- Молекулярна динаміка з врахуванням обертових ступенів вільності

Содержание
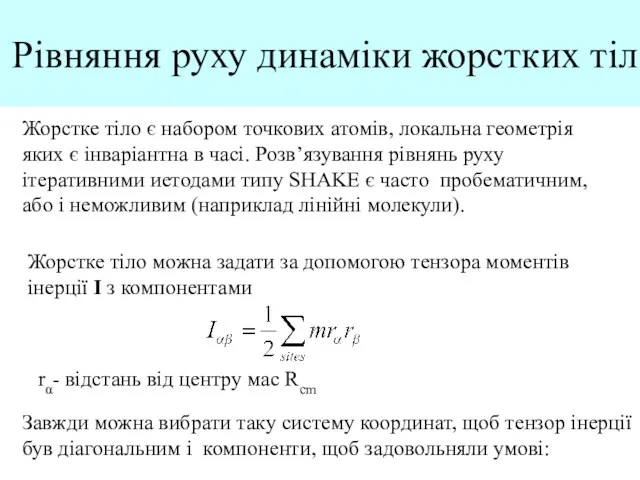
- 2. Рівняння руху динаміки жорстких тіл Жорстке тіло є набором точкових атомів, локальна геометрія яких є інваріантна
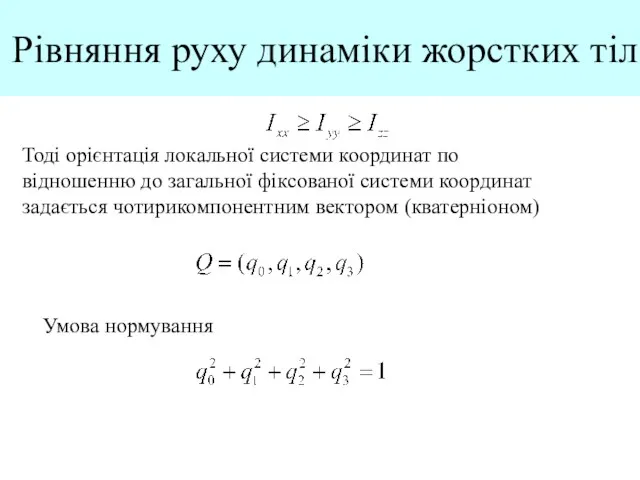
- 3. Рівняння руху динаміки жорстких тіл Тоді орієнтація локальної системи координат по відношенню до загальної фіксованої системи
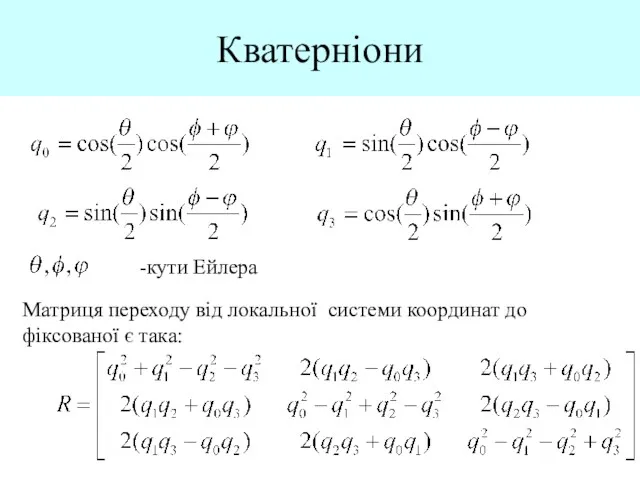
- 4. Кватерніони Матриця переходу від локальної системи координат до фіксованої є така: -кути Ейлера
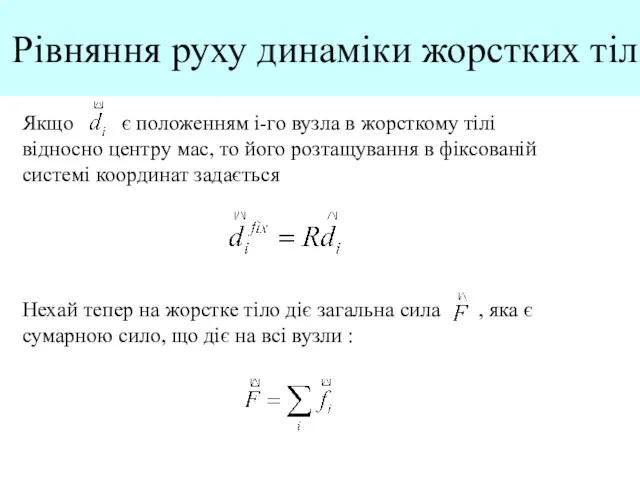
- 5. Рівняння руху динаміки жорстких тіл Якщо є положенням і-го вузла в жорсткому тілі відносно центру мас,
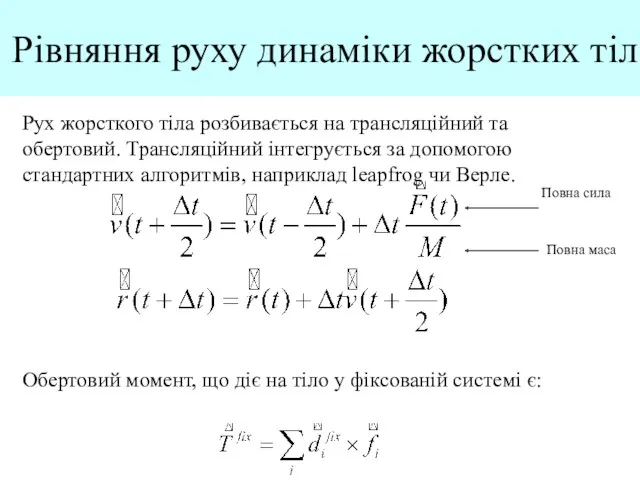
- 6. Рівняння руху динаміки жорстких тіл Рух жорсткого тіла розбивається на трансляційний та обертовий. Трансляційний інтегрується за
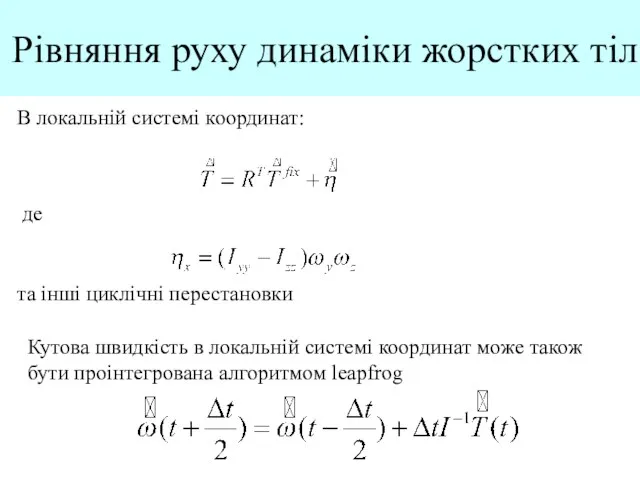
- 7. Рівняння руху динаміки жорстких тіл В локальній системі координат: де та інші циклічні перестановки Кутова швидкість
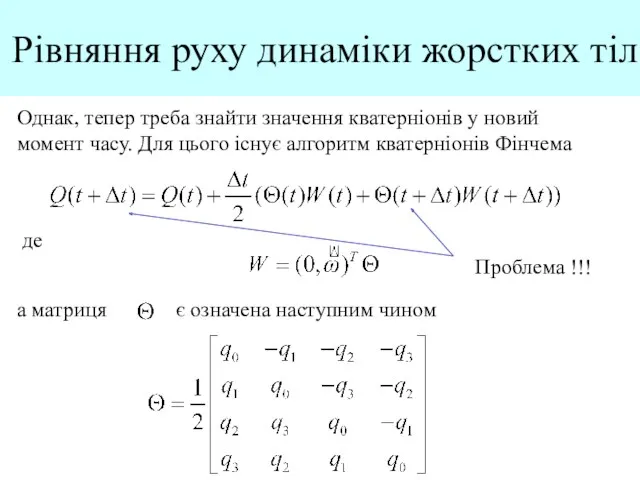
- 8. Рівняння руху динаміки жорстких тіл Однак, тепер треба знайти значення кватерніонів у новий момент часу. Для
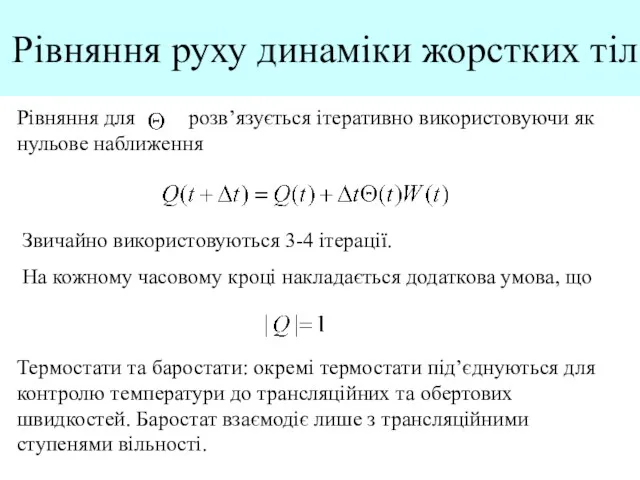
- 9. Рівняння руху динаміки жорстких тіл Рівняння для розв’язується ітеративно використовуючи як нульове наближення Звичайно використовуються 3-4
- 11. Скачать презентацию
Рівняння руху динаміки жорстких тіл
Жорстке тіло є набором точкових атомів,
Рівняння руху динаміки жорстких тіл
Жорстке тіло є набором точкових атомів,
Рівняння руху динаміки жорстких тіл
Тоді орієнтація локальної системи координат по
Рівняння руху динаміки жорстких тіл
Тоді орієнтація локальної системи координат по
Кватерніони
Матриця переходу від локальної системи координат до фіксованої є така:
-кути Ейлера
Кватерніони
Матриця переходу від локальної системи координат до фіксованої є така:
-кути Ейлера
Рівняння руху динаміки жорстких тіл
Якщо є положенням і-го вузла в
Рівняння руху динаміки жорстких тіл
Якщо є положенням і-го вузла в
Рівняння руху динаміки жорстких тіл
Рух жорсткого тіла розбивається на трансляційний
Рівняння руху динаміки жорстких тіл
Рух жорсткого тіла розбивається на трансляційний
Рівняння руху динаміки жорстких тіл
В локальній системі координат:
де
та інші циклічні
Рівняння руху динаміки жорстких тіл
В локальній системі координат:
де
та інші циклічні
Рівняння руху динаміки жорстких тіл
Однак, тепер треба знайти значення кватерніонів
Рівняння руху динаміки жорстких тіл
Однак, тепер треба знайти значення кватерніонів
Рівняння руху динаміки жорстких тіл
Рівняння для розв’язується ітеративно використовуючи як
Рівняння руху динаміки жорстких тіл
Рівняння для розв’язується ітеративно використовуючи як
 Кібернетична безпека
Кібернетична безпека АНО Центр информационной безопасности в сети интернет Защита
АНО Центр информационной безопасности в сети интернет Защита Имитационное моделирование электромеханических систем
Имитационное моделирование электромеханических систем Обзор поисковых систем
Обзор поисковых систем В рамках практики seo-специалистом
В рамках практики seo-специалистом Графические операторы языка Бейсик
Графические операторы языка Бейсик Соглашения, принятые для языка Си
Соглашения, принятые для языка Си Морское приключение
Морское приключение Как создать свой YouTube канал
Как создать свой YouTube канал Условные операторы
Условные операторы Кодирование информации
Кодирование информации Interconnect delay. (Chapter 7)
Interconnect delay. (Chapter 7) Эко-dream
Эко-dream Playtika assignment
Playtika assignment Кібербулінг. Основні загрози
Кібербулінг. Основні загрози Бизнес в глобальной инфокоммуникационной среде
Бизнес в глобальной инфокоммуникационной среде Моделирование. Виды информационных моделей. Графические информационные модели
Моделирование. Виды информационных моделей. Графические информационные модели Представление чисел в компьютере
Представление чисел в компьютере 9-2-1 (2)
9-2-1 (2) Искусственный интеллект и ЭВМ
Искусственный интеллект и ЭВМ Организация курсов компьютерной грамотности НКО на базе центров социального обслуживания
Организация курсов компьютерной грамотности НКО на базе центров социального обслуживания 001 Ancient Greek History - Essential Chronology
001 Ancient Greek History - Essential Chronology Архивирование файлов
Архивирование файлов Понятие M-файла
Понятие M-файла Информационные технологии в управлении
Информационные технологии в управлении Библиографическое описание документа по ГОСТу
Библиографическое описание документа по ГОСТу Стоматологический сайт в интернете, для профессионального развития врачей стоматологов
Стоматологический сайт в интернете, для профессионального развития врачей стоматологов Об'єктно-орієнтоване програмування. Принцип інкапсуляції. (Лекція 1)
Об'єктно-орієнтоване програмування. Принцип інкапсуляції. (Лекція 1)