- Робот QUADRUPED

Содержание
- 2. ЦЕЛЬ РАБОТЫ СДЕЛАТЬ РОБОТА, КОТОРЫЙ БУДЕТ ОБХОДИТЬ ОБЪЕКТЫ
- 3. ВОЗМОЖНЫЕ ПРИМЕНЕНИЯ НА НЕГО МОЖНО ПОВЕСИТЬ ТРЯПКУ ИЛИ ПЫЛЕСОС, БУДЕТ ПРОСТЕЙШИЙ РОБОТ- УБОРЩИК ЭТО ЧАСТЬ ПРОМЫШЛЕННОГО
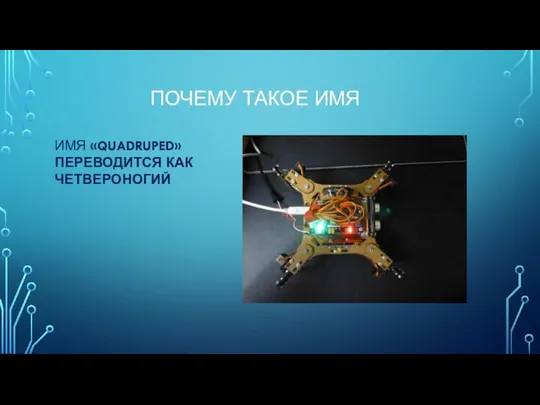
- 4. ПОЧЕМУ ТАКОЕ ИМЯ ИМЯ «QUADRUPED» ПЕРЕВОДИТСЯ КАК ЧЕТВЕРОНОГИЙ
- 5. КОНТРОЛЛЕР РОБОТА ARDUINO UNO GENUINO
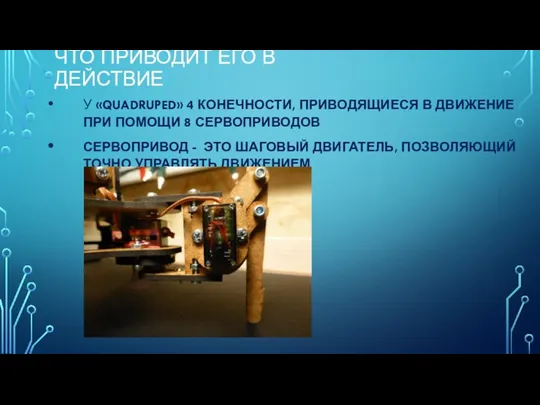
- 6. ЧТО ПРИВОДИТ ЕГО В ДЕЙСТВИЕ У «QUADRUPED» 4 КОНЕЧНОСТИ, ПРИВОДЯЩИЕСЯ В ДВИЖЕНИЕ ПРИ ПОМОЩИ 8 СЕРВОПРИВОДОВ
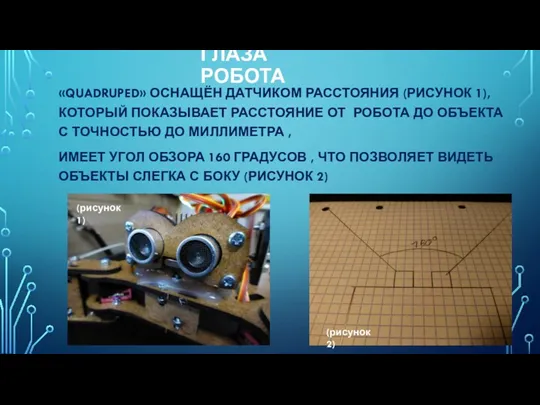
- 7. ГЛАЗА РОБОТА «QUADRUPED» ОСНАЩЁН ДАТЧИКОМ РАССТОЯНИЯ (РИСУНОК 1), КОТОРЫЙ ПОКАЗЫВАЕТ РАССТОЯНИЕ ОТ РОБОТА ДО ОБЪЕКТА С
- 8. АЛГОРИТМ РАБОТЫ 1) РОБОТ ИДЁТ ПРЯМО, ПОКА РАССТОЯНИЕ МЕЖДУ «QUADRUPED» И ОБЪЕКТОМ НЕ СТАНЕТ МЕНЕЕ 15
- 9. МОЖЕТ ПРИСЕДАТЬ И ВСТАВАТЬ
- 10. ПЕРВЫЕ ШАГИ НАПИСАВ ПРОБНУЮ ПРОГРАММУ, Я ПОЛУЧИЛ СЛЕДУЮЩИЙ РЕЗУЛЬТАТ:
- 11. НО ЦЕЛЬ ПРОЕКТА НЕ ДОСТИГНУТА РОБОТ ЕЩЁ НЕ МОЖЕТ САМОСТОЯТЕЛЬНО ОБХОДИТЬ ОБЪЕКТЫ ТОЛЬКО ПОД МОИМ УПРАВЛЕНИЕМ.
- 12. НОВЫЙ АЛГОРИТМ РОБОТ ИДЁТ ПРЯМО, ПОКА РАССТОЯНИЕ МЕЖДУ «QUADRUPED» И ОБЪЕКТОМ НЕ СТАНЕТ МЕНЕЕ 30 САНТИМЕТРОВ
- 13. ГОТОВЫЙ РОБОТ СЕЙЧАС МНЕ БЫ ХОТЕЛОСЬ ПРОДЕМОНСТРИРОВАТЬ МОЕГО РОБОТА
- 15. Скачать презентацию

ЦЕЛЬ РАБОТЫ
СДЕЛАТЬ РОБОТА, КОТОРЫЙ БУДЕТ ОБХОДИТЬ ОБЪЕКТЫ
ЦЕЛЬ РАБОТЫ
СДЕЛАТЬ РОБОТА, КОТОРЫЙ БУДЕТ ОБХОДИТЬ ОБЪЕКТЫ
ВОЗМОЖНЫЕ ПРИМЕНЕНИЯ
НА НЕГО МОЖНО ПОВЕСИТЬ ТРЯПКУ ИЛИ ПЫЛЕСОС, БУДЕТ ПРОСТЕЙШИЙ
ВОЗМОЖНЫЕ ПРИМЕНЕНИЯ
НА НЕГО МОЖНО ПОВЕСИТЬ ТРЯПКУ ИЛИ ПЫЛЕСОС, БУДЕТ ПРОСТЕЙШИЙ
ПОЧЕМУ ТАКОЕ ИМЯ
ИМЯ «QUADRUPED» ПЕРЕВОДИТСЯ КАК ЧЕТВЕРОНОГИЙ
ПОЧЕМУ ТАКОЕ ИМЯ
ИМЯ «QUADRUPED» ПЕРЕВОДИТСЯ КАК ЧЕТВЕРОНОГИЙ

КОНТРОЛЛЕР РОБОТА
ARDUINO UNO GENUINO
КОНТРОЛЛЕР РОБОТА
ARDUINO UNO GENUINO
ЧТО ПРИВОДИТ ЕГО В ДЕЙСТВИЕ
У «QUADRUPED» 4 КОНЕЧНОСТИ, ПРИВОДЯЩИЕСЯ В
ЧТО ПРИВОДИТ ЕГО В ДЕЙСТВИЕ
У «QUADRUPED» 4 КОНЕЧНОСТИ, ПРИВОДЯЩИЕСЯ В
ГЛАЗА РОБОТА
«QUADRUPED» ОСНАЩЁН ДАТЧИКОМ РАССТОЯНИЯ (РИСУНОК 1), КОТОРЫЙ ПОКАЗЫВАЕТ РАССТОЯНИЕ
ГЛАЗА РОБОТА
«QUADRUPED» ОСНАЩЁН ДАТЧИКОМ РАССТОЯНИЯ (РИСУНОК 1), КОТОРЫЙ ПОКАЗЫВАЕТ РАССТОЯНИЕ
АЛГОРИТМ РАБОТЫ
1) РОБОТ ИДЁТ ПРЯМО, ПОКА РАССТОЯНИЕ МЕЖДУ «QUADRUPED» И
АЛГОРИТМ РАБОТЫ
1) РОБОТ ИДЁТ ПРЯМО, ПОКА РАССТОЯНИЕ МЕЖДУ «QUADRUPED» И
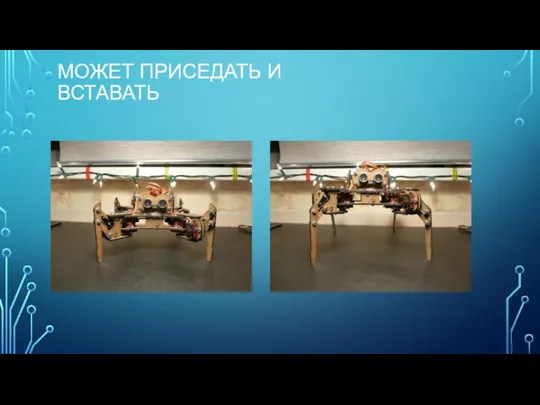
МОЖЕТ ПРИСЕДАТЬ И ВСТАВАТЬ
МОЖЕТ ПРИСЕДАТЬ И ВСТАВАТЬ

ПЕРВЫЕ ШАГИ
НАПИСАВ ПРОБНУЮ ПРОГРАММУ, Я ПОЛУЧИЛ СЛЕДУЮЩИЙ РЕЗУЛЬТАТ:
ПЕРВЫЕ ШАГИ
НАПИСАВ ПРОБНУЮ ПРОГРАММУ, Я ПОЛУЧИЛ СЛЕДУЮЩИЙ РЕЗУЛЬТАТ:
НО ЦЕЛЬ ПРОЕКТА НЕ ДОСТИГНУТА
РОБОТ ЕЩЁ НЕ МОЖЕТ САМОСТОЯТЕЛЬНО ОБХОДИТЬ
НО ЦЕЛЬ ПРОЕКТА НЕ ДОСТИГНУТА
РОБОТ ЕЩЁ НЕ МОЖЕТ САМОСТОЯТЕЛЬНО ОБХОДИТЬ
НОВЫЙ АЛГОРИТМ
РОБОТ ИДЁТ ПРЯМО, ПОКА РАССТОЯНИЕ МЕЖДУ «QUADRUPED» И ОБЪЕКТОМ
НОВЫЙ АЛГОРИТМ
РОБОТ ИДЁТ ПРЯМО, ПОКА РАССТОЯНИЕ МЕЖДУ «QUADRUPED» И ОБЪЕКТОМ
ГОТОВЫЙ РОБОТ
СЕЙЧАС МНЕ БЫ ХОТЕЛОСЬ ПРОДЕМОНСТРИРОВАТЬ МОЕГО РОБОТА
ГОТОВЫЙ РОБОТ
СЕЙЧАС МНЕ БЫ ХОТЕЛОСЬ ПРОДЕМОНСТРИРОВАТЬ МОЕГО РОБОТА
 презентация Основы классификации (объектов)
презентация Основы классификации (объектов) Программирование на языке Python. Символьные строки
Программирование на языке Python. Символьные строки Отчет по продвижению в социальных сетях Oson
Отчет по продвижению в социальных сетях Oson Графический редактор Paint
Графический редактор Paint Макрорекордер (MacroRecorder)
Макрорекордер (MacroRecorder) Голосовое управление в облачных веб-проектах с помощью Яндекс.Станции и Google Assistant
Голосовое управление в облачных веб-проектах с помощью Яндекс.Станции и Google Assistant Компоненты в React. Урок №1
Компоненты в React. Урок №1 Правовые и этические аспекты использования интернета
Правовые и этические аспекты использования интернета Аудитория интернета в России
Аудитория интернета в России Internet etikasi va odob-axloq qoidalari
Internet etikasi va odob-axloq qoidalari Информационная безопасность
Информационная безопасность Технологія та організація створення електронного підручника за допомогою програми Dr. Explain
Технологія та організація створення електронного підручника за допомогою програми Dr. Explain Анимация в WinForms
Анимация в WinForms Основы системного администрирования и сетевых технологий. Домашняя работа №1
Основы системного администрирования и сетевых технологий. Домашняя работа №1 Моменты, на которые нужно обратить внимание. Защитное программирование. Модульное тестирование
Моменты, на которые нужно обратить внимание. Защитное программирование. Модульное тестирование IP-телефония мен стримингтік технологиялар негіздері
IP-телефония мен стримингтік технологиялар негіздері Моделирование в системе компас
Моделирование в системе компас History of Cologne Digital Lexicons
History of Cologne Digital Lexicons Опасности в интернете
Опасности в интернете Введение. Компиляция и запуск. (Тема 1.2)
Введение. Компиляция и запуск. (Тема 1.2) Статичні члени класів
Статичні члени класів Компьютерная анимация
Компьютерная анимация Язык GPSS. Изменение маршрутов транзактов. Вычислительные объекты языка
Язык GPSS. Изменение маршрутов транзактов. Вычислительные объекты языка Формат. История развития термина
Формат. История развития термина Виды изображений. Растровая и векторная графика
Виды изображений. Растровая и векторная графика Создание HTML. Примеры тегов с атрибутами
Создание HTML. Примеры тегов с атрибутами 2. Java Basics. Data Types
2. Java Basics. Data Types Разработка программы для управления устройством умного дома
Разработка программы для управления устройством умного дома