобразование
(Деление на Z)
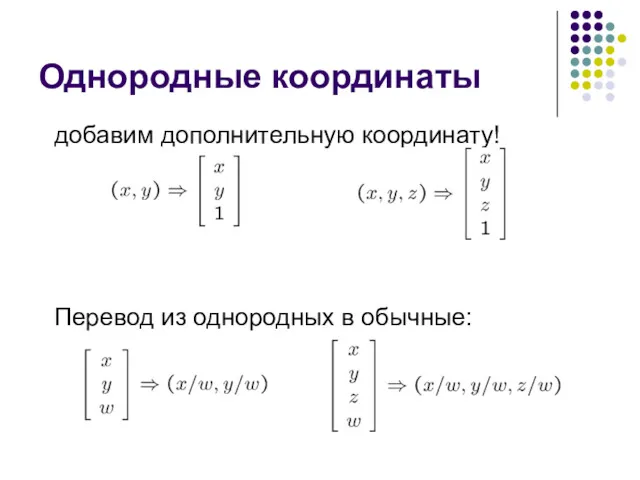
Однородные координаты
добавим дополнительную координату!
Однородные координаты
точки изображения
Однородные координаты
точки сцены
Перевод из однородных
Однородные координаты
добавим дополнительную координату!
Однородные координаты
точки изображения
Однородные координаты
точки сцены
Перевод из однородных
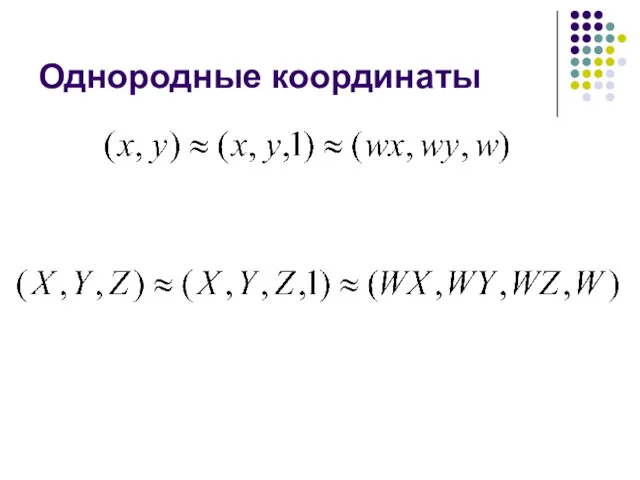
Однородные координаты
Одна и та же точка изображения!
Одна и та же точка
Однородные координаты
Одна и та же точка изображения!
Одна и та же точка
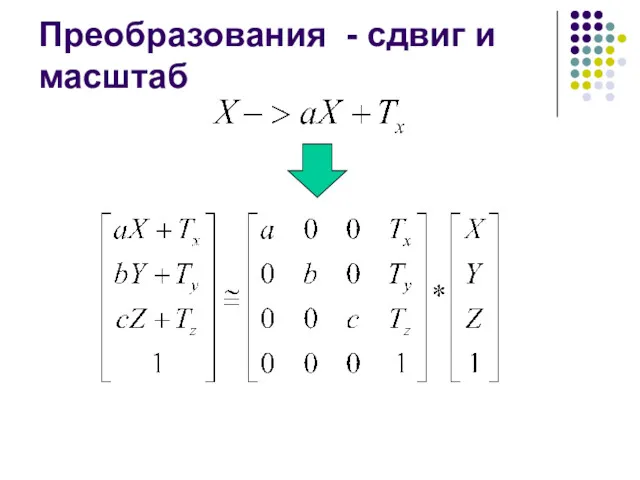
Преобразования - сдвиг и масштаб
Преобразования - сдвиг и масштаб
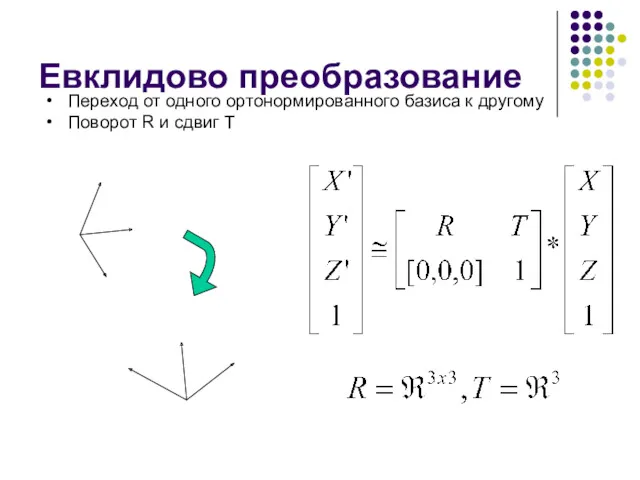
Евклидово преобразование
Переход от одного ортонормированного базиса к другому
Поворот R и сдвиг
Евклидово преобразование
Переход от одного ортонормированного базиса к другому
Поворот R и сдвиг
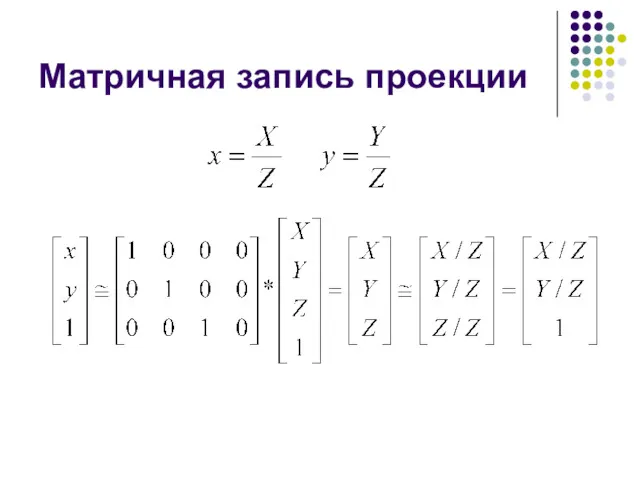
Матричная запись проекции
Матричная запись проекции
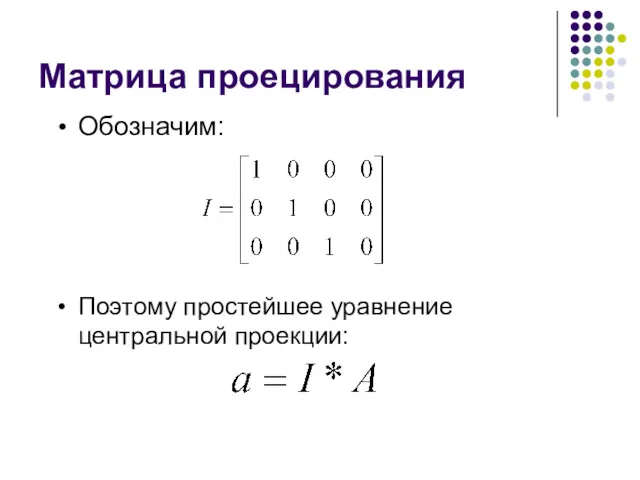
Обозначим:
Матрица проецирования
Поэтому простейшее уравнение центральной проекции:
A – точка сцены, a –
Обозначим:
Матрица проецирования
Поэтому простейшее уравнение центральной проекции:
A – точка сцены, a –
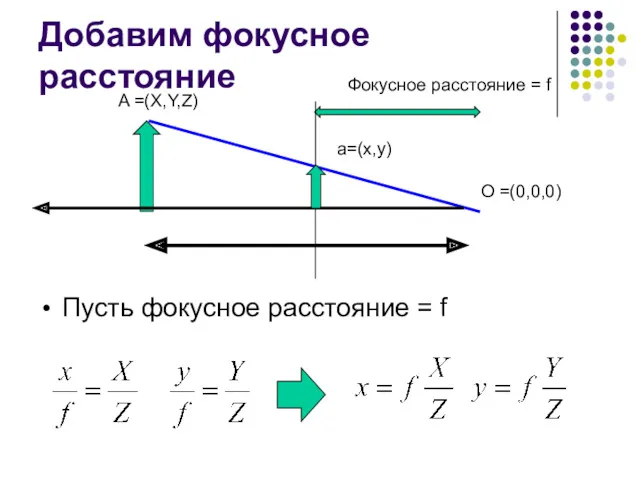
Добавим фокусное расстояние
Пусть фокусное расстояние = f
Добавим фокусное расстояние
Пусть фокусное расстояние = f
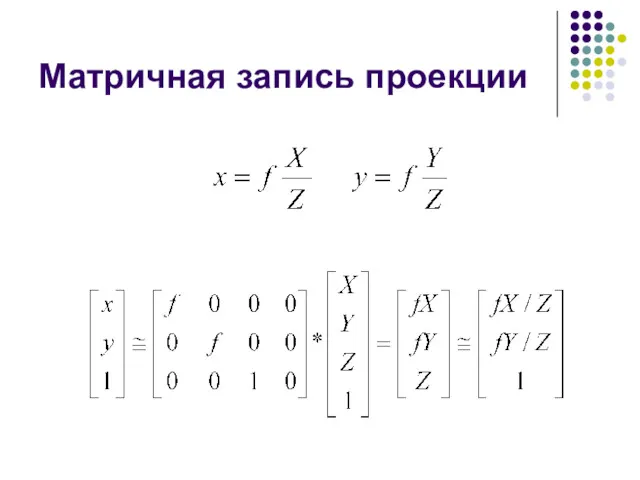
Матричная запись проекции
Матричная запись проекции
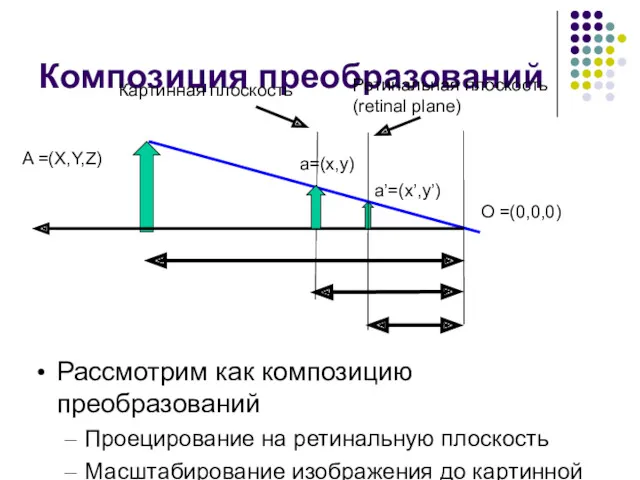
Композиция преобразований
A =(X,Y,Z)
O =(0,0,0)
Z
1
Рассмотрим как композицию преобразований
Проецирование на ретинальную плоскость
Масштабирование изображения
Композиция преобразований
A =(X,Y,Z)
O =(0,0,0)
Z
1
Рассмотрим как композицию преобразований
Проецирование на ретинальную плоскость
Масштабирование изображения
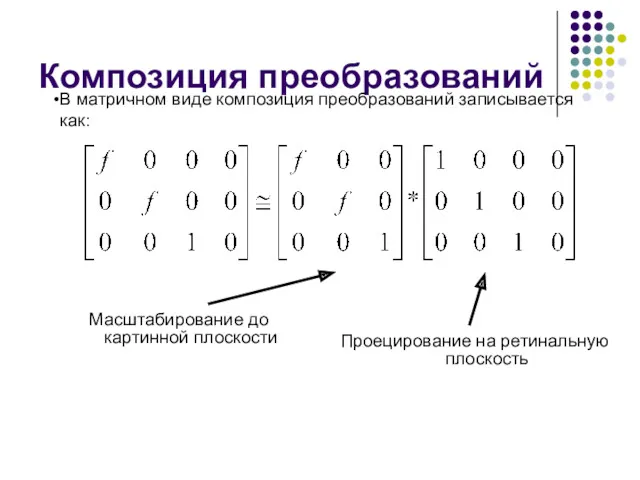
Композиция преобразований
В матричном виде композиция преобразований записывается как:
Композиция преобразований
В матричном виде композиция преобразований записывается как:
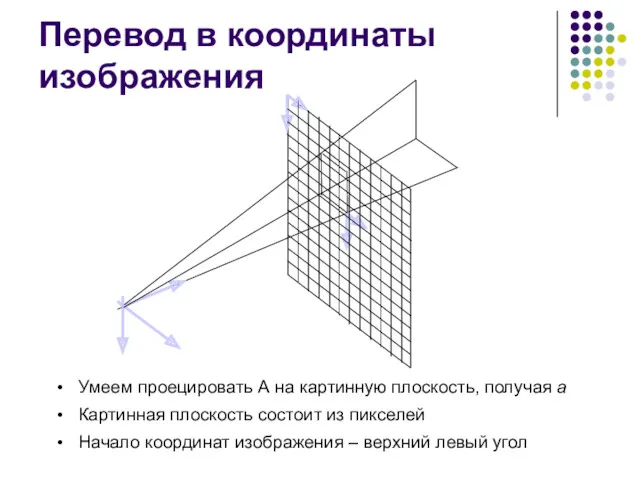
A
Перевод в координаты изображения
Умеем проецировать А на картинную плоскость, получая а
Картинная
A
Перевод в координаты изображения
Умеем проецировать А на картинную плоскость, получая а
Картинная
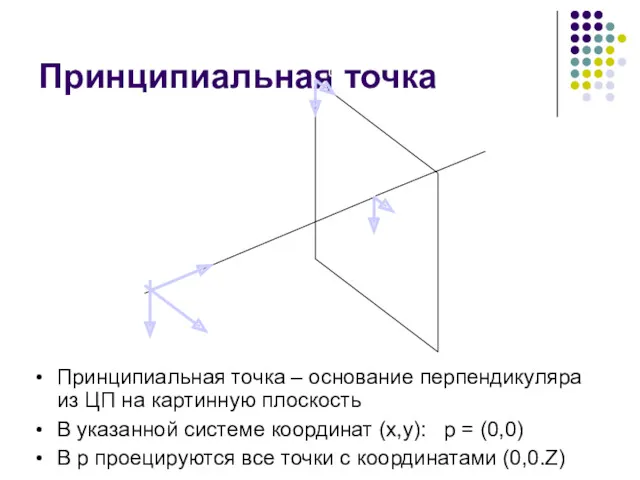
Принципиальная точка
Принципиальная точка – основание перпендикуляра из ЦП на картинную плоскость
В
Принципиальная точка
Принципиальная точка – основание перпендикуляра из ЦП на картинную плоскость
В
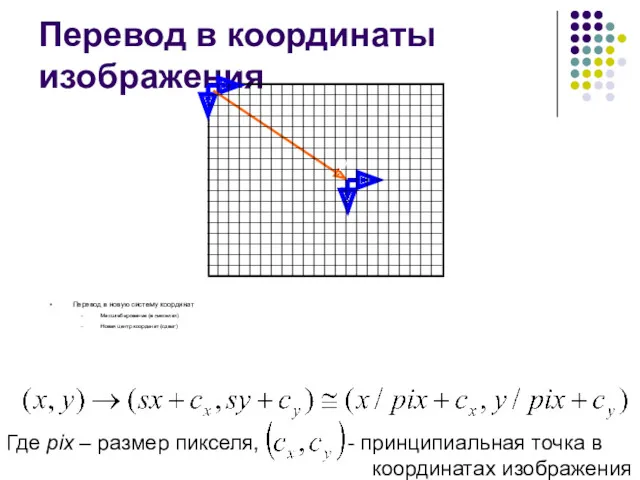
Перевод в координаты изображения
Перевод в новую систему координат
Масштабирование (в пикселах)
Новая центр
Перевод в координаты изображения
Перевод в новую систему координат
Масштабирование (в пикселах)
Новая центр
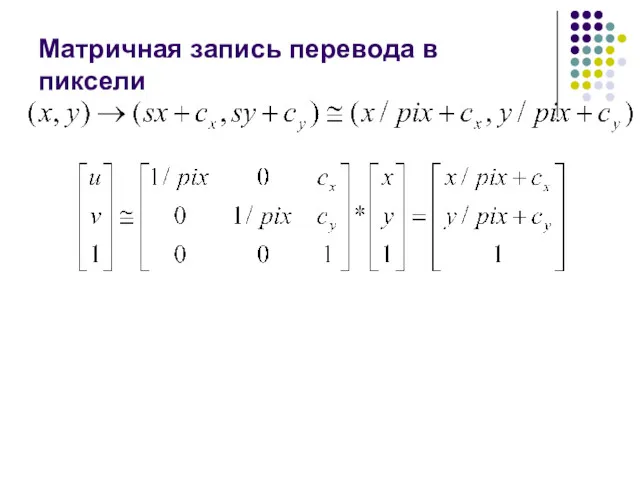
Матричная запись перевода в пиксели
Матричная запись перевода в пиксели
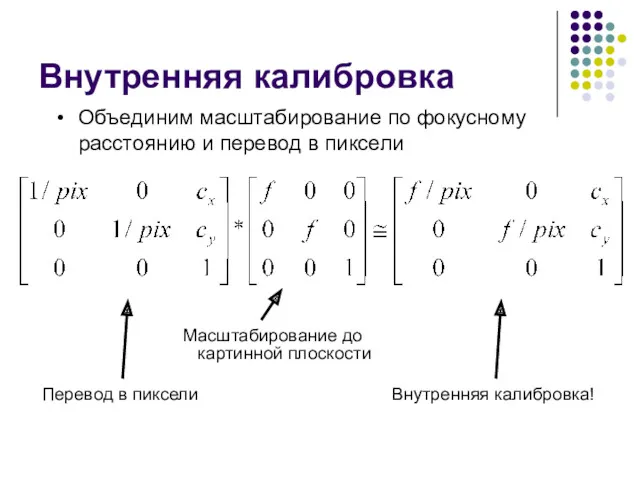
Внутренняя калибровка
Объединим масштабирование по фокусному расстоянию и перевод в пиксели
Масштабирование до
Внутренняя калибровка
Объединим масштабирование по фокусному расстоянию и перевод в пиксели
Масштабирование до
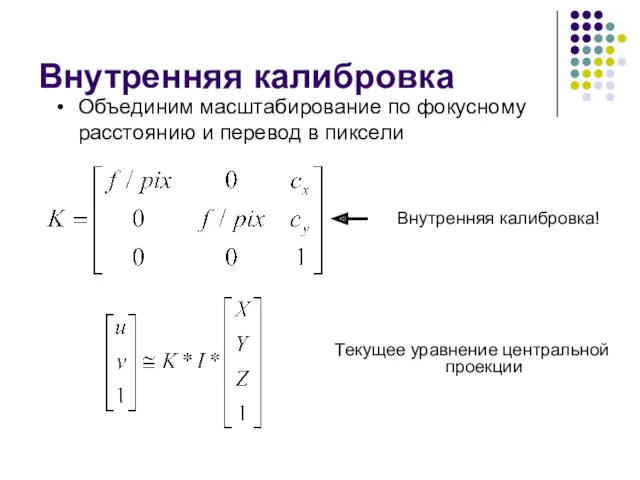
Внутренняя калибровка
Объединим масштабирование по фокусному расстоянию и перевод в пиксели
Текущее уравнение
Внутренняя калибровка
Объединим масштабирование по фокусному расстоянию и перевод в пиксели
Текущее уравнение

Матрица и картинная плоскость
Матрица камеры конечного размера!
Картинная плоскость бесконечна
При проецировании точки
Матрица и картинная плоскость
Матрица камеры конечного размера!
Картинная плоскость бесконечна
При проецировании точки
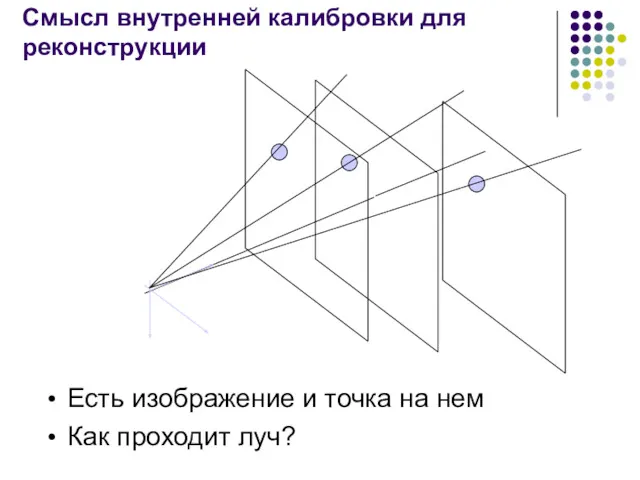
Смысл внутренней калибровки для реконструкции
Есть изображение и точка на нем
Как проходит
Смысл внутренней калибровки для реконструкции
Есть изображение и точка на нем
Как проходит
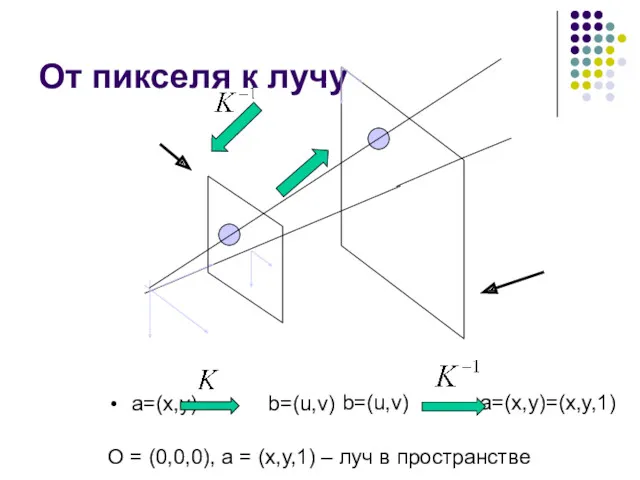
От пикселя к лучу
X
Y
Z
O
a=(x,y) b=(u,v)
O = (0,0,0), a = (x,y,1) –
От пикселя к лучу
X
Y
Z
O
a=(x,y) b=(u,v)
O = (0,0,0), a = (x,y,1) –
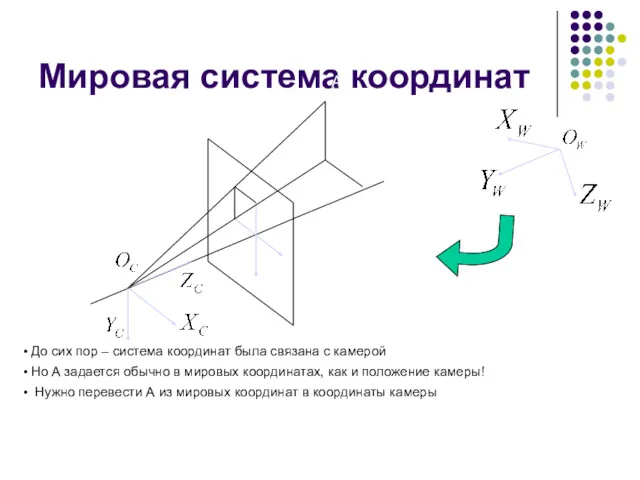
Мировая система координат
До сих пор – система координат была связана
Мировая система координат
До сих пор – система координат была связана
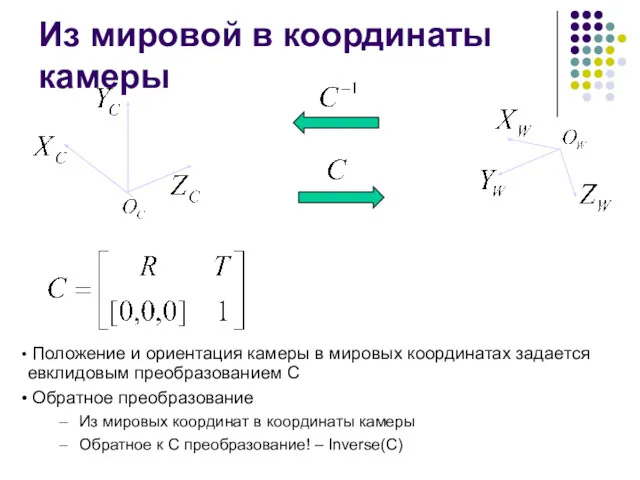
Из мировой в координаты камеры
Положение и ориентация камеры в мировых
Из мировой в координаты камеры
Положение и ориентация камеры в мировых
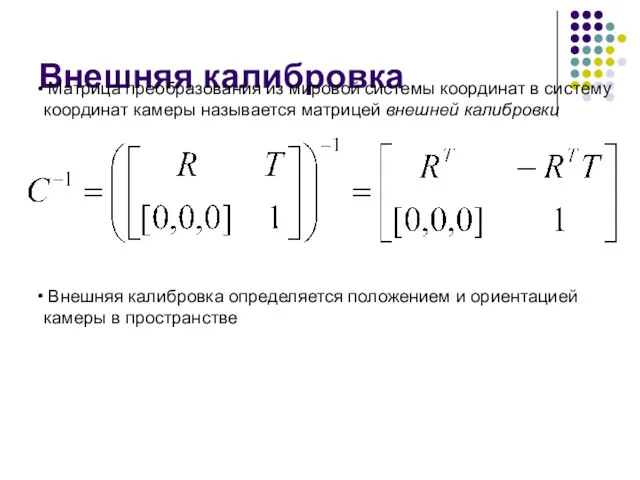
Внешняя калибровка
Матрица преобразования из мировой системы координат в систему координат
Внешняя калибровка
Матрица преобразования из мировой системы координат в систему координат
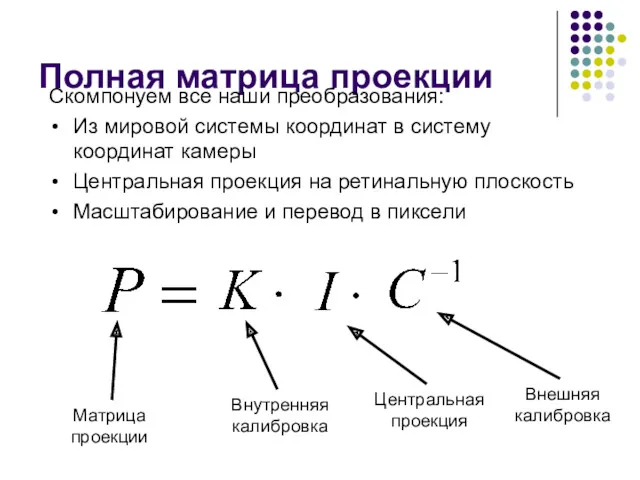
Полная матрица проекции
Скомпонуем все наши преобразования:
Из мировой системы координат в систему
Полная матрица проекции
Скомпонуем все наши преобразования:
Из мировой системы координат в систему
Реальная камера
Реальная камера
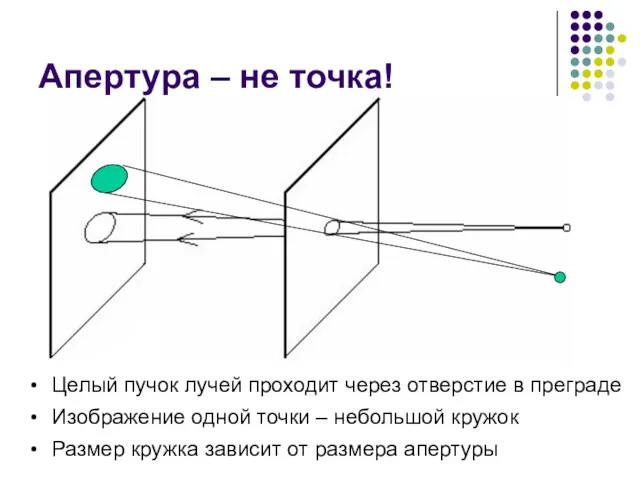
Апертура – не точка!
Целый пучок лучей проходит через отверстие в преграде
Изображение
Апертура – не точка!
Целый пучок лучей проходит через отверстие в преграде
Изображение
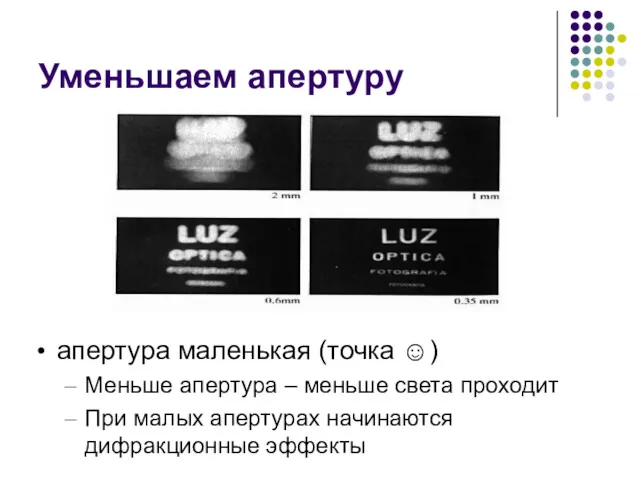
Уменьшаем апертуру
апертура маленькая (точка ☺)
Меньше апертура – меньше света проходит
При малых
Уменьшаем апертуру
апертура маленькая (точка ☺)
Меньше апертура – меньше света проходит
При малых
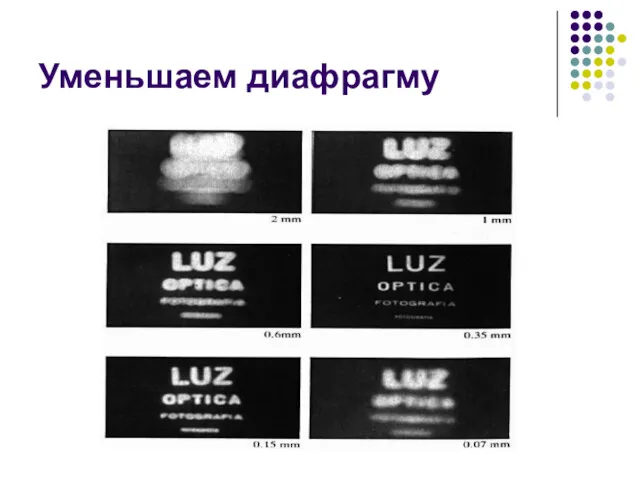
Уменьшаем диафрагму
Уменьшаем диафрагму
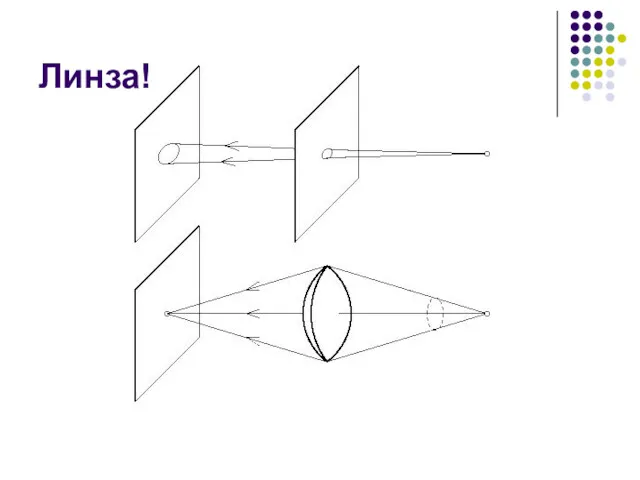
Линза!
Линза позволяет использовать большую диафрагму
и увеличить поток света от каждой
Линза!
Линза позволяет использовать большую диафрагму
и увеличить поток света от каждой
ЛИНЗА
ЛИНЗА
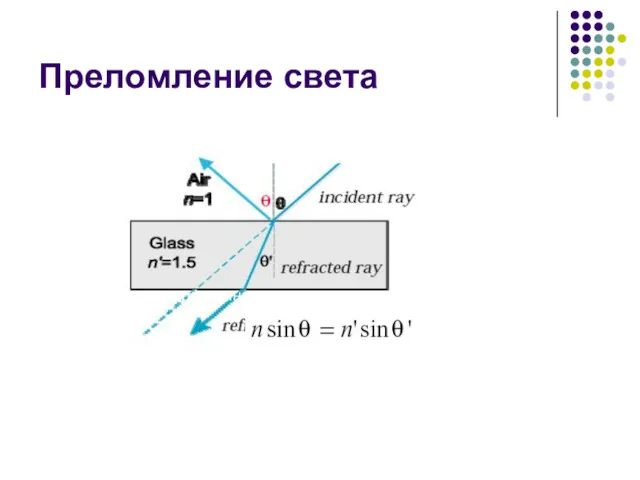
Преломление света
Луч света на стыке различных материалов преломляется
Где n –
Преломление света
Луч света на стыке различных материалов преломляется
Где n –
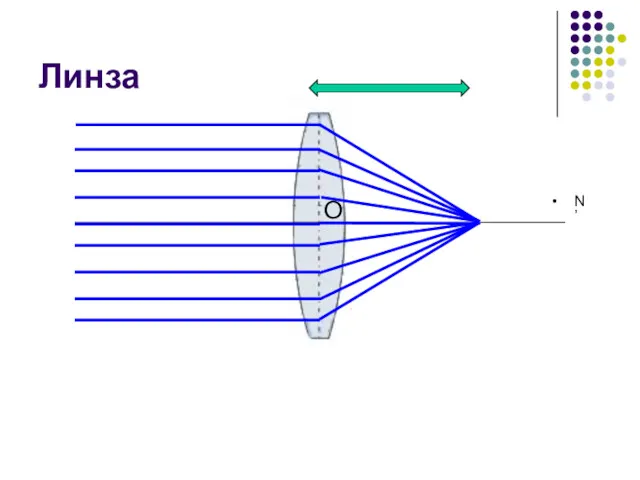
Линза
F’
N
N’
NN’ – главная оптическая ось, пересекающая центры сферических поверхностей
Пучок
Линза
F’
N
N’
NN’ – главная оптическая ось, пересекающая центры сферических поверхностей
Пучок
Линза
F’
О
F’
2F’
-F’
А
B
Линза
F’
О
F’
2F’
-F’
А
B
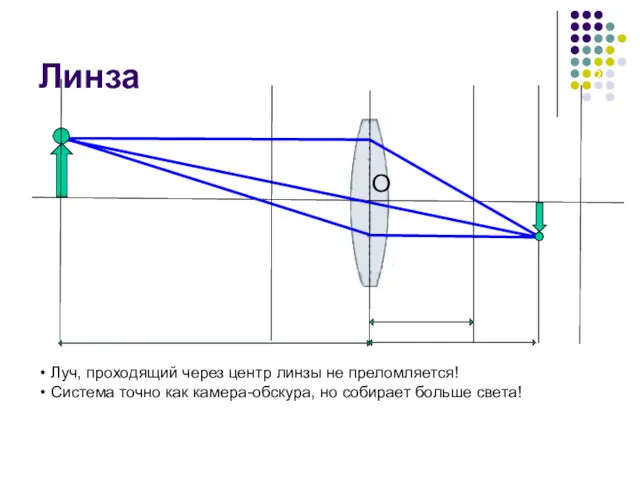
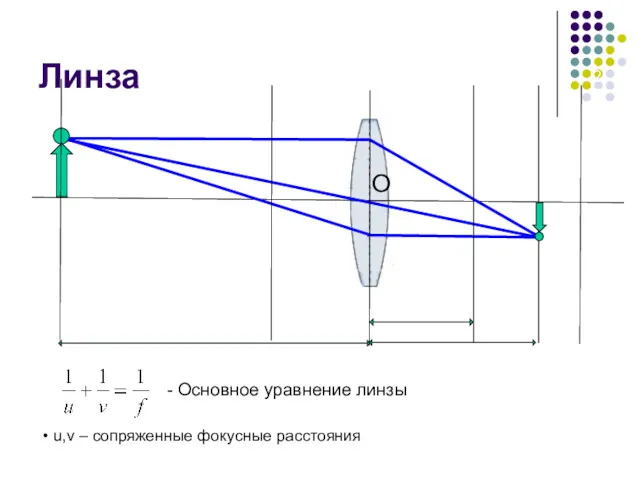
Линза
Луч, проходящий через центр линзы не преломляется!
Система точно
Линза
Луч, проходящий через центр линзы не преломляется!
Система точно
Фокусировка
Только часть объектов оказываются «в фокусе»
Фокусировка
Только часть объектов оказываются «в фокусе»
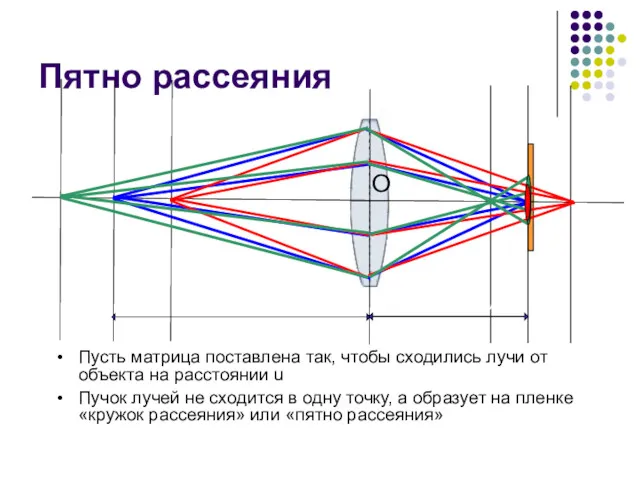
Пятно рассеяния
Пусть матрица поставлена так, чтобы сходились лучи от объекта на
Пятно рассеяния
Пусть матрица поставлена так, чтобы сходились лучи от объекта на
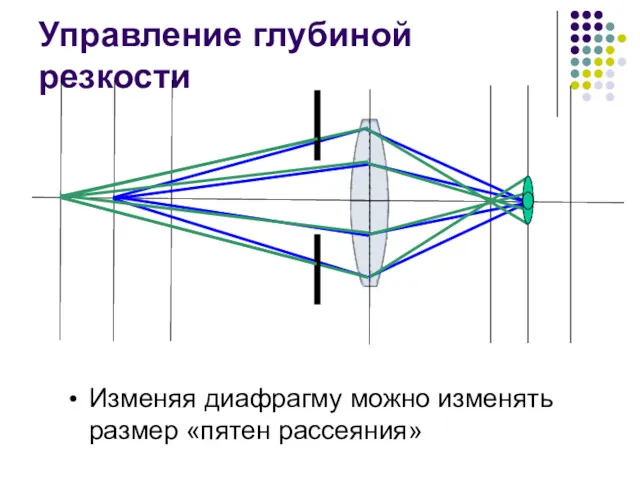
Управление глубиной резкости
Изменяя диафрагму можно изменять размер «пятен рассеяния»
Управление глубиной резкости
Изменяя диафрагму можно изменять размер «пятен рассеяния»
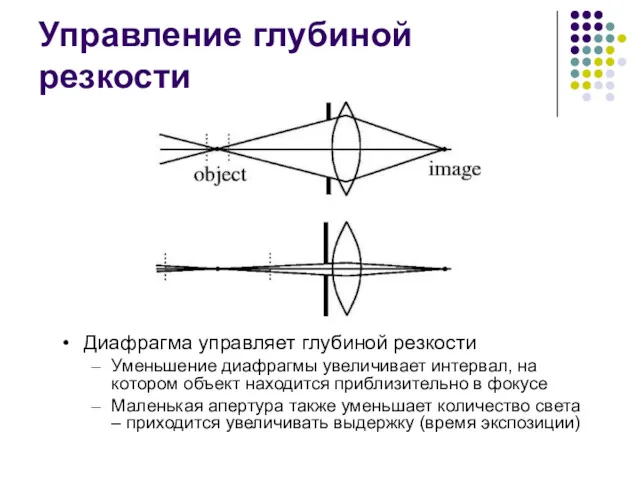
Управление глубиной резкости
Диафрагма управляет глубиной резкости
Уменьшение диафрагмы увеличивает интервал, на котором
Управление глубиной резкости
Диафрагма управляет глубиной резкости
Уменьшение диафрагмы увеличивает интервал, на котором

Изменение глубины резкости
f/2.8
Большая диафрагма = маленькая DOF
f/22
Маленькая диафрагма = большая
Изменение глубины резкости
f/2.8
Большая диафрагма = маленькая DOF
f/22
Маленькая диафрагма = большая
Угол обзора (поле зрения)
A
Размер пленки и фокусное расстояние определяют угол
Угол обзора (поле зрения)
A
Размер пленки и фокусное расстояние определяют угол
f
Зависимость поля зрения от фокусного расстояния
Больше фокусное расстояние – меньше
f
Зависимость поля зрения от фокусного расстояния
Больше фокусное расстояние – меньше

Поле зрения и трансфокация (Zoom)
Поле зрения и трансфокация (Zoom)
НЕДОСТАТКИ ЛИНЗ
НЕДОСТАТКИ ЛИНЗ
Хроматическая аберрация
Угол преломления света зависит от длины волны
Лучи разного цвета преломляются
Хроматическая аберрация
Угол преломления света зависит от длины волны
Лучи разного цвета преломляются
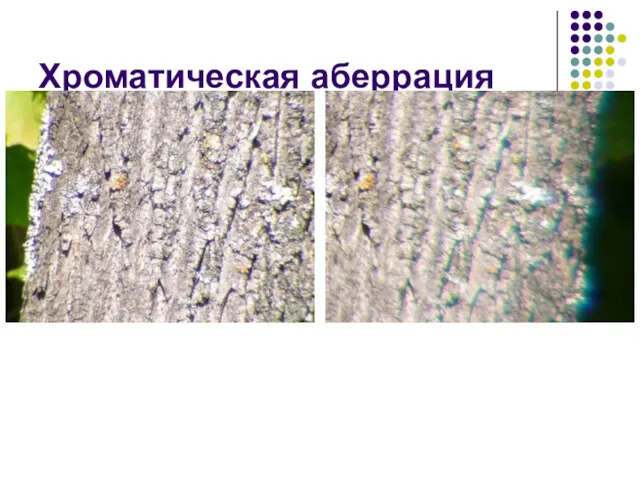
Хроматическая аберрация
Центр изображения
Край изображения
Хроматическая аберрация
Центр изображения
Край изображения

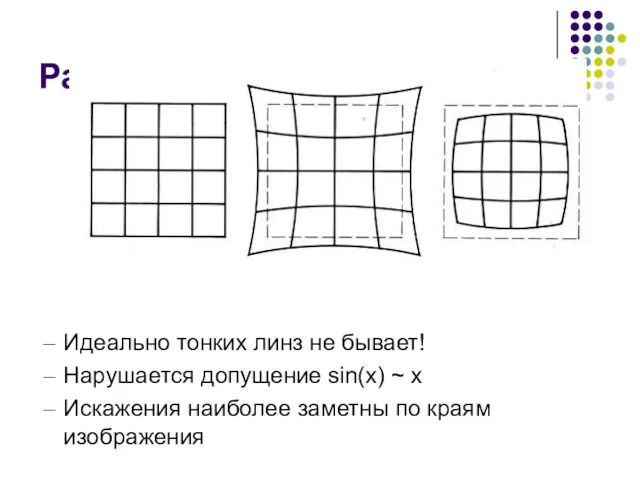
Радиальная дисторсия
Прямые линии по краям изображения превращаются в кривые
Радиальная дисторсия
Прямые линии по краям изображения превращаются в кривые
Радиальная дисторсия
Идеально тонких линз не бывает!
Нарушается допущение sin(x) ~ x
Искажения наиболее
Радиальная дисторсия
Идеально тонких линз не бывает!
Нарушается допущение sin(x) ~ x
Искажения наиболее
Изображение =Сигнал
Интенсивность от координаты I(x,y)
ФРТ – функция рассеивания точки
ОПФ – оптическая
Изображение =Сигнал
Интенсивность от координаты I(x,y)
ФРТ – функция рассеивания точки
ОПФ – оптическая
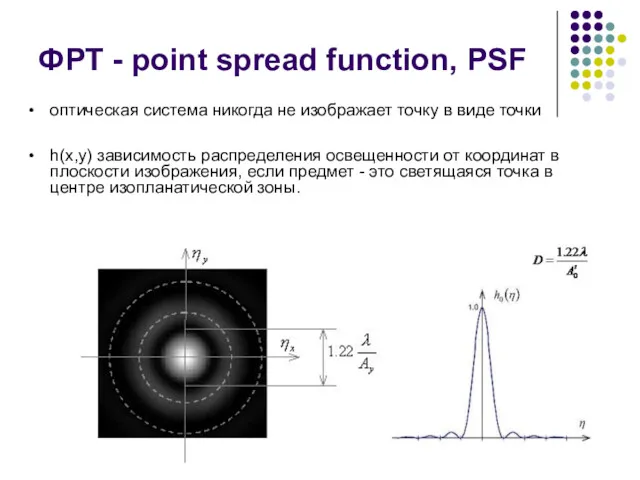
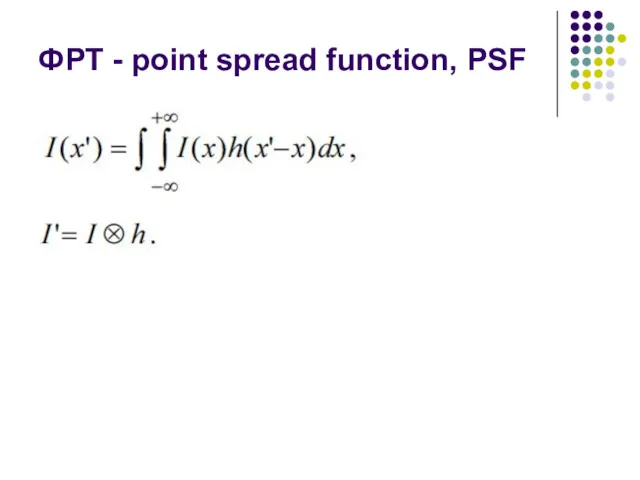
ФРТ - point spread function, PSF
оптическая система никогда не изображает точку
ФРТ - point spread function, PSF
оптическая система никогда не изображает точку
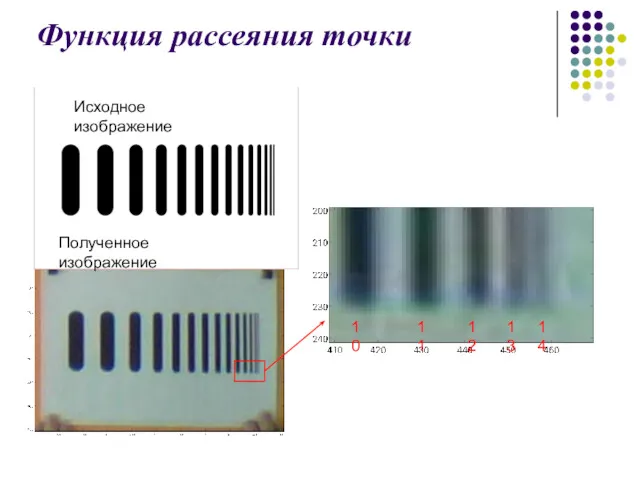
Функция рассеяния точки
Исходное изображение
Полученное изображение
10
11
12
14
13
Функция рассеяния точки
Исходное изображение
Полученное изображение
10
11
12
14
13
ФРТ - point spread function, PSF
ФРТ - point spread function, PSF
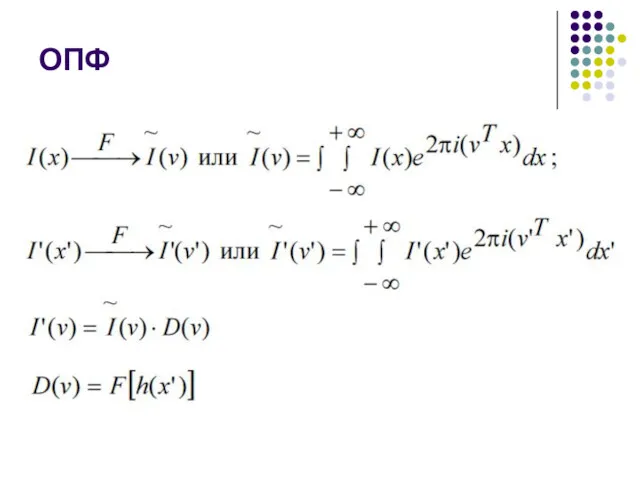
ОПФ
ОПФ
Построение признаков для изображений
Признаки формы
Признаки порядка
Признаки структуры
Построение признаков для изображений
Признаки формы
Признаки порядка
Признаки структуры
 Актуальные проблемы компьютерной безопасности и защиты информации
Актуальные проблемы компьютерной безопасности и защиты информации Путешествие в Информашково
Путешествие в Информашково Схемы распределения памяти. (Тема 13)
Схемы распределения памяти. (Тема 13) Программирование на языке Python
Программирование на языке Python Программы схемотехнического моделирования
Программы схемотехнического моделирования Презентация Латинский алфавит, 2 класс
Презентация Латинский алфавит, 2 класс Финансовая отчетность для владельца бизнеса. 1С:Управление небольшой фирмой 8
Финансовая отчетность для владельца бизнеса. 1С:Управление небольшой фирмой 8 Этапы подготовки задачи к компьютерной обработке 2-3 уроки: Составление программ на алгоритмическом языке, отладка программы, тестирование, анализ результатов
Этапы подготовки задачи к компьютерной обработке 2-3 уроки: Составление программ на алгоритмическом языке, отладка программы, тестирование, анализ результатов Инструкция по удаленному подключению[
Инструкция по удаленному подключению[ Язык программирования Python
Язык программирования Python Основы управления знаниями. Типологические основы управления знаниями и персоналом
Основы управления знаниями. Типологические основы управления знаниями и персоналом Файлы и файловые структуры
Файлы и файловые структуры Locators XPATH, CSS, DOM
Locators XPATH, CSS, DOM Обработка целых чисел. Проверка делимости. Программа Python. Программа Pascal
Обработка целых чисел. Проверка делимости. Программа Python. Программа Pascal KLM Royal Dutch Airlines. Отчет по странице бренда в ВКОНТАКТЕ
KLM Royal Dutch Airlines. Отчет по странице бренда в ВКОНТАКТЕ Информация и ее виды
Информация и ее виды LINUX. Файловая система. Настройки. Команды
LINUX. Файловая система. Настройки. Команды Test Driven Development или как не выстрелить себе в ногу (.NET)
Test Driven Development или как не выстрелить себе в ногу (.NET) Об'єктно-орієнтоване програмування
Об'єктно-орієнтоване програмування Использование ИКТ на уроках математики
Использование ИКТ на уроках математики Внедрение цифровых технологий в образовательный процесс
Внедрение цифровых технологий в образовательный процесс Новая научная литература в читальном зале
Новая научная литература в читальном зале Связывание таблиц базы данных
Связывание таблиц базы данных MySql. Система управления реляционными базами данных
MySql. Система управления реляционными базами данных Проектирование БД. Этап концептуального проектирования
Проектирование БД. Этап концептуального проектирования Работа с файлами
Работа с файлами Структурне тестування програмного забезпечення. Формальні специфікації й верифікація програм. (Лекція 1.3)
Структурне тестування програмного забезпечення. Формальні специфікації й верифікація програм. (Лекція 1.3) Виды алгоритмов
Виды алгоритмов