Програмування мікроконтролерів. Лекція 1. Базові поняття програмування мікроконтролерів. Бібліотеки CMSIS і SPL презентация
- Програмування мікроконтролерів. Лекція 1. Базові поняття програмування мікроконтролерів. Бібліотеки CMSIS і SPL

Содержание
- 2. Лекція 1 Організація курсу ВНС: пароль - Ghiraldi Лабораторних — 8 , у сумі — 40
- 3. Лекція 1 Dinamica Generale S.p.A (1)
- 4. Лекція 1 Dinamica Generale S.p.A (2)
- 5. Лекція 1 Dinamica Generale S.p.A (3) https://youtu.be/3VZ0OxEiQD0
- 6. Лекція 1 Dinamica Generale S.p.A (4)
- 7. Лекція 1 Dinamica Generale S.p.A (3)
- 8. Лекція 1 Segger Emwin
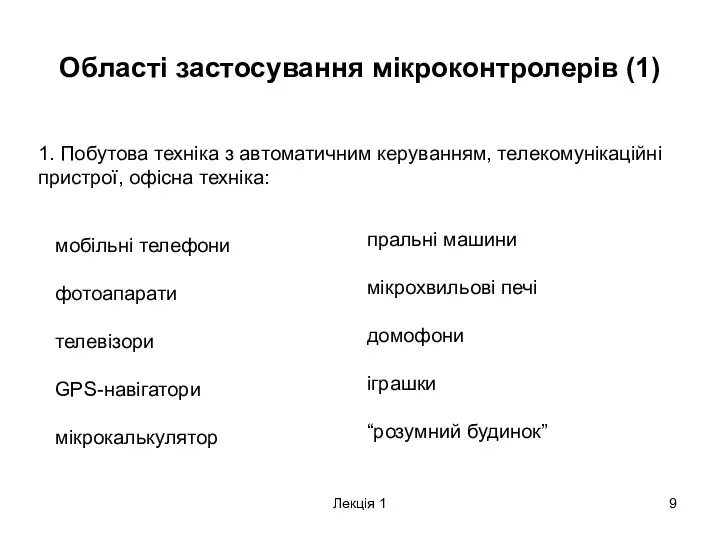
- 9. Лекція 1 Області застосування мікроконтролерів (1) 1. Побутова техніка з автоматичним керуванням, телекомунікаційні пристрої, офісна техніка:
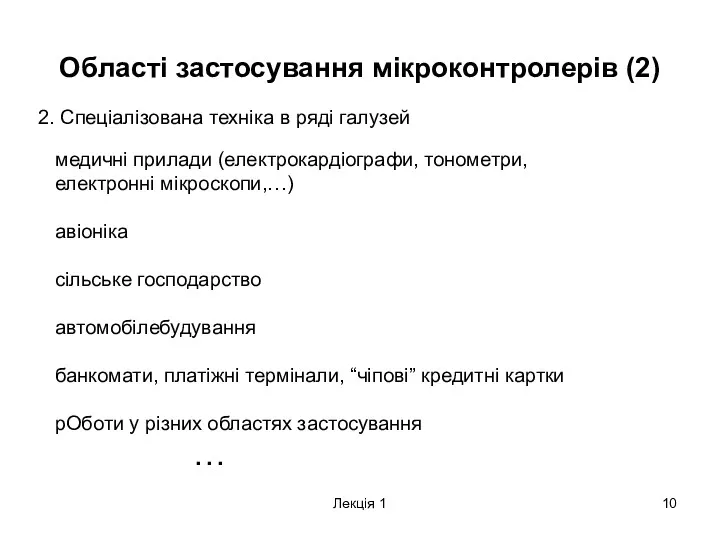
- 10. Лекція 1 Області застосування мікроконтролерів (2) 2. Спеціалізована техніка в ряді галузей медичні прилади (електрокардіографи, тонометри,
- 11. Лекція 1 Характеристики вбудованих систем Конкретне призначення, на противагу до універсальності Апаратні обмеження: обмежені обчислювальні можливості,
- 12. Лекція 1 Мікроконтролери та мікропроцесори Мікропроцесор – Процесор “в мініатюрі”, основна діяльність – читання/запис даних з/у
- 13. Лекція 1 Мікропрограмне забезпечення Мікропрограма – (“прошивка”, мікропрограмне забезпечення, firmware) Вміст пам’яті програм мікроконтролера, його програмне
- 14. Лекція 1 Мікроконтролер Класична аналогія: мікроконтролер – “мозок” пристрою, firmware – його “свідомість”. В залежності від
- 15. Лекція 1 ПЗП МК Є масив комірок пам’яті. Кожна комірка має свою адресу. У цих комірках
- 16. Лекція 1 Будова мікроконтролера Типовий контролер містить такий мінімум елементів: CPU (Арифметико-логічний пристрій (АЛП, ALU), акумулятор,
- 17. Лекція 1 АЛП АЛП виконує послідовність команд почергово. Команди зчитуються з ПЗП. Кожна зчитана команда розміщується
- 18. Лекція 1 Цикл виконання команд
- 19. Лекція 1 Лічильник команд Для того, щоб “витягти” наступну команду в послідовності, застосовується лічильник команд. Лічильник
- 20. Лекція 1 Розрядність АЛП Розрядність АЛП – визначає, якими числами оперує АЛП. Розрядність 16 означає, що
- 21. Лекція 1 Регістри Регістри – Комірки оперативної пам’яті, до яких МК звертається більш короткими і швидкими
- 22. Лекція 1 Порти вводу/виводу Порт вводу/виводу МК – іменована сукупність N виводів (синоніми виводу — пін,
- 23. Лекція 1 Таймери/лічильники Таймер – пристрій для формування часових інтервалів; цифровий лічильник, який рахує імпульси від
- 24. Лекція 1 Додаткові функціональні блоки МК Аналоговий компаратор – пристрій для контролю напруги. Порівнює виміряну напругу
- 25. Лекція 1 Шини мікроконтролера (1) Функціональні блоки мікроконтролера обмінюються даними через шини. Зокрема, дані з пам’яті
- 26. Лекція 1 Шини мікроконтролера (2) Функціональні блоки МК обмінюються даними через шини. Зокрема, дані з пам’яті
- 27. Лекція 1 Архітектури мікроконтролера (1) Є сотні мікроконтролерів, але всі їх можна поділити на групи. Мікроконтролери
- 28. Лекція 1 Архітектури мікроконтролера (2)
- 29. Лекція 1 Організація пам’яті (1) 2 архітектури: 1. прінстонська архітектура (архітектура фон Неймана) застосовує одну спільну
- 30. Лекція 1 Організація пам’яті (2) Переваги гарвардської архітектури: 1. швидкий пошук операндів (даних). Оскільки дані є
- 31. Лекція 1 Система команд МК (1) RISC & CISC: 1. CISC-архітектура (Complicated Instruction Set Computer) —
- 32. Лекція 1 Система команд МК (2) RISC: 1. однаковий час виконання команд (вибірка і виконання за
- 33. 03.09.15 10:44 Лекція 1 Кроки створення мікропрограми 1. Написання програми однією з мов 2. Компіляція (може
- 34. Лекція 1 Програматори
- 35. Лекція 1 Тактова частота мікроконтролера Робота блоків залежить від того, чи вони отримують тактові сигнали. Нема
- 36. Архітектура ARM Продукт Acorn Computers, перший випуск — у 1982 р. Інтерпретація: Acorn RISC Machine, Advanced
- 37. Лекція 1 CMSIS CMSIS – Бібліотека, стандартна для всіх МК з ядром ARM Cortex. Стандартизується ARM
- 38. Лекція 1 Структура CMSIS (концепція)
- 39. Лекція 1 Функціональні рівні CMSIS 3 Рівні: 1. Core Peripheral Access Layer (CPAL) – адреси і
- 40. Лекція 1 Файли у складі CMSIS 2 частини: 1. спільна для всіх МК з однаковим ядром
- 41. Лекція 1 Файли у складі CMSIS (2) system_ .h + system_ .с конфігурація System Clock +
- 42. Лекція 1 Startup Містить: первинну ініціалізацію МК налаштування стека занулення секції BSS виклик функції main
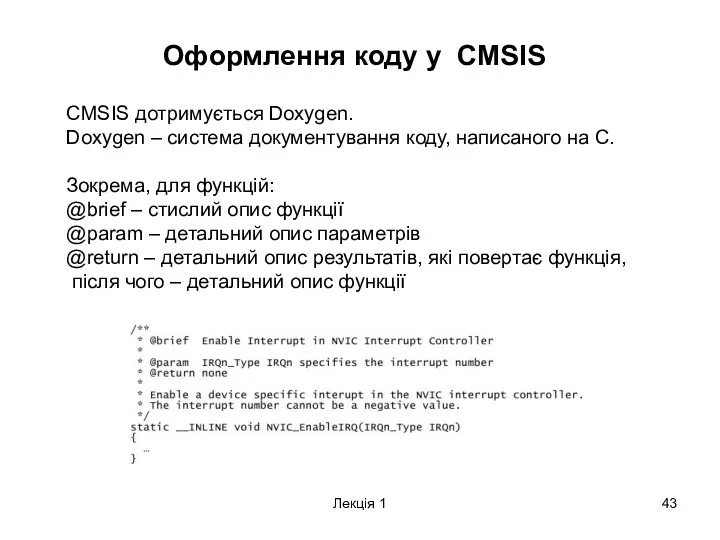
- 43. Лекція 1 Оформлення коду у CMSIS CMSIS дотримується Doxygen. Doxygen – система документування коду, написаного на
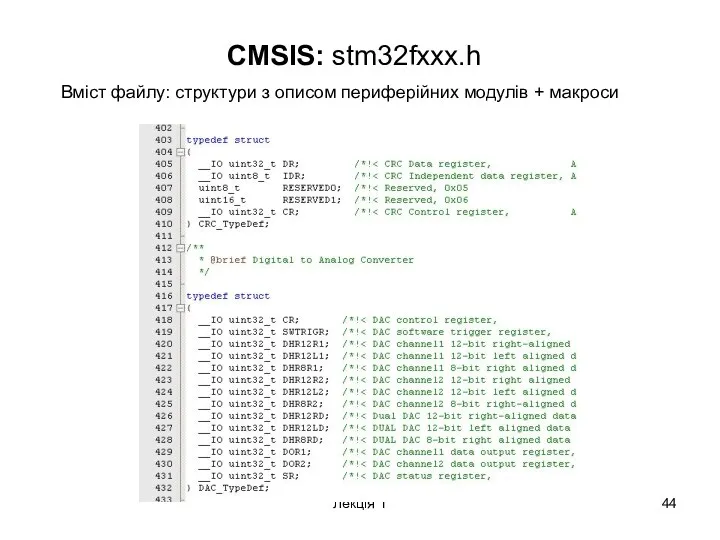
- 44. Лекція 1 CMSIS: stm32fxxx.h Вміст файлу: структури з описом периферійних модулів + макроси
- 45. Лекція 1 Standard Peripherals Library (SPL) SPL – Бібліотека, створена STMicroelectronics для полегшення доступу до периферії
- 46. Лекція 1 Архітектура SPL
- 47. Лекція 1 Структура бібліотеки SPL Бібліотека SPL постачається у zip-архіві підкаталоги: CMSIS STM32Fxxx_StdPeriph_Driver
- 48. Лекція 1 SPL: STM32Fxxx_StdPeriph_Driver підкаталоги: inc – заголовні файли драйверів src – с-файли драйверів Для будь-якого
- 49. Лекція 1 Конфігурація/ініціалізація периферії (1) Вся периферія описана структурами. Потрібні кроки: 1. Підключити потрібний .h-файл 2.
- 50. Лекція 1 Конфігурація/ініціалізація периферії (2) Щоб знати, яку з 3 функцій для тактування слід викликати, потрібно
- 51. Лекція 1 Конфігурація/ініціалізація периферії (3) 4. Задати значення полям екземпляра структури 5. Викликати функцію PPP_Init(PPP, &PPP_InitStructure);
- 52. Лекція 1 Приклад конфігурації GPIO (1) 1. Функції і дані для роботи з портами вводу/виводу загального
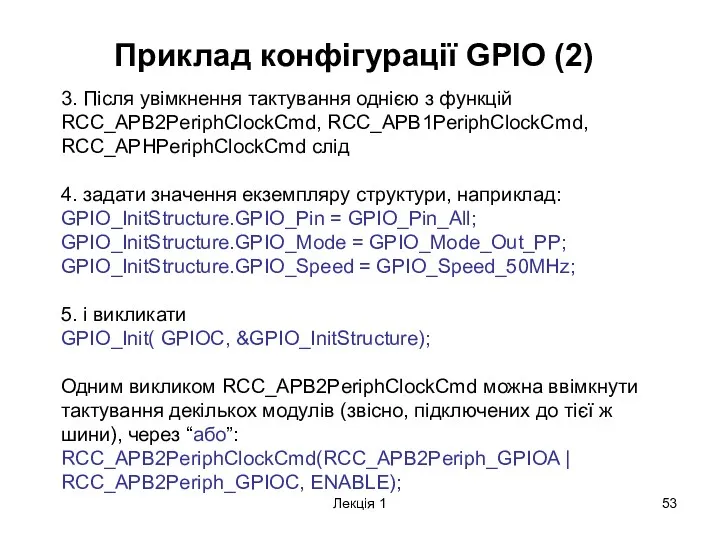
- 53. Лекція 1 Приклад конфігурації GPIO (2) 3. Після увімкнення тактування однією з функцій RCC_APB2PeriphClockCmd, RCC_APB1PeriphClockCmd, RCC_APHPeriphClockCmd
- 55. Скачать презентацию
Лекція 1
Організація курсу
ВНС: пароль - Ghiraldi
Лабораторних — 8 , у
Лекція 1
Організація курсу
ВНС: пароль - Ghiraldi
Лабораторних — 8 , у
Лекція 1
Dinamica Generale S.p.A (1)
Лекція 1
Dinamica Generale S.p.A (1)

Лекція 1
Dinamica Generale S.p.A (2)
Лекція 1
Dinamica Generale S.p.A (2)
Лекція 1
Dinamica Generale S.p.A (3)
https://youtu.be/3VZ0OxEiQD0
Лекція 1
Dinamica Generale S.p.A (3)
https://youtu.be/3VZ0OxEiQD0
Лекція 1
Dinamica Generale S.p.A (4)
Лекція 1
Dinamica Generale S.p.A (4)
Лекція 1
Dinamica Generale S.p.A (3)
Лекція 1
Dinamica Generale S.p.A (3)
Лекція 1
Segger Emwin
Лекція 1
Segger Emwin
Лекція 1
Області застосування мікроконтролерів (1)
1. Побутова техніка з автоматичним керуванням, телекомунікаційні
Лекція 1
Області застосування мікроконтролерів (1)
1. Побутова техніка з автоматичним керуванням, телекомунікаційні
Лекція 1
Області застосування мікроконтролерів (2)
2. Спеціалізована техніка в ряді галузей
медичні
Лекція 1
Області застосування мікроконтролерів (2)
2. Спеціалізована техніка в ряді галузей
медичні
Лекція 1
Характеристики вбудованих систем
Конкретне призначення, на противагу до універсальності
Апаратні обмеження: обмежені
Лекція 1
Характеристики вбудованих систем
Конкретне призначення, на противагу до універсальності Апаратні обмеження: обмежені
Лекція 1
Мікроконтролери та мікропроцесори
Мікропроцесор –
Процесор “в мініатюрі”, основна діяльність – читання/запис
Лекція 1
Мікроконтролери та мікропроцесори
Мікропроцесор –
Процесор “в мініатюрі”, основна діяльність – читання/запис
Лекція 1
Мікропрограмне забезпечення
Мікропрограма –
(“прошивка”, мікропрограмне забезпечення,
firmware)
Вміст пам’яті програм мікроконтролера,
його програмне забезпечення.
Лекція 1
Мікропрограмне забезпечення
Мікропрограма –
(“прошивка”, мікропрограмне забезпечення,
firmware)
Вміст пам’яті програм мікроконтролера, його програмне забезпечення.

Лекція 1
Мікроконтролер
Класична аналогія: мікроконтролер – “мозок” пристрою, firmware – його “свідомість”.
Лекція 1
Мікроконтролер
Класична аналогія: мікроконтролер – “мозок” пристрою, firmware – його “свідомість”.
Лекція 1
ПЗП МК
Є масив комірок пам’яті. Кожна комірка має свою адресу.
Лекція 1
ПЗП МК
Є масив комірок пам’яті. Кожна комірка має свою адресу.
Лекція 1
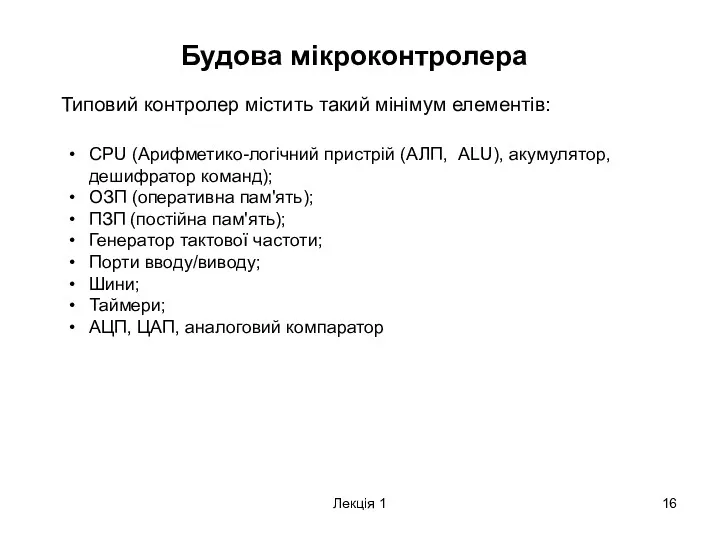
Будова мікроконтролера
Типовий контролер містить такий мінімум елементів:
CPU (Арифметико-логічний пристрій (АЛП,
Лекція 1
Будова мікроконтролера
Типовий контролер містить такий мінімум елементів:
CPU (Арифметико-логічний пристрій (АЛП,
Лекція 1
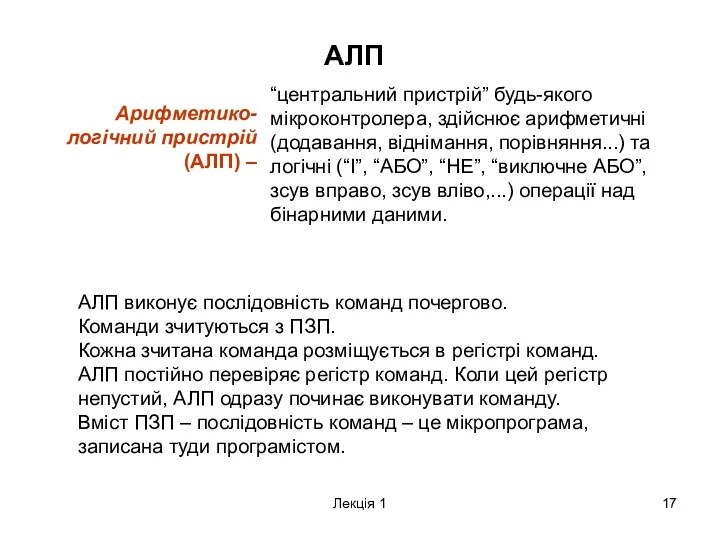
АЛП
АЛП виконує послідовність команд почергово.
Команди зчитуються з ПЗП.
Кожна
Лекція 1
АЛП
АЛП виконує послідовність команд почергово.
Команди зчитуються з ПЗП.
Кожна
Лекція 1
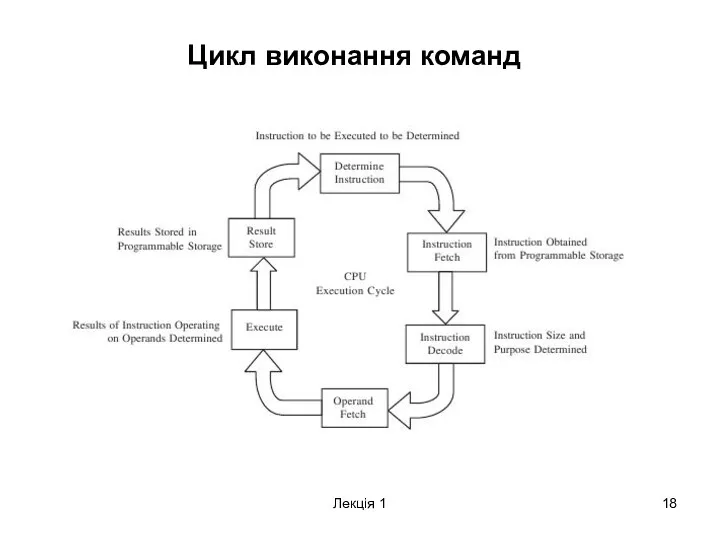
Цикл виконання команд
Лекція 1
Цикл виконання команд
Лекція 1
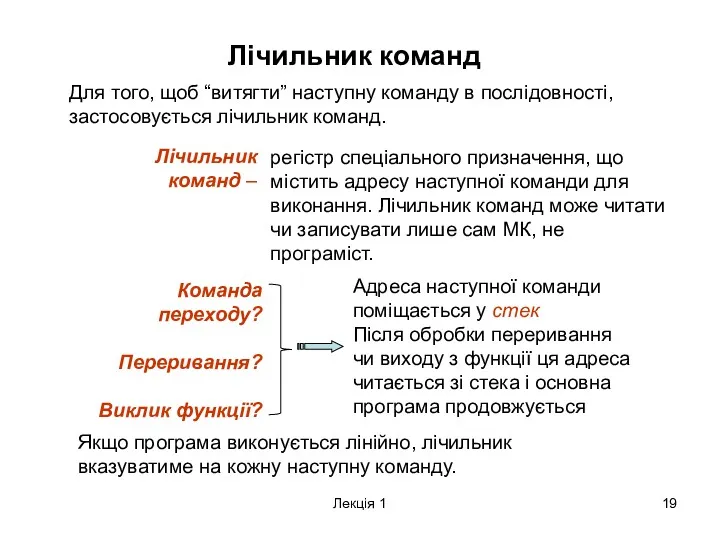
Лічильник команд
Для того, щоб “витягти” наступну команду в послідовності, застосовується
Лекція 1
Лічильник команд
Для того, щоб “витягти” наступну команду в послідовності, застосовується
Лекція 1
Розрядність АЛП
Розрядність АЛП –
визначає, якими числами оперує АЛП. Розрядність 16
Лекція 1
Розрядність АЛП
Розрядність АЛП –
визначає, якими числами оперує АЛП. Розрядність 16
Лекція 1
Регістри
Регістри –
Комірки оперативної пам’яті, до яких МК звертається більш короткими
Лекція 1
Регістри
Регістри –
Комірки оперативної пам’яті, до яких МК звертається більш короткими
Лекція 1
Порти вводу/виводу
Порт вводу/виводу МК –
іменована сукупність N виводів (синоніми виводу
Лекція 1
Порти вводу/виводу
Порт вводу/виводу МК –
іменована сукупність N виводів (синоніми виводу
Лекція 1
Таймери/лічильники
Таймер –
пристрій для формування часових інтервалів; цифровий лічильник, який рахує
Лекція 1
Таймери/лічильники
Таймер –
пристрій для формування часових інтервалів; цифровий лічильник, який рахує
Лекція 1
Додаткові функціональні блоки МК
Аналоговий компаратор –
пристрій для контролю напруги. Порівнює
Лекція 1
Додаткові функціональні блоки МК
Аналоговий компаратор –
пристрій для контролю напруги. Порівнює
Лекція 1
Шини мікроконтролера (1)
Функціональні блоки мікроконтролера обмінюються даними через шини.
Зокрема, дані
Лекція 1
Шини мікроконтролера (1)
Функціональні блоки мікроконтролера обмінюються даними через шини. Зокрема, дані
Лекція 1
Шини мікроконтролера (2)
Функціональні блоки МК обмінюються даними через шини.
Зокрема, дані
Лекція 1
Шини мікроконтролера (2)
Функціональні блоки МК обмінюються даними через шини. Зокрема, дані
Лекція 1
Архітектури мікроконтролера (1)
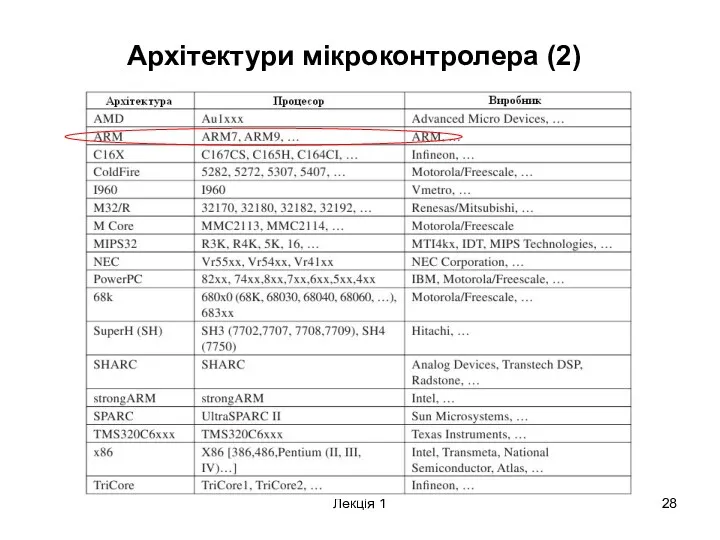
Є сотні мікроконтролерів, але всі їх можна поділити
Лекція 1
Архітектури мікроконтролера (1)
Є сотні мікроконтролерів, але всі їх можна поділити
Лекція 1
Архітектури мікроконтролера (2)
Лекція 1
Архітектури мікроконтролера (2)
Лекція 1
Організація пам’яті (1)
2 архітектури:
1. прінстонська архітектура (архітектура фон Неймана)
застосовує
Лекція 1
Організація пам’яті (1)
2 архітектури: 1. прінстонська архітектура (архітектура фон Неймана) застосовує
Лекція 1
Організація пам’яті (2)
Переваги гарвардської архітектури:
1. швидкий пошук операндів (даних).
Оскільки
Лекція 1
Організація пам’яті (2)
Переваги гарвардської архітектури: 1. швидкий пошук операндів (даних). Оскільки
Лекція 1
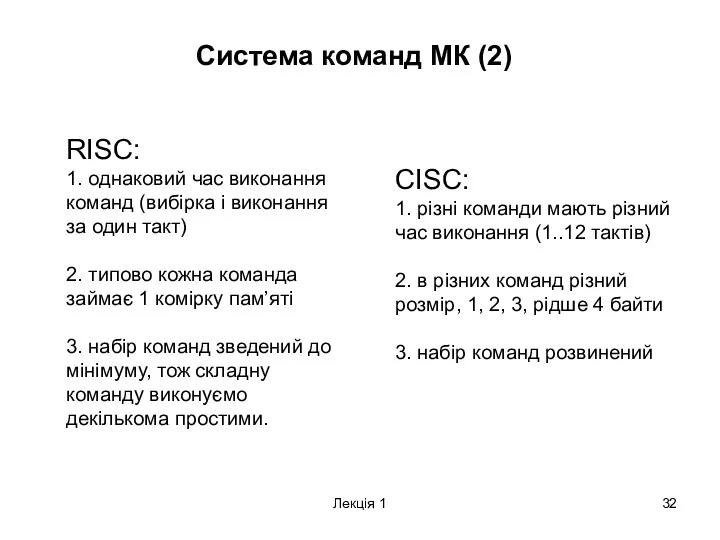
Система команд МК (1)
RISC & CISC:
1. CISC-архітектура (Complicated Instruction Set
Лекція 1
Система команд МК (1)
RISC & CISC: 1. CISC-архітектура (Complicated Instruction Set
Лекція 1
Система команд МК (2)
RISC:
1. однаковий час виконання
команд (вибірка і виконання
Лекція 1
Система команд МК (2)
RISC: 1. однаковий час виконання команд (вибірка і виконання
03.09.15 10:44
Лекція 1
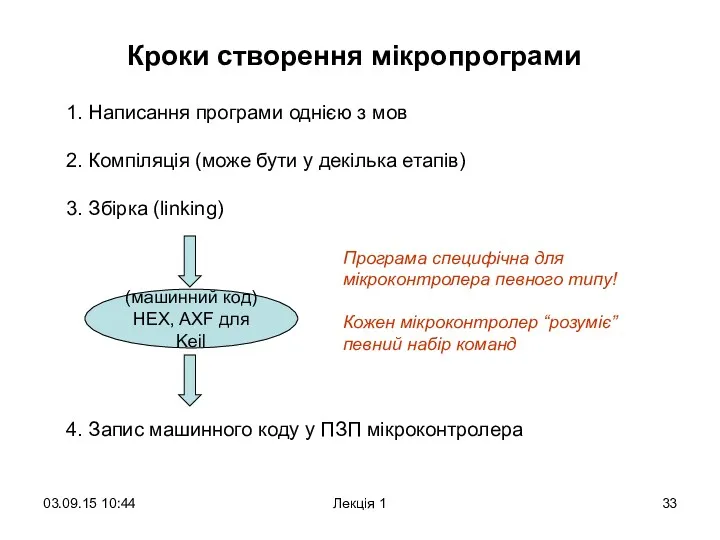
Кроки створення мікропрограми
1. Написання програми однією з мов
2. Компіляція
03.09.15 10:44
Лекція 1
Кроки створення мікропрограми
1. Написання програми однією з мов 2. Компіляція

Лекція 1
Програматори
Лекція 1
Програматори
Лекція 1
Тактова частота мікроконтролера
Робота блоків залежить від того, чи вони отримують
Лекція 1
Тактова частота мікроконтролера
Робота блоків залежить від того, чи вони отримують
Архітектура ARM
Продукт Acorn Computers, перший випуск — у 1982 р.
Інтерпретація: Acorn
Архітектура ARM
Продукт Acorn Computers, перший випуск — у 1982 р.
Інтерпретація: Acorn
Лекція 1
CMSIS
CMSIS –
Бібліотека, стандартна для всіх МК з ядром ARM Cortex.
Лекція 1
CMSIS
CMSIS –
Бібліотека, стандартна для всіх МК з ядром ARM Cortex.
Лекція 1
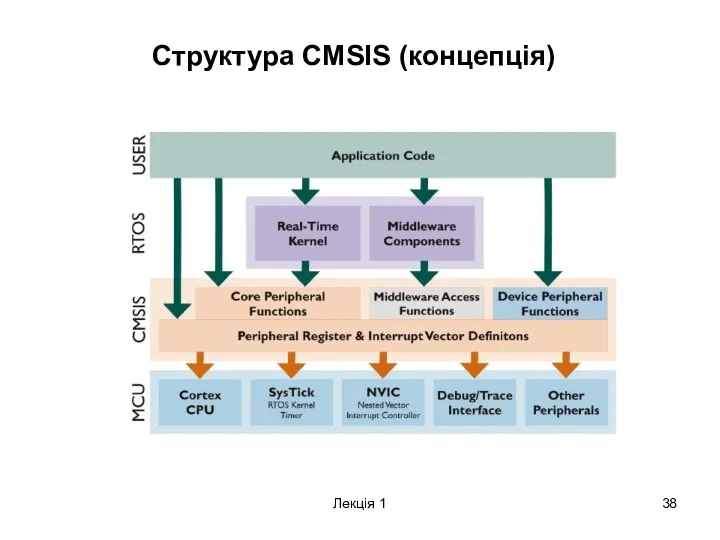
Структура CMSIS (концепція)
Лекція 1
Структура CMSIS (концепція)
Лекція 1
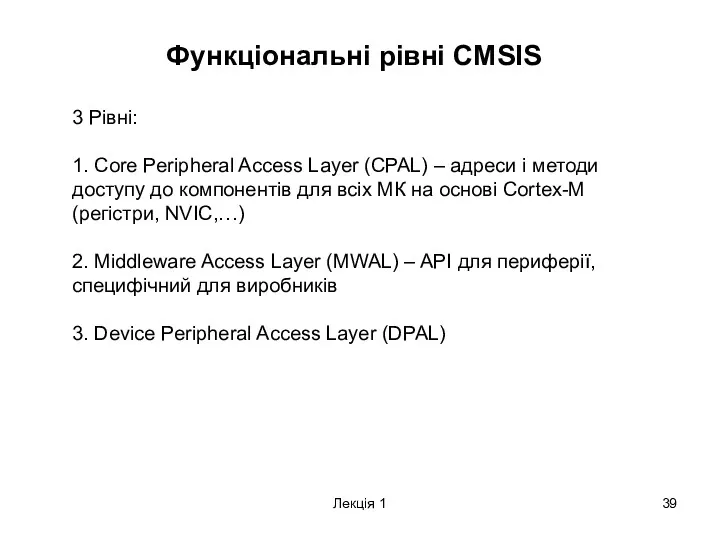
Функціональні рівні CMSIS
3 Рівні:
1. Core Peripheral Access Layer (CPAL) –
Лекція 1
Функціональні рівні CMSIS
3 Рівні: 1. Core Peripheral Access Layer (CPAL) –
Лекція 1
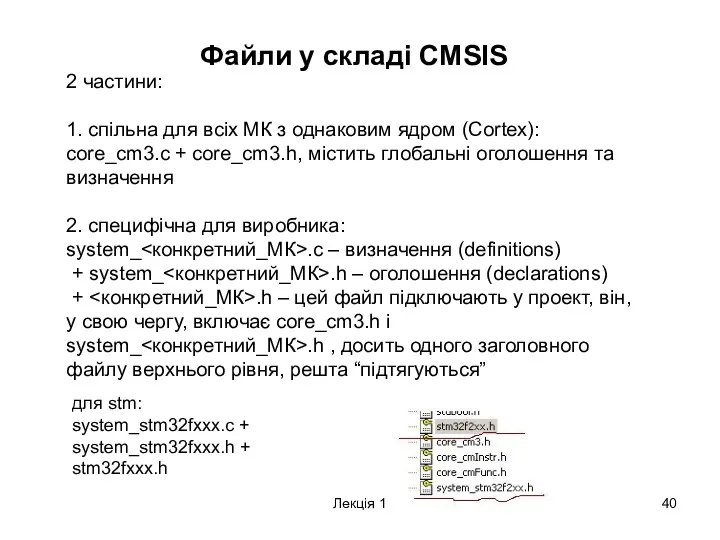
Файли у складі CMSIS
2 частини:
1. спільна для всіх МК з
Лекція 1
Файли у складі CMSIS
2 частини: 1. спільна для всіх МК з
Лекція 1
Файли у складі CMSIS (2)
system_<конкретний_МК>.h + system_<конкретний_МК>.с конфігурація System Clock
Лекція 1
Файли у складі CMSIS (2)
system_<конкретний_МК>.h + system_<конкретний_МК>.с конфігурація System Clock
Лекція 1
Startup
Містить:
первинну ініціалізацію МК
налаштування стека
занулення секції BSS
виклик функції main
Лекція 1
Startup
Містить:
первинну ініціалізацію МК
налаштування стека
занулення секції BSS
виклик функції main
Лекція 1
Оформлення коду у CMSIS
CMSIS дотримується Doxygen.
Doxygen – система документування коду,
Лекція 1
Оформлення коду у CMSIS
CMSIS дотримується Doxygen. Doxygen – система документування коду,
Лекція 1
CMSIS: stm32fxxx.h
Вміст файлу: структури з описом периферійних модулів +
Лекція 1
CMSIS: stm32fxxx.h
Вміст файлу: структури з описом периферійних модулів +
Лекція 1
Standard Peripherals Library (SPL)
SPL –
Бібліотека, створена STMicroelectronics для полегшення доступу
Лекція 1
Standard Peripherals Library (SPL)
SPL –
Бібліотека, створена STMicroelectronics для полегшення доступу
Лекція 1
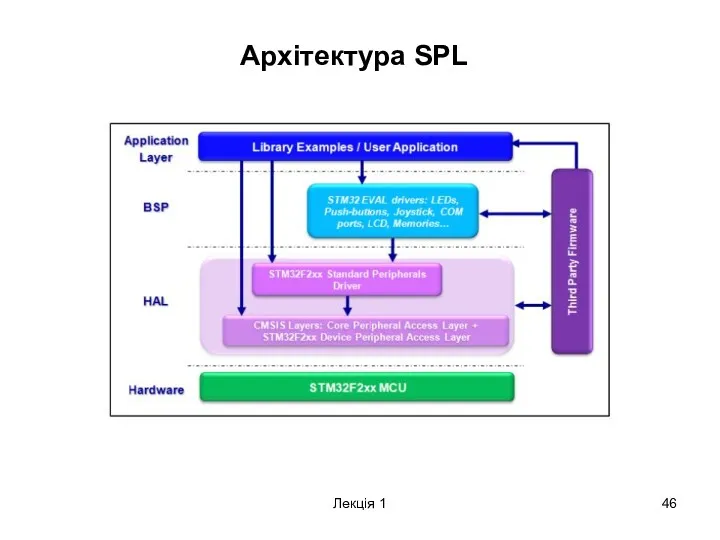
Архітектура SPL
Лекція 1
Архітектура SPL
Лекція 1
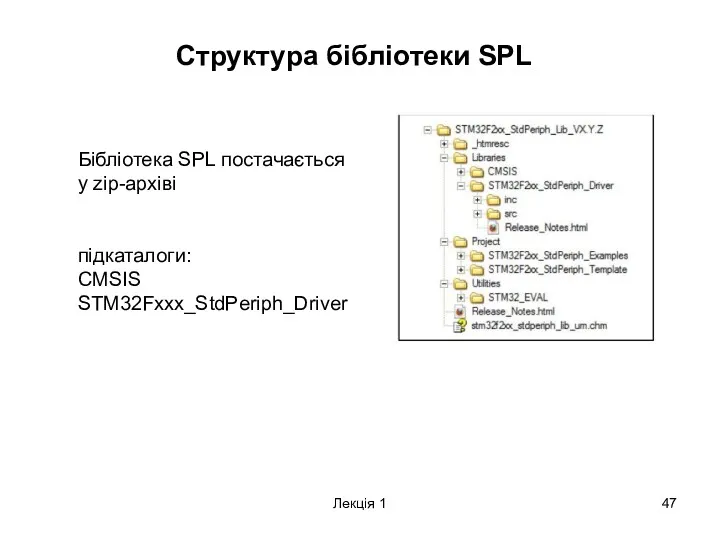
Структура бібліотеки SPL
Бібліотека SPL постачається у zip-архіві
підкаталоги:
CMSIS
STM32Fxxx_StdPeriph_Driver
Лекція 1
Структура бібліотеки SPL
Бібліотека SPL постачається у zip-архіві
підкаталоги:
CMSIS
STM32Fxxx_StdPeriph_Driver
Лекція 1
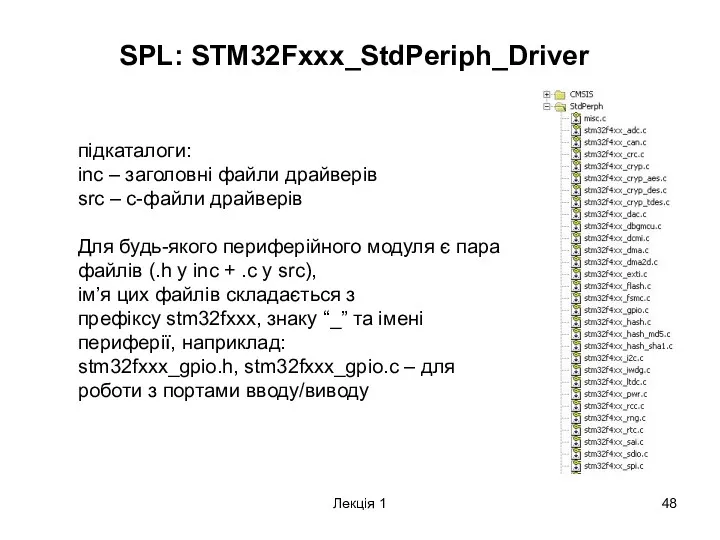
SPL: STM32Fxxx_StdPeriph_Driver
підкаталоги:
inc – заголовні файли драйверів
src – с-файли драйверів
Для будь-якого
Лекція 1
SPL: STM32Fxxx_StdPeriph_Driver
підкаталоги: inc – заголовні файли драйверів src – с-файли драйверів Для будь-якого
Лекція 1
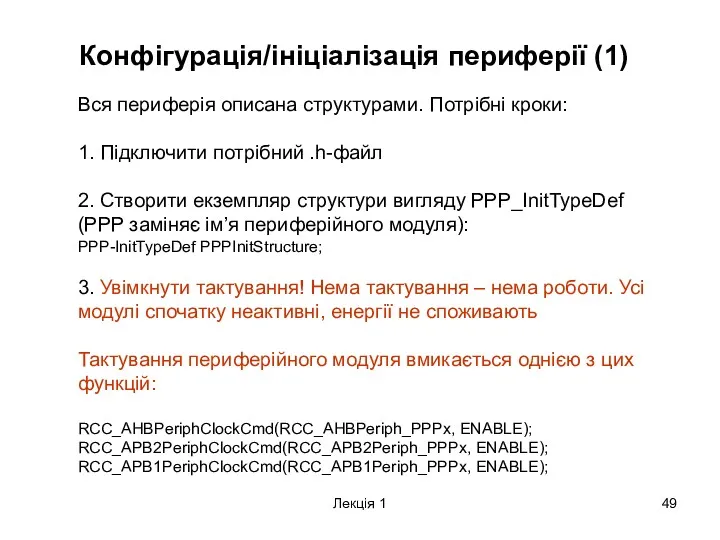
Конфігурація/ініціалізація периферії (1)
Вся периферія описана структурами. Потрібні кроки:
1. Підключити потрібний
Лекція 1
Конфігурація/ініціалізація периферії (1)
Вся периферія описана структурами. Потрібні кроки: 1. Підключити потрібний
Лекція 1
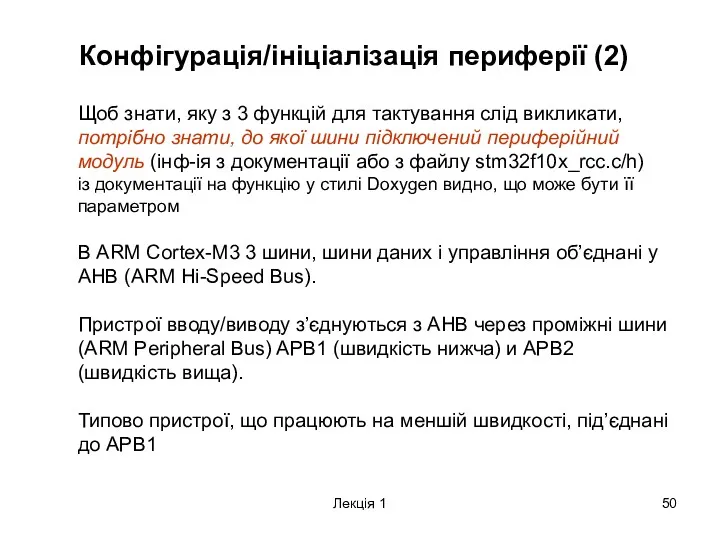
Конфігурація/ініціалізація периферії (2)
Щоб знати, яку з 3 функцій для тактування
Лекція 1
Конфігурація/ініціалізація периферії (2)
Щоб знати, яку з 3 функцій для тактування
Лекція 1
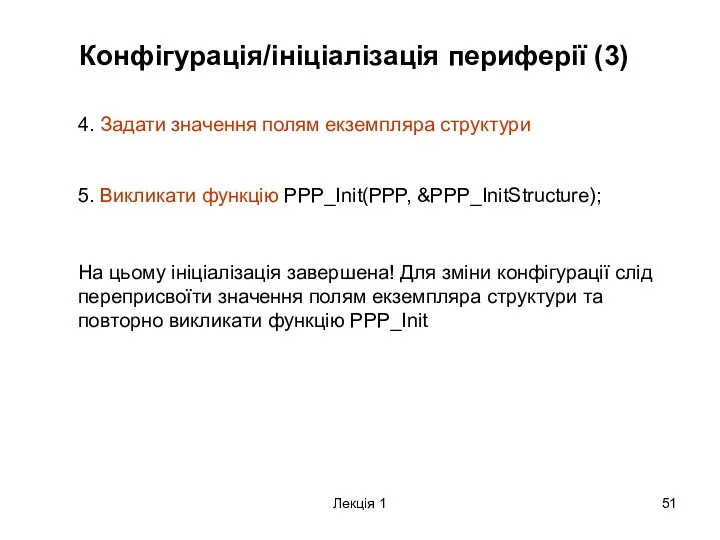
Конфігурація/ініціалізація периферії (3)
4. Задати значення полям екземпляра структури
5. Викликати функцію
Лекція 1
Конфігурація/ініціалізація периферії (3)
4. Задати значення полям екземпляра структури 5. Викликати функцію
Лекція 1
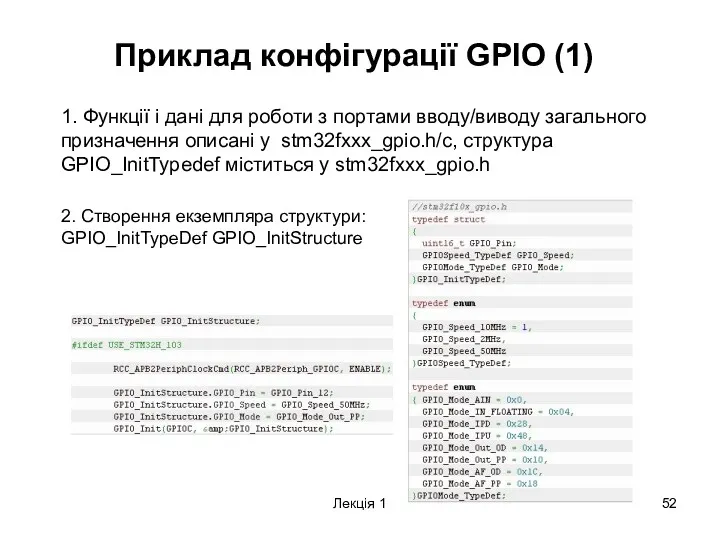
Приклад конфігурації GPIO (1)
1. Функції і дані для роботи з
Лекція 1
Приклад конфігурації GPIO (1)
1. Функції і дані для роботи з
Лекція 1
Приклад конфігурації GPIO (2)
3. Після увімкнення тактування однією з функцій
Лекція 1
Приклад конфігурації GPIO (2)
3. Після увімкнення тактування однією з функцій
 Экономика электронного бизнеса и информационных систем
Экономика электронного бизнеса и информационных систем Атрибуты deftemplate
Атрибуты deftemplate Адресація в Інтернеті
Адресація в Інтернеті Технологія графічних інтерфейсів у іграх
Технологія графічних інтерфейсів у іграх Криптография. Симметричные алгоритмы шифрования
Криптография. Симметричные алгоритмы шифрования Открытый урок по теме Метод координат
Открытый урок по теме Метод координат Индексация в СУБД
Индексация в СУБД Элемент управления ListBox. Строки в C#
Элемент управления ListBox. Строки в C# Регистрация на портале государственных услуг
Регистрация на портале государственных услуг Разработка клиентских веб-приложений
Разработка клиентских веб-приложений Future of technology and newest inventions
Future of technology and newest inventions Система AutoCAD
Система AutoCAD Теория формальных языков и грамматик. (Глава 2)
Теория формальных языков и грамматик. (Глава 2) Сравнение серверных операционных систем. Сетевые затруднения
Сравнение серверных операционных систем. Сетевые затруднения Проектирование баз данных. Концепция баз данных
Проектирование баз данных. Концепция баз данных Надежность информации. Основные определения
Надежность информации. Основные определения Основы систем счисления
Основы систем счисления Использование ИКТ, как средства повышения качества знаний учащихся на уроках английского языка
Использование ИКТ, как средства повышения качества знаний учащихся на уроках английского языка Безопасность информационных систем. Обеспечение безопасности компьютерных сетей
Безопасность информационных систем. Обеспечение безопасности компьютерных сетей Программы и программное обеспечение
Программы и программное обеспечение Теория автоматов и формальных языков. Лекция 7
Теория автоматов и формальных языков. Лекция 7 Моделирование и анализ бизнес-процессов
Моделирование и анализ бизнес-процессов Инфозапуски от А до Я
Инфозапуски от А до Я Увага! Надійшло наступне розпорядження. Стосується всіх користувачів ПК і ноутбуків в 6 ДПРЗ і підлеглих йому ДПРЧ
Увага! Надійшло наступне розпорядження. Стосується всіх користувачів ПК і ноутбуків в 6 ДПРЗ і підлеглих йому ДПРЧ Информационные процессы, информатизация общества и образования
Информационные процессы, информатизация общества и образования Основы языка HTML
Основы языка HTML Электронное правительство. Австрия
Электронное правительство. Австрия Инициация проекта
Инициация проекта