- Структура системы цифровой обработки аналоговых сигналов

Содержание
- 2. Типовые задачи цифровой обработки сигналов 1) Цифровая фильтрация: - фильтры с конечными импульсными характеристиками (КИХ); -
- 3. Скалярное произведение векторов (сумма поэлементных произведений) x(i), y(i) – элементы целочисленных массивов x[0 .. N-1], y[0..N-1];
- 4. Корреляционный анализ x(n - j) –дискретный отсчет задержанного сигнала x(t - τ); y(n) - дискретный отсчет
- 5. Нерекурсивный фильтр (КИХ)
- 6. Рекурсивный фильтр (БИХ)
- 7. Дискретное преобразование Фурье (ДПФ)
- 8. Обработка звуковых сигналов, распознавание речи, обработка сигналов в других частотных диапазонах, обработка изображений, распознавание образов, пропорциональное
- 9. Автоматическое управление в электроприводах
- 10. Управление инвертором
- 11. Контур автоматического управления инвертором
- 12. Сигнальные процессоры оптимизированы по быстродействию для выполнения: операций «умножение с накоплением» (англ. multiply-accumulate, MAC) Y =
- 13. Популярные модели ЦСП TI Inc. TMS32010 1983 г. 16-разрядный ЦСП с фиксированной точкой Семейство TMS32C1x. TMS32C2x
- 14. ЦСП 1892ВМ7Я (“Элвис”) платформа «МУЛЬТИКОР» int32: 6400 Моп/с, 32 операции за 1 такт; int16: 25600 Моп/с,
- 15. Модифицированная Гарвардская архитектура
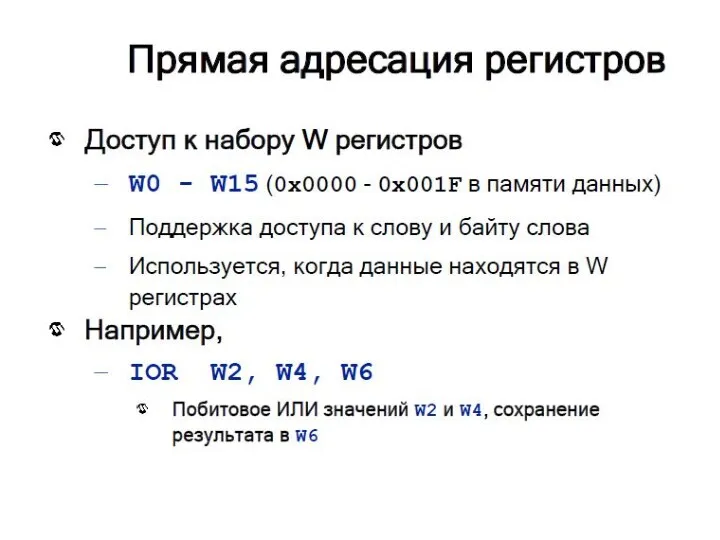
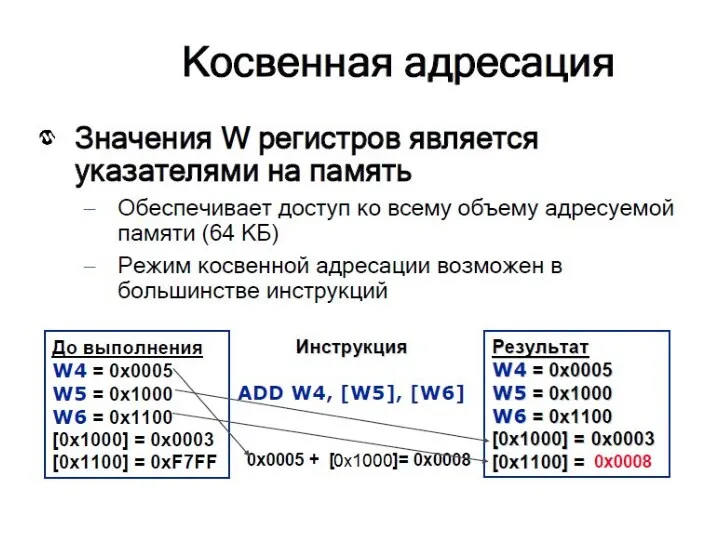
- 16. Архитектура dsPIC
- 28. Ядро DSP
- 29. Инструкции ядра MAC
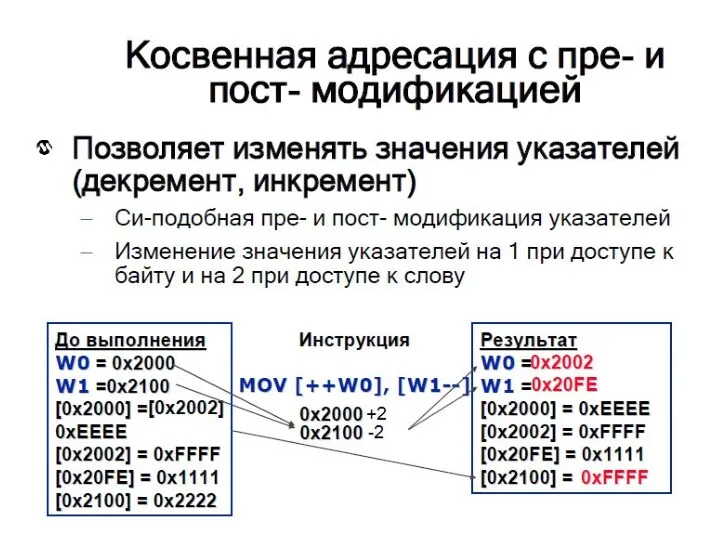
- 32. Циклический буфер (модульная адресация) XMODSRT = (unsigned int) array1; XMODEND = (unsigned int) array1 + 2*LEN
- 33. Назначение регистров: w3 – (LEN-1) w2 – указатель для массива значений функции R(n) w1 – указатель
- 34. R(0) = y(0)·x(0) + y(1)·x(1) + y(2)·x(2) + y(3)·x(3) R(1) = y(3)·x(0) + y(0)·x(1) + y(1)·x(2)
- 35. Цикл вычисления R[n] DO w3, array_loop ; цикл обработки всех входных выборок ; очистка A, выборка
- 36. typedef struct { int numTaps; // число коэффициентов int *pTapsBase; // базовый адрес массива коэффициентов //
- 37. Циклический буфер (модульная адресация) SetupPointers: MOV [w3+oTapsEnd],w8 MOV w8, XMODEND ; XMODEND = конечный адрес коэффициентов
- 38. y(0) = b0·x(0) + b1·x(-1) + b2·x(-2) + b3·x(-3) y(1) = b0·x(1) + b1·x(0) + b2·x(-1)
- 39. Назначение регистров: w3 – указатель на структуру FIR фильтра w2 – указатель на буфер входных отсчетов
- 40. Цикл вычисления y[n] DO w0, blockLoop ; цикл обработки всех входных выборок MOV [w2++],[w10] ; сохранение
- 41. Реализация БИХ-фильтра Массив коэффициентов Coefs .section .xdata, data, xmemory .section .psvconst, code Буферы состояний States1, States2
- 42. Назначение регистров: w3 – указатель на структуру БИХ фильтра w2 – указатель на буфер входных отсчетов
- 43. _IIRTransposed: ; сохранение контекста ; инициализация рабочих регистров ; инициализация указателей DO w0, transposeBlockLoop ; внешний
- 44. DO w4, transposeSectionLoop ; внутренний цикл (по числу секций) MAC w5*w6, a, [w8]+=2, w5 LAC [w11],
- 45. Дискретное преобразование Фурье
- 46. 8-точечное ДПФ (N=8)
- 49. Операция «бабочка»
- 50. Алгоритм 8-точечного БПФ
- 51. Упорядочивание элементов массива (бит-реверсная адресация)
- 52. int output[64]; // выходной массив фильтра int i; // переменная цикла #define FFT_BLOCK_LENGTH 64 // длина
- 53. Функции программы (API) IIRTransposedInit(&Filter); //инициализация структуры фильтра TwidFactorInit (LOG2_BLOCK_LENGTH, &twiddleFactors[0], 0); //инициализация массива коэффициентов IIRTransposed(64, output,
- 54. Структура стенда Starter Kit for dsPIC DSC
- 55. Периферийные модули dsPIC
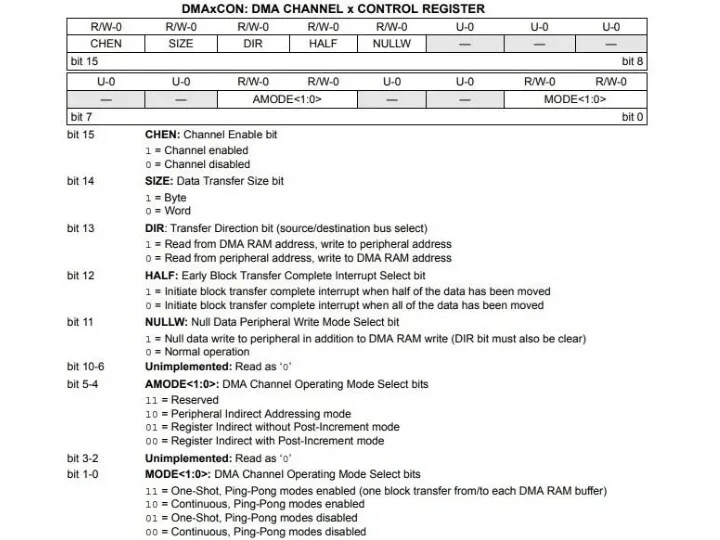
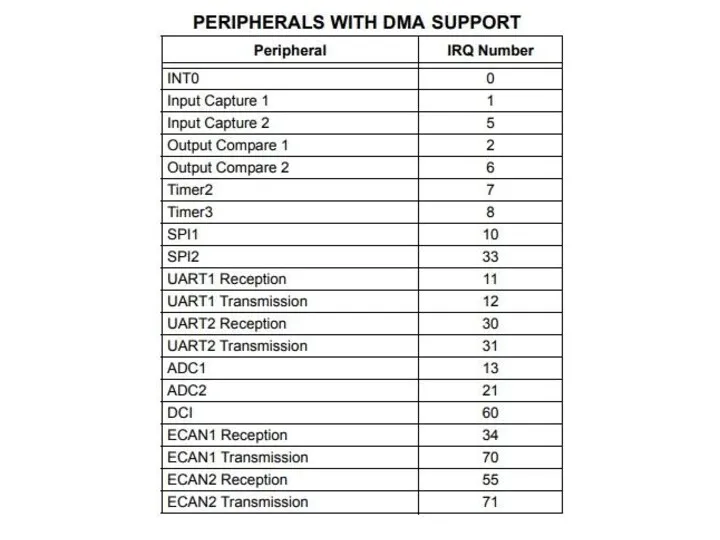
- 56. Модуль сравнения в режиме ШИМ
- 66. Лабораторная работа 6 //Структура для обработчика sOCPWMHandle typedef struct sOCPWMHandle { int * buffer1; /* указатель
- 67. // Функции API void OCPWMInit (OCPWMHandle * pHandle,int * pBufferInDMA); OCPWMInit (pOCPWMHandle, ocPWMBuffer); // инициализация OCPWM
- 68. /* Функция инициализации DMA1 и ШИМ */ void OCPWMInit (OCPWMHandle * pHandle,int * pBufferInDMA) { thisOCPWM
- 69. // Функция включения модуля OCPWM void OCPWMStart (OCPWMHandle * pHandle) { pHandle-> bufferIndicator= 0; pHandle-> currentSampleIndex
- 70. // Функция вывода ШИМ сигнала void OCPWMWrite (OCPWMHandle * pHandle,int *data,int size, unsigned char gain) {
- 71. // Функция анализа состояния канала вывода int OCPWMIsBusy (OCPWMHandle * pHandle) { return(pHandle->isWriteBusy); } //Обработчик прерывания
- 72. // Главная функция программы int main(void) { /* Операторы настройки тактового генератора на частоту 40MHz. */
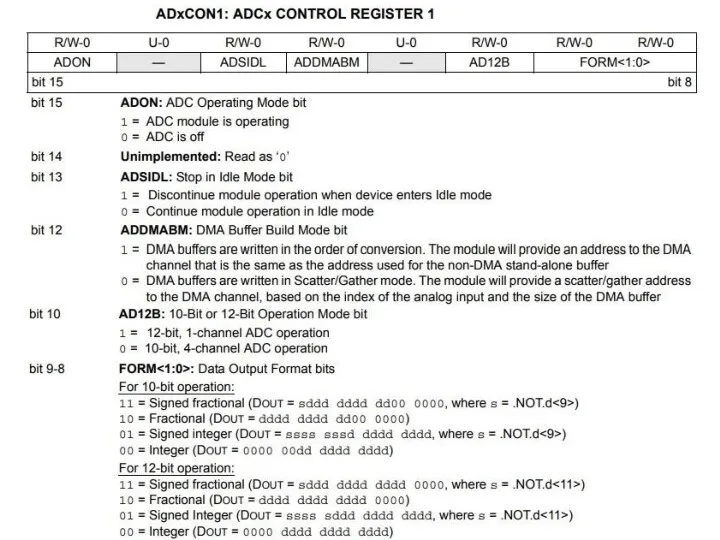
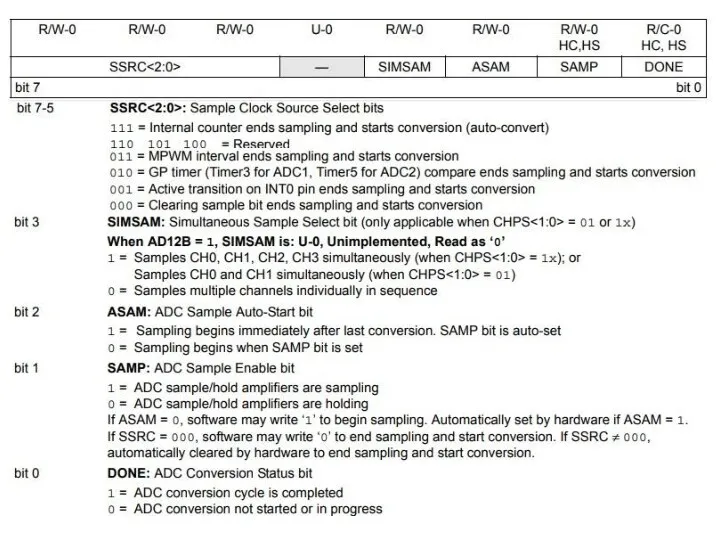
- 73. Аналого-цифровой преобразователь (режим 12 разрядов)
- 76. Лабораторная работа 7 //Константы #define ADC_CHANNEL_FCY 40000000 #define ADC_FSAMP 8000 /* Sampling Frequency */ #define ADC_BUFFER_SIZE
- 77. // Функции API void ADCChannelInit (ADCChannelHandle * pHandle,int * pBufferInDMA); void ADCChannelStart (ADCChannelHandle * pHandle); void
- 78. // Функция инициализации модуля АЦП и канала DMA static ADCChannelHandle * thisADCChannel; void ADCChannelInit (ADCChannelHandle *
- 79. DMA0STA = (int)(pHandle->buffer1) - (int)&_DMA_BASE; DMA0STB = (int)(pHandle->buffer2) - (int)&_DMA_BASE; DMA0PAD = (int )&ADC1BUF0; DMA0CNT =
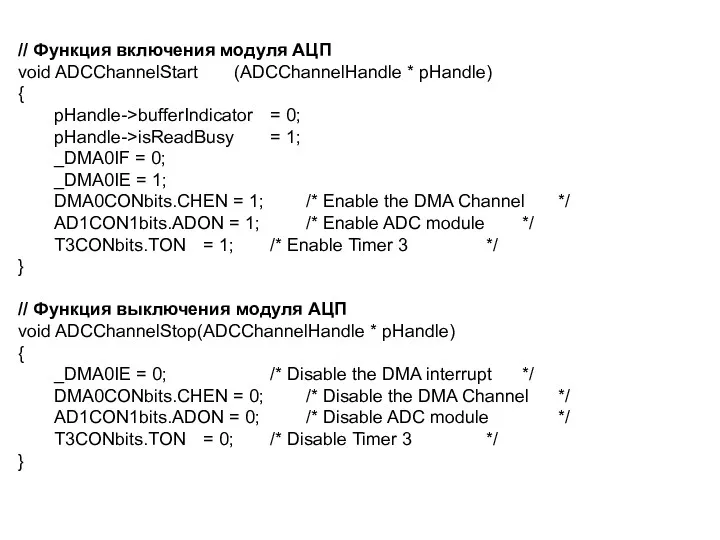
- 80. // Функция включения модуля АЦП void ADCChannelStart (ADCChannelHandle * pHandle) { pHandle->bufferIndicator = 0; pHandle->isReadBusy =
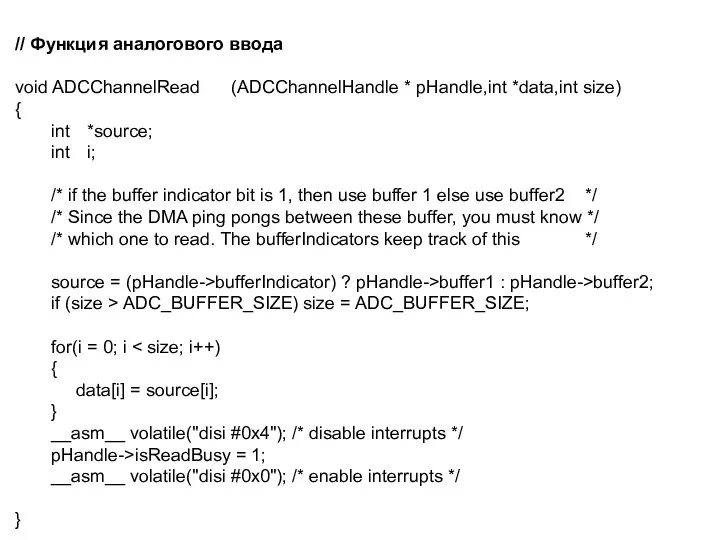
- 81. // Функция аналогового ввода void ADCChannelRead (ADCChannelHandle * pHandle,int *data,int size) { int *source; int i;
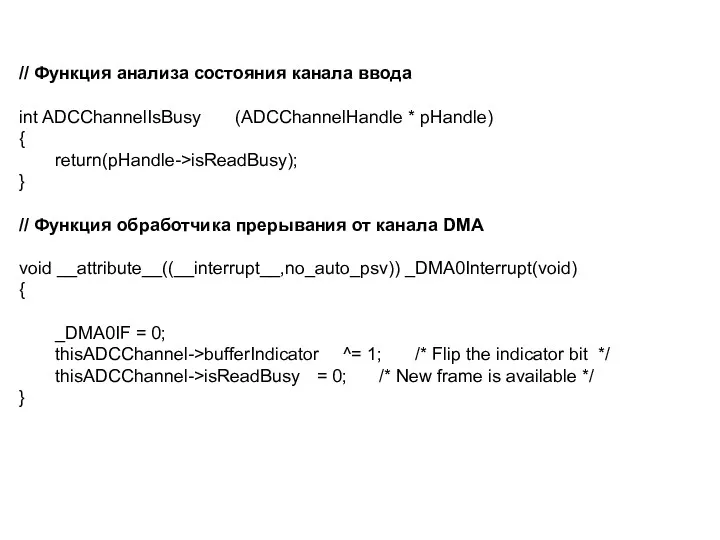
- 82. // Функция анализа состояния канала ввода int ADCChannelIsBusy (ADCChannelHandle * pHandle) { return(pHandle->isReadBusy); } // Функция
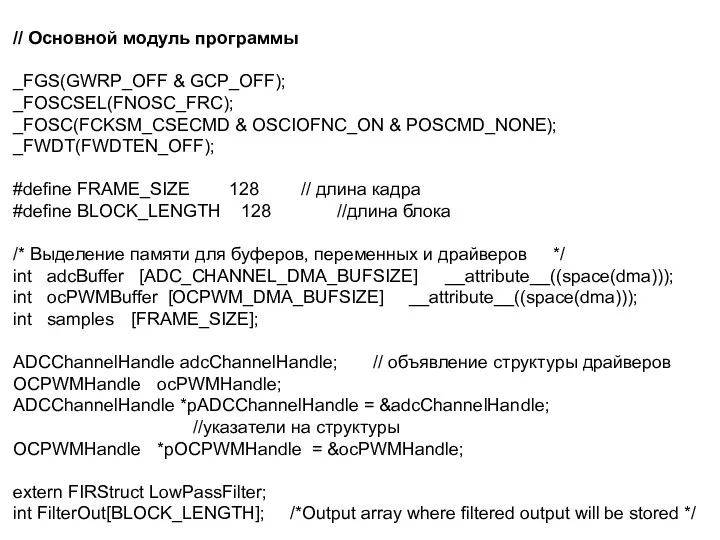
- 83. // Основной модуль программы _FGS(GWRP_OFF & GCP_OFF); _FOSCSEL(FNOSC_FRC); _FOSC(FCKSM_CSECMD & OSCIOFNC_ON & POSCMD_NONE); _FWDT(FWDTEN_OFF); #define FRAME_SIZE
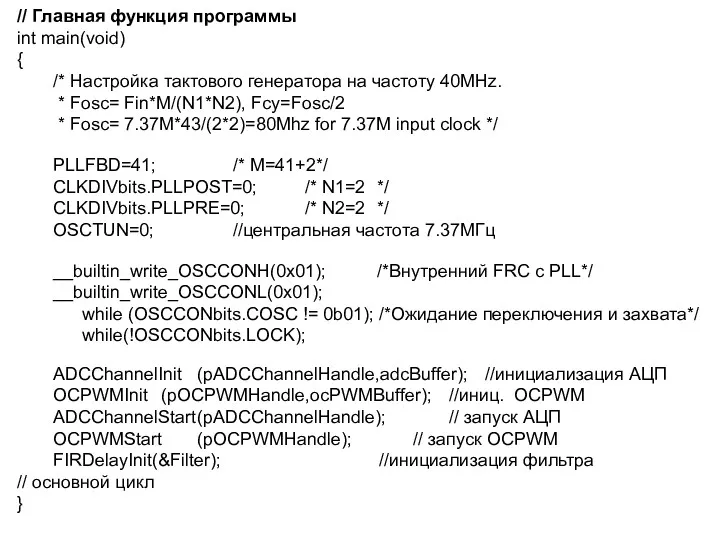
- 84. // Главная функция программы int main(void) { /* Настройка тактового генератора на частоту 40MHz. * Fosc=
- 85. // основной цикл while(1) { /* Ожидание доступности канала ввода для нового кадра */ while(ADCChannelIsBusy(pADCChannelHandle)); /*
- 86. Аудиокодек WM8510
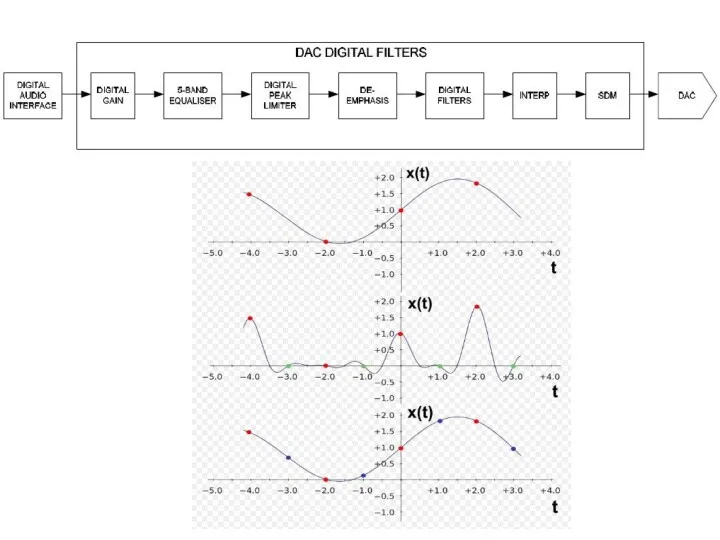
- 87. Передискретизация
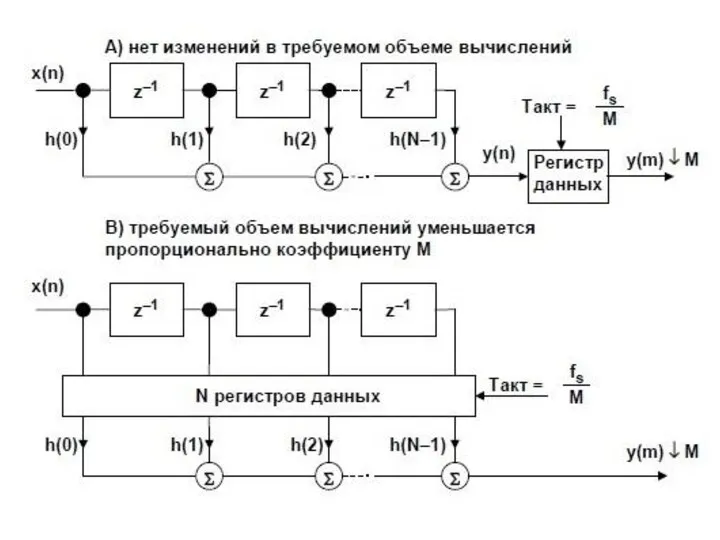
- 88. Децимация
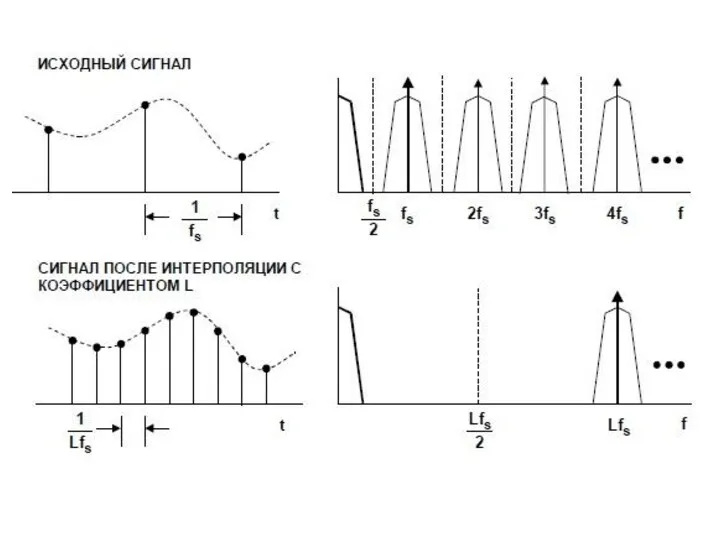
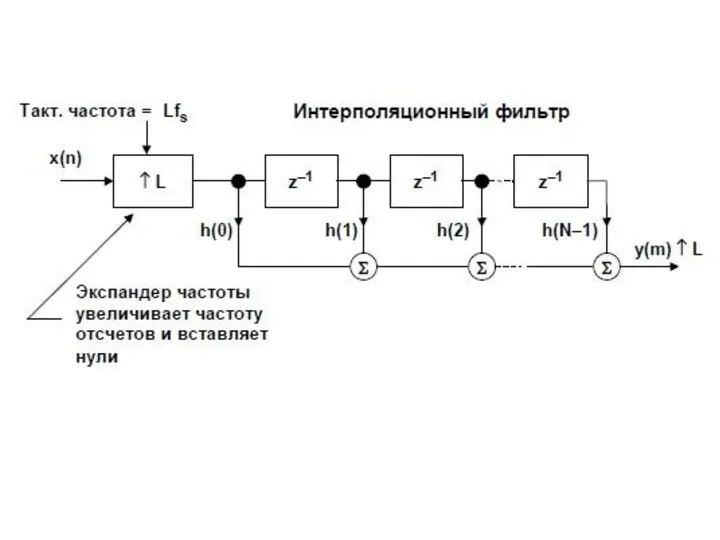
- 91. Интерполяция
- 94. Интерфейс I2S
- 95. typedef struct sWM8510Handle { int * inputBuffer1; /* Ping Pong Input Buffer 1 */ int *
- 96. void WM8510Read(WM8510Handle * pHandle, int * data, int size) { int * source; int sampleIndex; if((pHandle->statusFlag
- 97. void WM8510Write(WM8510Handle * pHandle, int * data, int size) { int* destination; int sampleIndex; if((pHandle->statusFlag &
- 99. Скачать презентацию
Типовые задачи
цифровой обработки сигналов
1) Цифровая фильтрация:
- фильтры с конечными импульсными
характеристиками
Типовые задачи
цифровой обработки сигналов
1) Цифровая фильтрация:
- фильтры с конечными импульсными
характеристиками
Скалярное произведение векторов
(сумма поэлементных произведений)
x(i), y(i) – элементы целочисленных массивов
Скалярное произведение векторов
(сумма поэлементных произведений)
x(i), y(i) – элементы целочисленных массивов
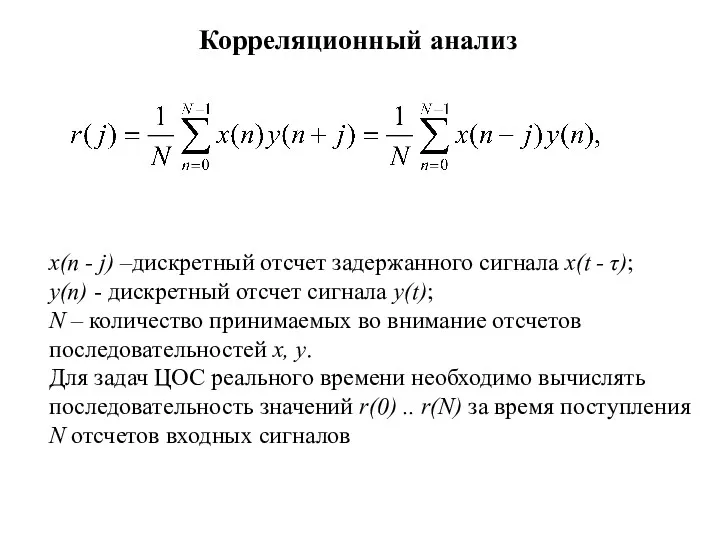
Корреляционный анализ
x(n - j) –дискретный отсчет задержанного сигнала x(t - τ);
y(n)
Корреляционный анализ
x(n - j) –дискретный отсчет задержанного сигнала x(t - τ);
y(n)
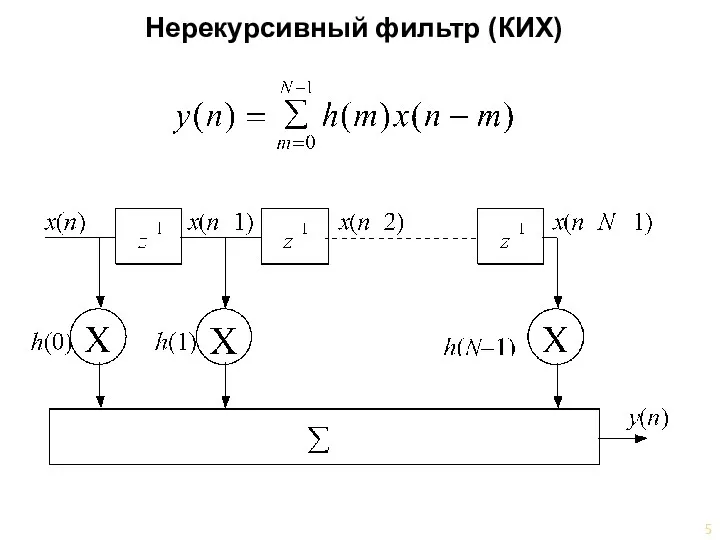
Нерекурсивный фильтр (КИХ)
Нерекурсивный фильтр (КИХ)
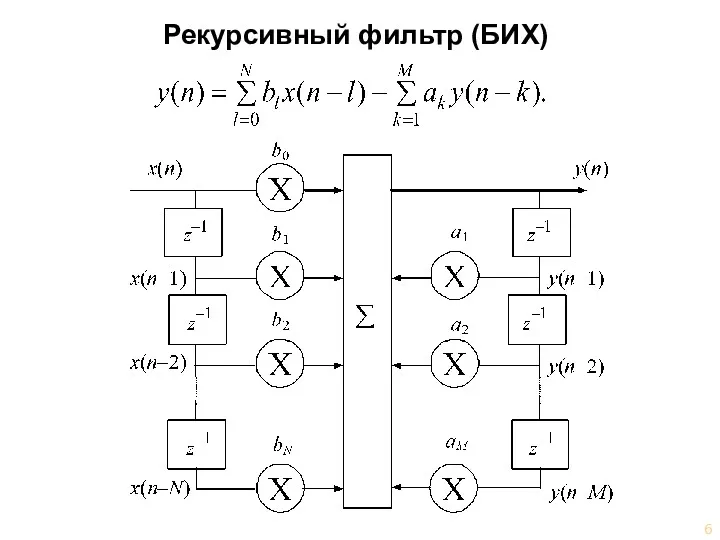
Рекурсивный фильтр (БИХ)
Рекурсивный фильтр (БИХ)
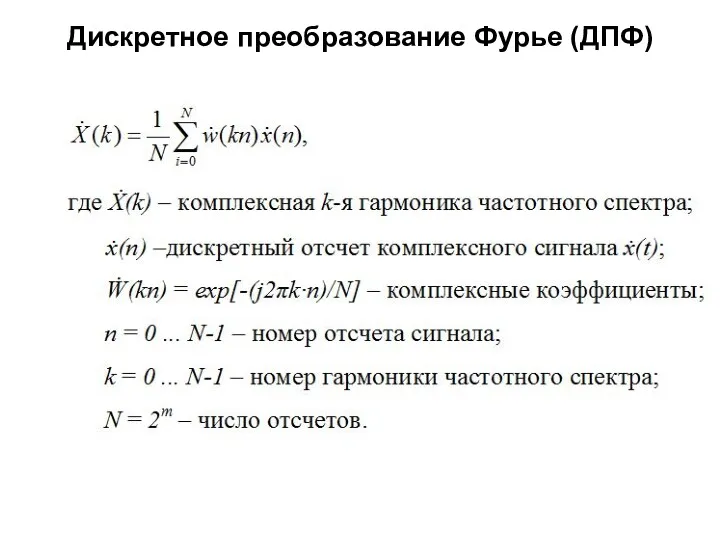
Дискретное преобразование Фурье (ДПФ)
Дискретное преобразование Фурье (ДПФ)
Обработка звуковых сигналов,
распознавание речи,
обработка сигналов в других частотных диапазонах,
обработка
Обработка звуковых сигналов,
распознавание речи,
обработка сигналов в других частотных диапазонах,
обработка
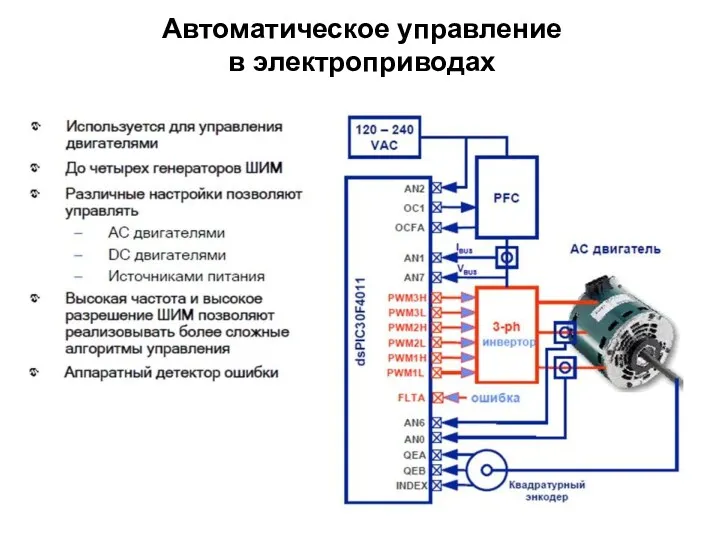
Автоматическое управление в электроприводах
Автоматическое управление в электроприводах

Управление инвертором
Управление инвертором

Контур автоматического управления инвертором
Контур автоматического управления инвертором
Сигнальные процессоры оптимизированы по быстродействию для выполнения:
операций «умножение с накоплением» (англ.
Сигнальные процессоры оптимизированы по быстродействию для выполнения:
операций «умножение с накоплением» (англ.
Популярные модели ЦСП
TI Inc.
TMS32010 1983 г. 16-разрядный ЦСП с фиксированной точкой
Семейство
Популярные модели ЦСП
TI Inc.
TMS32010 1983 г. 16-разрядный ЦСП с фиксированной точкой
Семейство
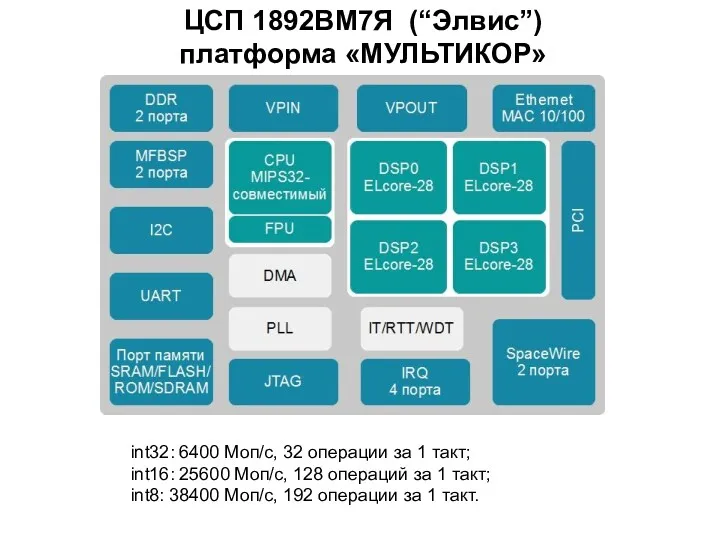
ЦСП 1892ВМ7Я (“Элвис”)
платформа «МУЛЬТИКОР»
int32: 6400 Моп/с, 32 операции за 1
ЦСП 1892ВМ7Я (“Элвис”)
платформа «МУЛЬТИКОР»
int32: 6400 Моп/с, 32 операции за 1
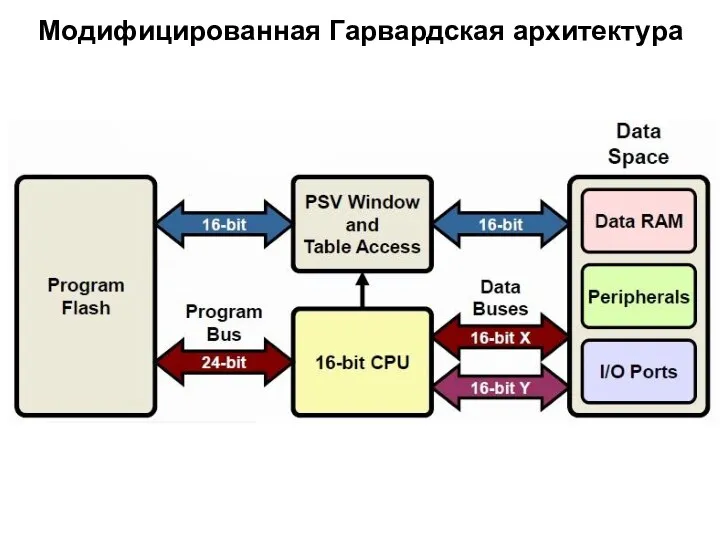
Модифицированная Гарвардская архитектура
Модифицированная Гарвардская архитектура
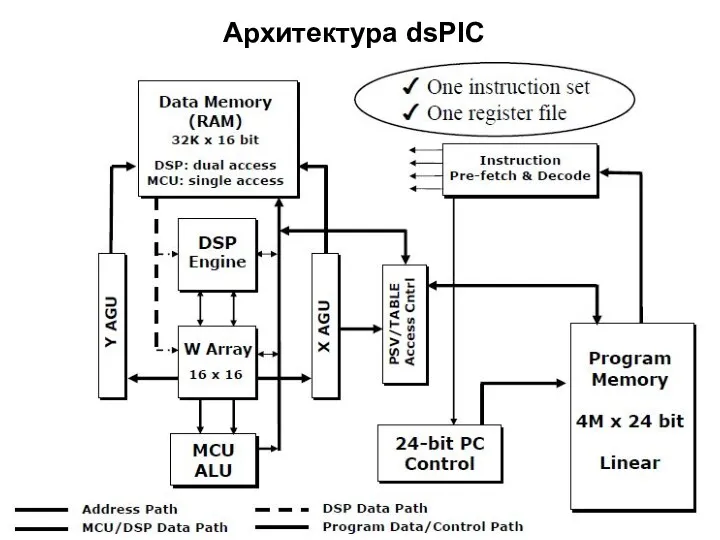
Архитектура dsPIC
Архитектура dsPIC
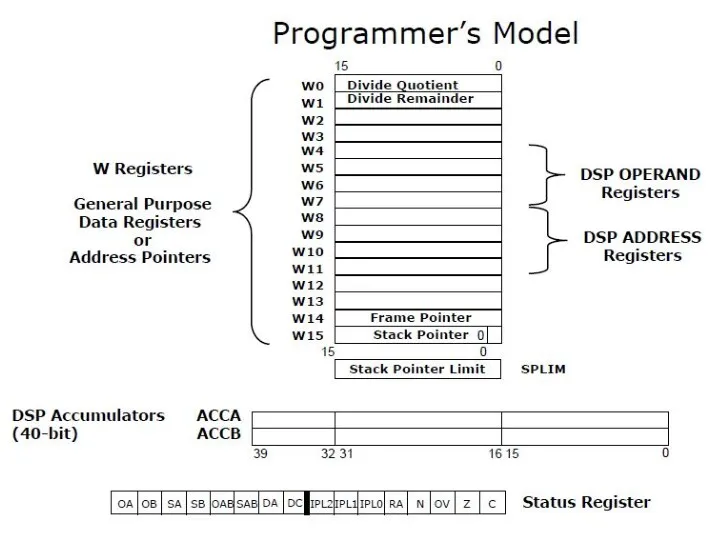
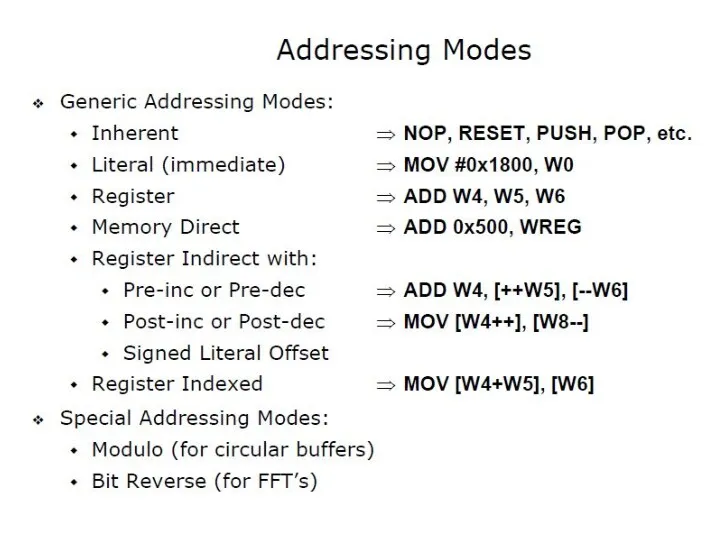

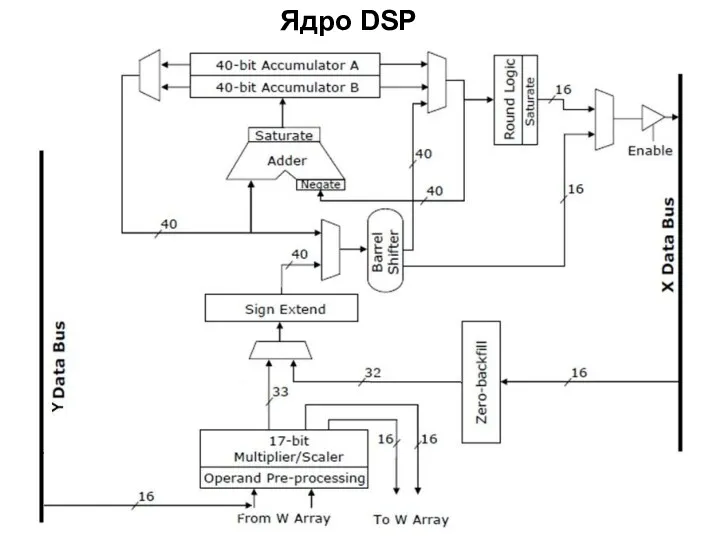
Ядро DSP
Ядро DSP

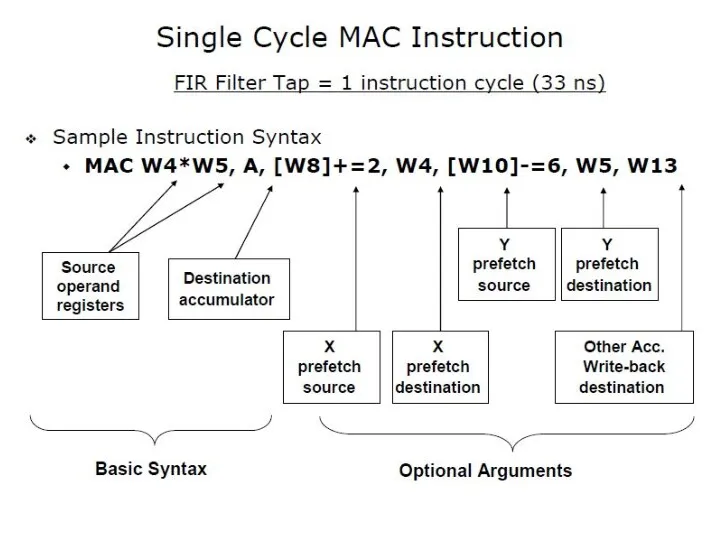
Инструкции ядра MAC
Инструкции ядра MAC
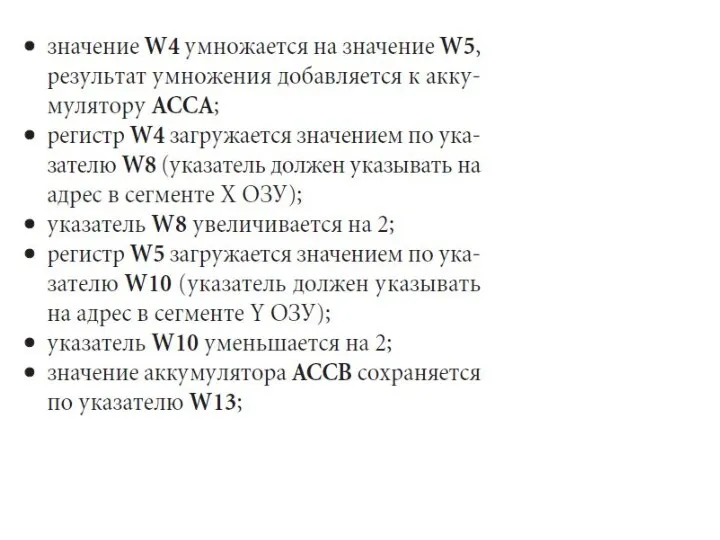
Циклический буфер (модульная адресация)
XMODSRT = (unsigned int) array1;
XMODEND = (unsigned int)
Циклический буфер (модульная адресация)
XMODSRT = (unsigned int) array1;
XMODEND = (unsigned int)
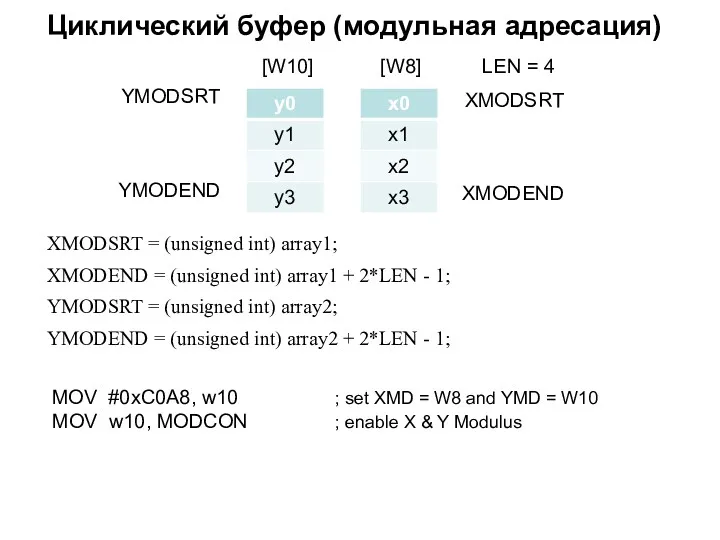
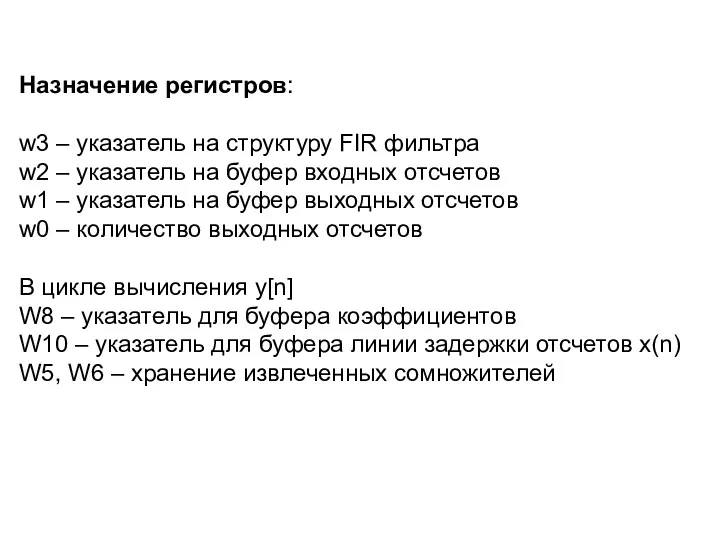
Назначение регистров:
w3 – (LEN-1)
w2 – указатель для массива значений функции R(n)
w1
Назначение регистров:
w3 – (LEN-1)
w2 – указатель для массива значений функции R(n)
w1
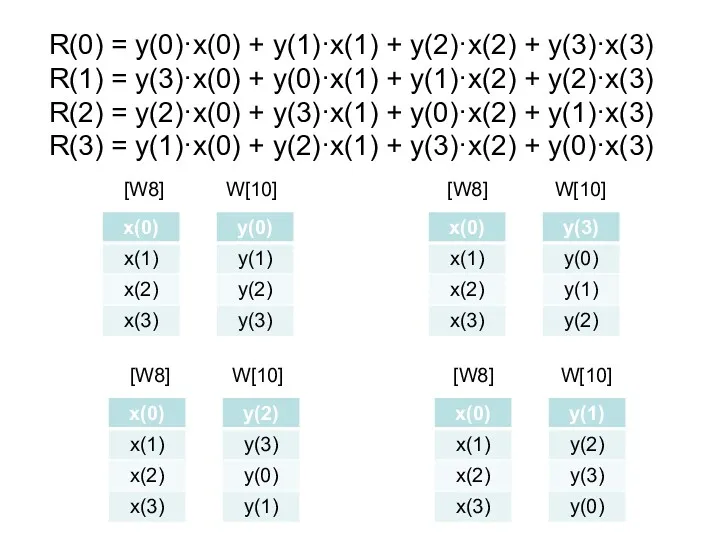
R(0) = y(0)·x(0) + y(1)·x(1) + y(2)·x(2) + y(3)·x(3)
R(1) =
R(0) = y(0)·x(0) + y(1)·x(1) + y(2)·x(2) + y(3)·x(3)
R(1) =
![Цикл вычисления R[n] DO w3, array_loop ; цикл обработки всех](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/170394/slide-34.jpg)
Цикл вычисления R[n]
DO w3, array_loop ; цикл обработки всех входных выборок
;
Цикл вычисления R[n]
DO w3, array_loop ; цикл обработки всех входных выборок
;
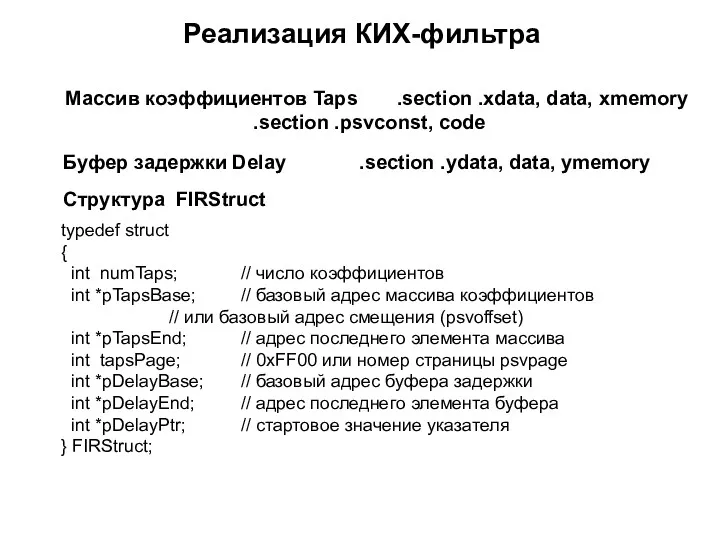
typedef struct
{
int numTaps; // число коэффициентов
int *pTapsBase; // базовый адрес массива
typedef struct
{
int numTaps; // число коэффициентов
int *pTapsBase; // базовый адрес массива
![Циклический буфер (модульная адресация) SetupPointers: MOV [w3+oTapsEnd],w8 MOV w8, XMODEND](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/170394/slide-36.jpg)
Циклический буфер (модульная адресация)
SetupPointers:
MOV [w3+oTapsEnd],w8
MOV w8, XMODEND ; XMODEND
Циклический буфер (модульная адресация)
SetupPointers:
MOV [w3+oTapsEnd],w8
MOV w8, XMODEND ; XMODEND
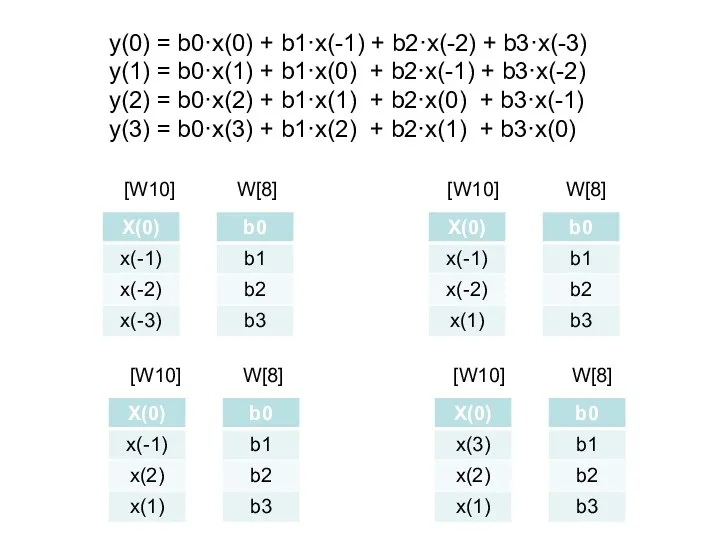
y(0) = b0·x(0) + b1·x(-1) + b2·x(-2) + b3·x(-3)
y(1) =
y(0) = b0·x(0) + b1·x(-1) + b2·x(-2) + b3·x(-3)
y(1) =
Назначение регистров:
w3 – указатель на структуру FIR фильтра
w2 – указатель на
Назначение регистров:
w3 – указатель на структуру FIR фильтра
w2 – указатель на
![Цикл вычисления y[n] DO w0, blockLoop ; цикл обработки всех](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/170394/slide-39.jpg)
Цикл вычисления y[n]
DO w0, blockLoop ; цикл обработки всех входных выборок
Цикл вычисления y[n]
DO w0, blockLoop ; цикл обработки всех входных выборок
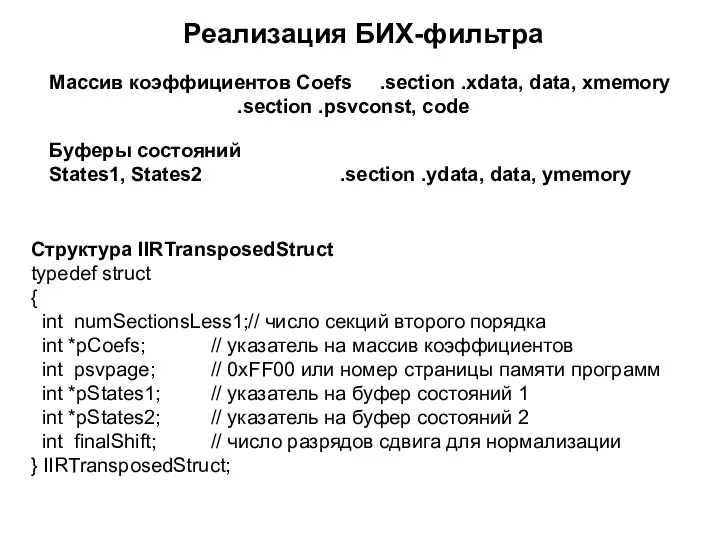
Реализация БИХ-фильтра
Массив коэффициентов Coefs .section .xdata, data, xmemory
.section .psvconst, code
Буферы
Реализация БИХ-фильтра
Массив коэффициентов Coefs .section .xdata, data, xmemory
.section .psvconst, code
Буферы
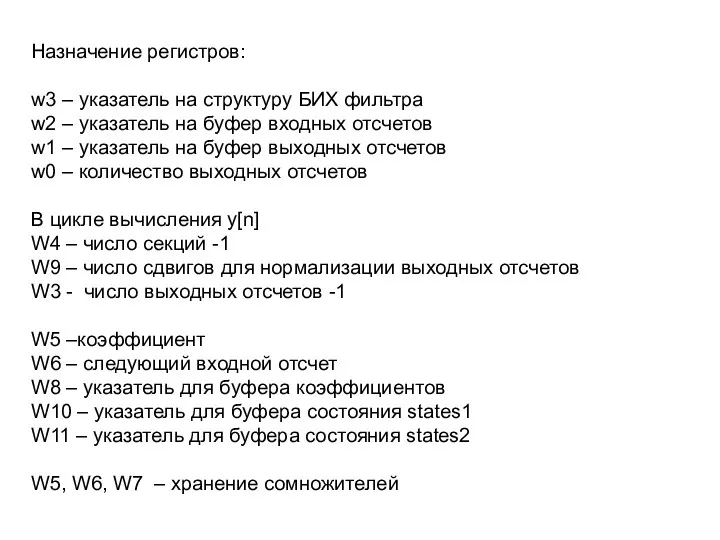
Назначение регистров:
w3 – указатель на структуру БИХ фильтра
w2 – указатель на
Назначение регистров:
w3 – указатель на структуру БИХ фильтра
w2 – указатель на
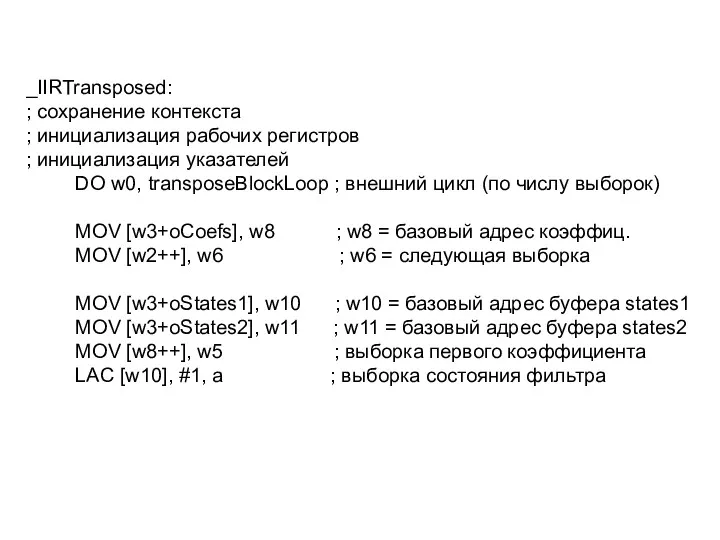
_IIRTransposed:
; сохранение контекста
; инициализация рабочих регистров
; инициализация указателей
DO w0, transposeBlockLoop
_IIRTransposed:
; сохранение контекста
; инициализация рабочих регистров
; инициализация указателей
DO w0, transposeBlockLoop
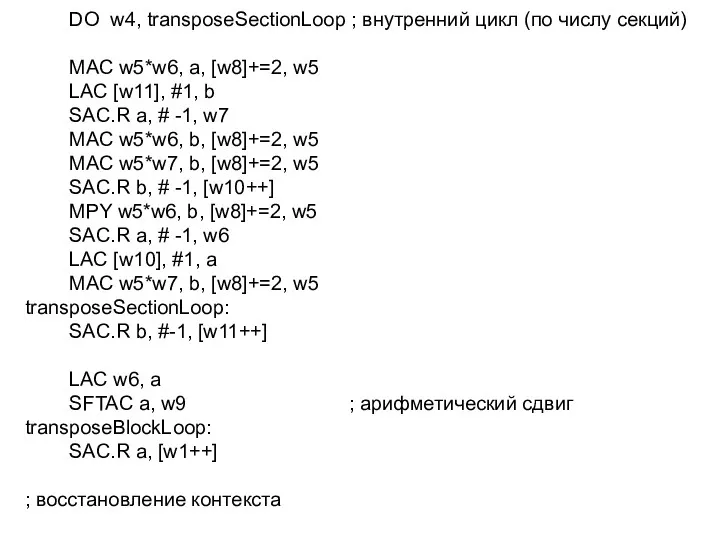
DO w4, transposeSectionLoop ; внутренний цикл (по числу секций)
MAC
DO w4, transposeSectionLoop ; внутренний цикл (по числу секций)
MAC
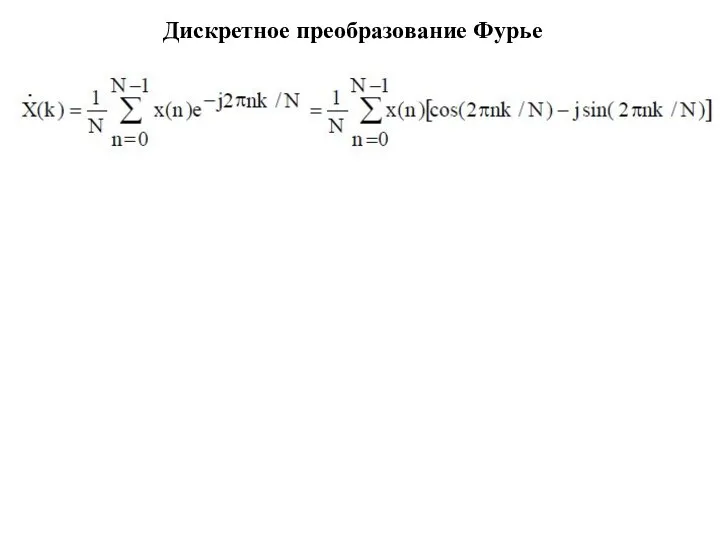
Дискретное преобразование Фурье
Дискретное преобразование Фурье
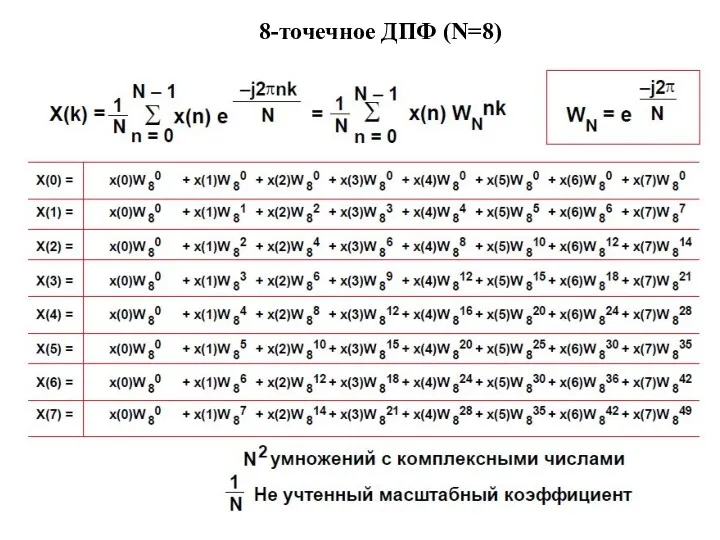
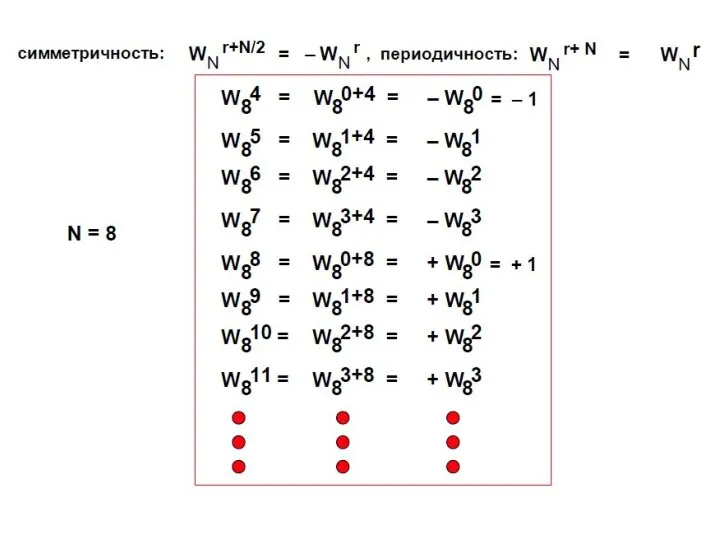
8-точечное ДПФ (N=8)
8-точечное ДПФ (N=8)
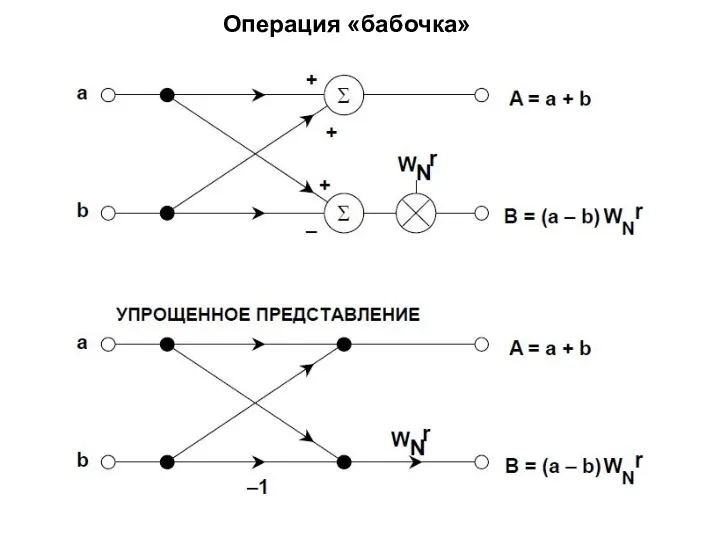
Операция «бабочка»
Операция «бабочка»
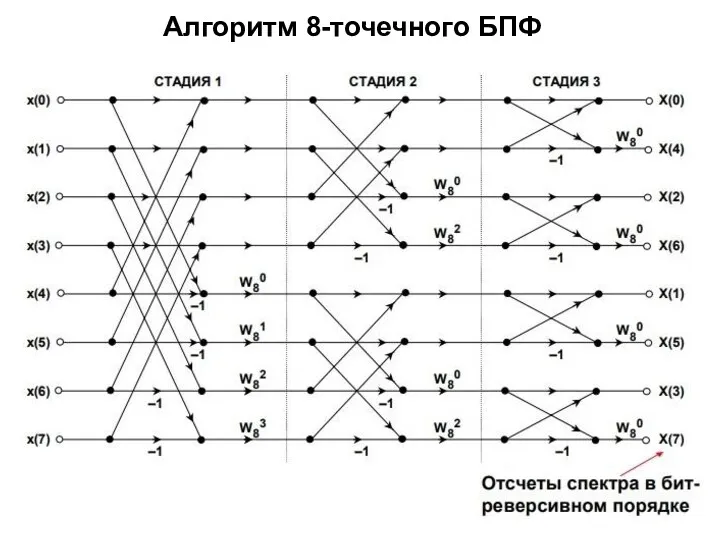
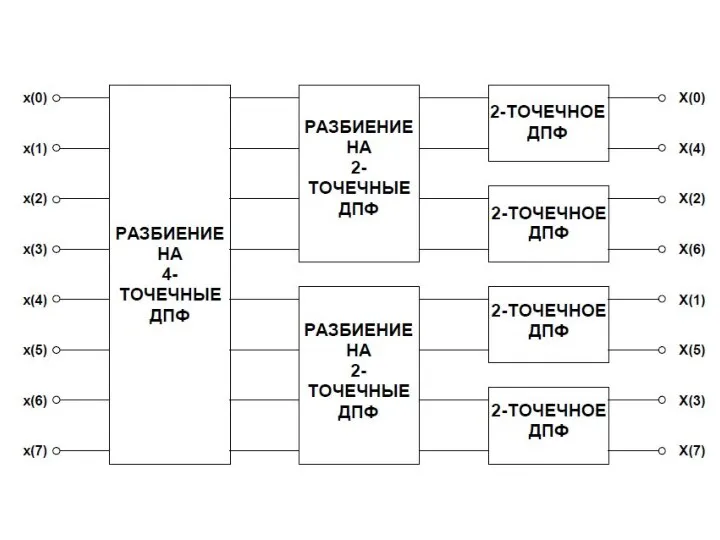
Алгоритм 8-точечного БПФ
Алгоритм 8-точечного БПФ

Упорядочивание элементов массива
(бит-реверсная адресация)
Упорядочивание элементов массива
(бит-реверсная адресация)
![int output[64]; // выходной массив фильтра int i; // переменная](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/170394/slide-51.jpg)
int output[64]; // выходной массив фильтра
int i; // переменная цикла
#define FFT_BLOCK_LENGTH 64 //
int output[64]; // выходной массив фильтра
int i; // переменная цикла
#define FFT_BLOCK_LENGTH 64 //
![Функции программы (API) IIRTransposedInit(&Filter); //инициализация структуры фильтра TwidFactorInit (LOG2_BLOCK_LENGTH, &twiddleFactors[0],](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/170394/slide-52.jpg)
Функции программы (API)
IIRTransposedInit(&Filter); //инициализация структуры фильтра
TwidFactorInit (LOG2_BLOCK_LENGTH, &twiddleFactors[0], 0);
//инициализация
Функции программы (API)
IIRTransposedInit(&Filter); //инициализация структуры фильтра
TwidFactorInit (LOG2_BLOCK_LENGTH, &twiddleFactors[0], 0);
//инициализация
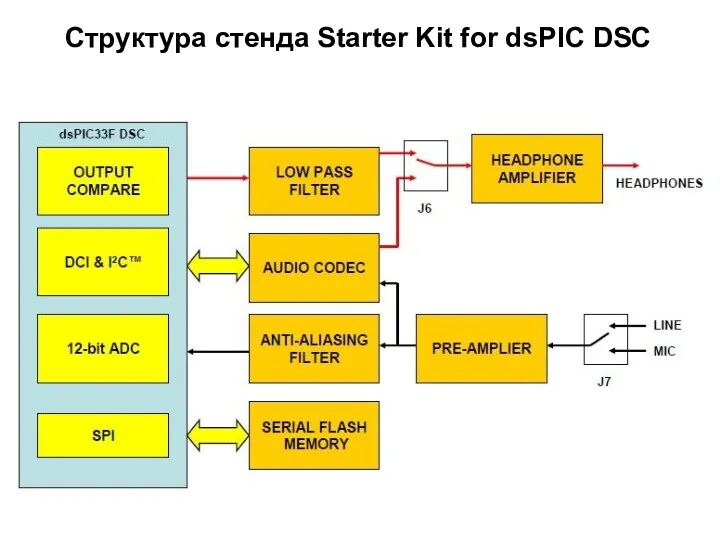
Структура стенда Starter Kit for dsPIC DSC
Структура стенда Starter Kit for dsPIC DSC
Периферийные модули dsPIC
Периферийные модули dsPIC
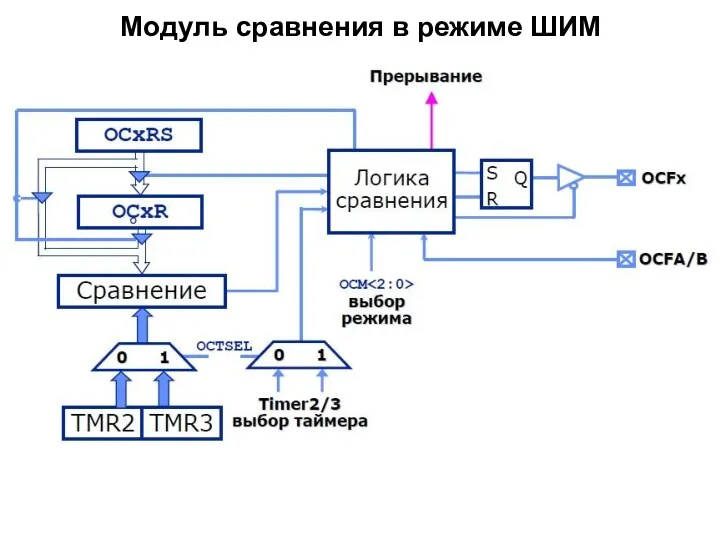
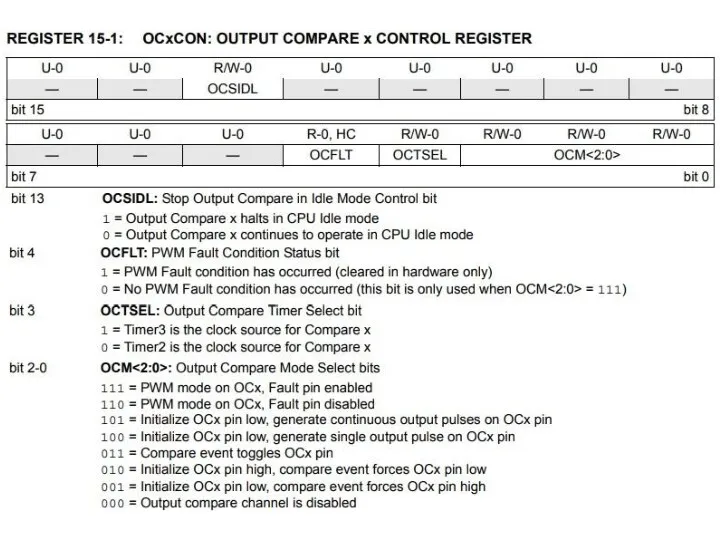
Модуль сравнения в режиме ШИМ
Модуль сравнения в режиме ШИМ
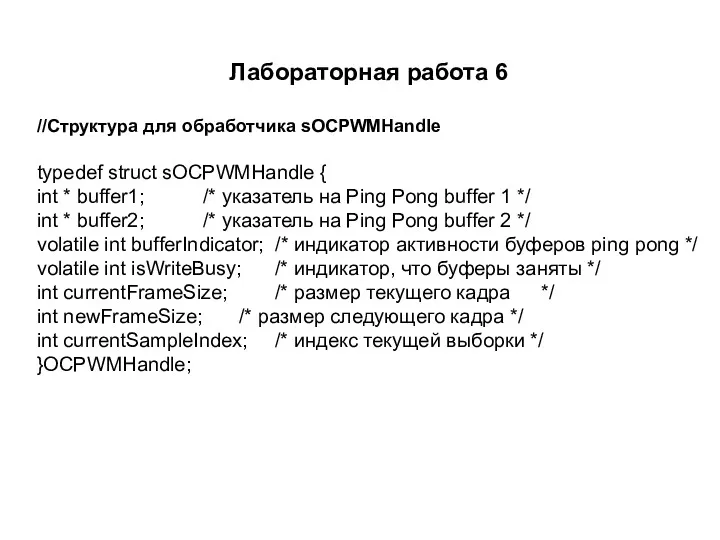
Лабораторная работа 6
//Структура для обработчика sOCPWMHandle
typedef struct sOCPWMHandle {
int * buffer1;
Лабораторная работа 6
//Структура для обработчика sOCPWMHandle
typedef struct sOCPWMHandle {
int * buffer1;
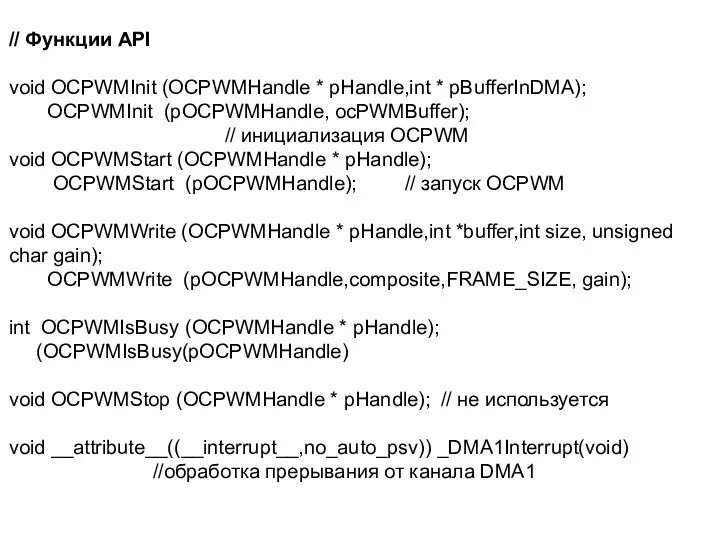
// Функции API
void OCPWMInit (OCPWMHandle * pHandle,int * pBufferInDMA);
OCPWMInit (pOCPWMHandle,
// Функции API
void OCPWMInit (OCPWMHandle * pHandle,int * pBufferInDMA);
OCPWMInit (pOCPWMHandle,
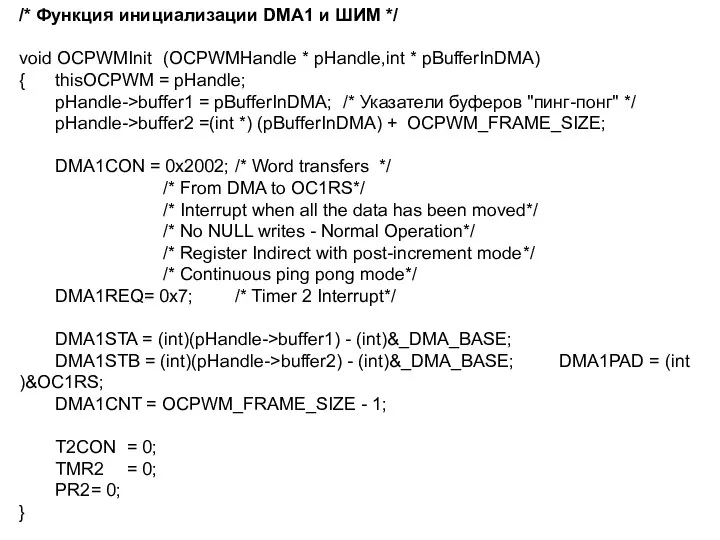
/* Функция инициализации DMA1 и ШИМ */
void OCPWMInit (OCPWMHandle * pHandle,int *
/* Функция инициализации DMA1 и ШИМ */
void OCPWMInit (OCPWMHandle * pHandle,int *
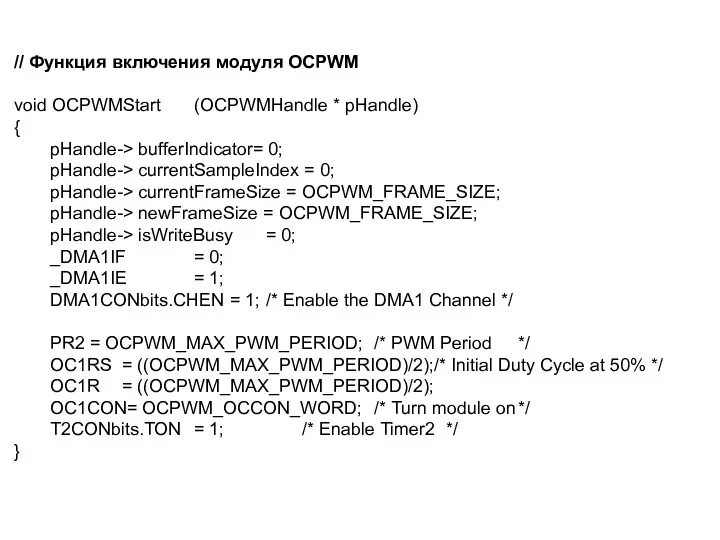
// Функция включения модуля OCPWM
void OCPWMStart (OCPWMHandle * pHandle)
{
pHandle-> bufferIndicator= 0;
pHandle-> currentSampleIndex
// Функция включения модуля OCPWM
void OCPWMStart (OCPWMHandle * pHandle)
{
pHandle-> bufferIndicator= 0;
pHandle-> currentSampleIndex
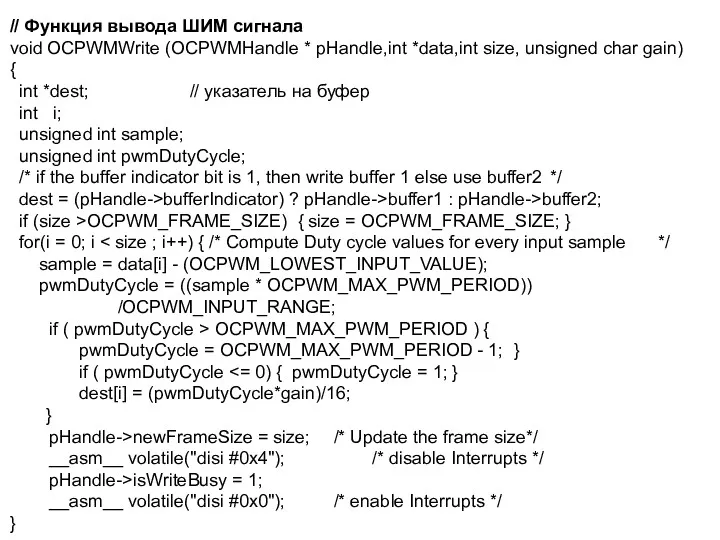
// Функция вывода ШИМ сигнала
void OCPWMWrite (OCPWMHandle * pHandle,int *data,int size,
// Функция вывода ШИМ сигнала
void OCPWMWrite (OCPWMHandle * pHandle,int *data,int size,
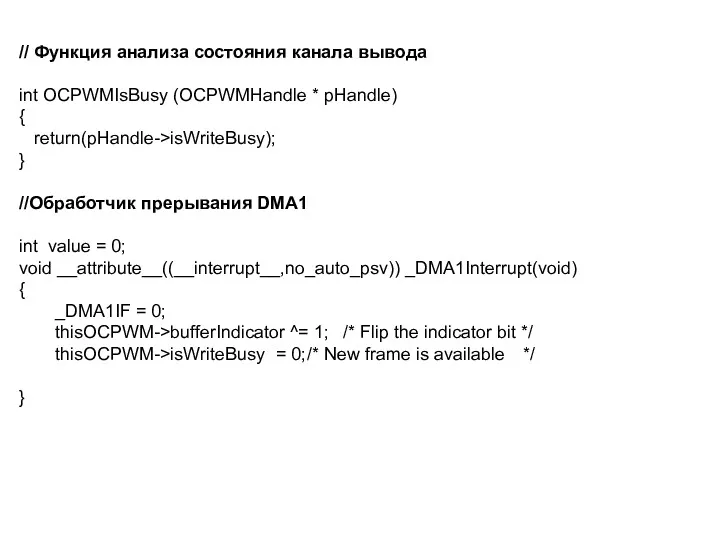
// Функция анализа состояния канала вывода
int OCPWMIsBusy (OCPWMHandle * pHandle)
{
return(pHandle->isWriteBusy);
}
//Обработчик
// Функция анализа состояния канала вывода
int OCPWMIsBusy (OCPWMHandle * pHandle)
{
return(pHandle->isWriteBusy);
}
//Обработчик
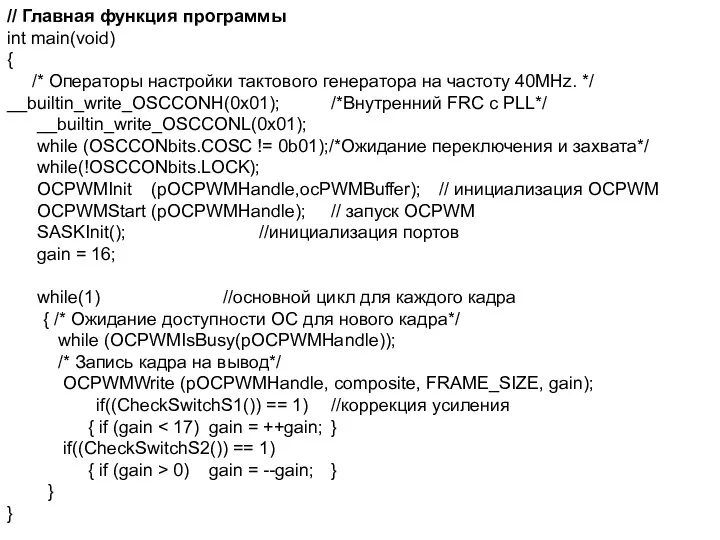
// Главная функция программы
int main(void)
{
/* Операторы настройки тактового генератора на
// Главная функция программы
int main(void)
{
/* Операторы настройки тактового генератора на
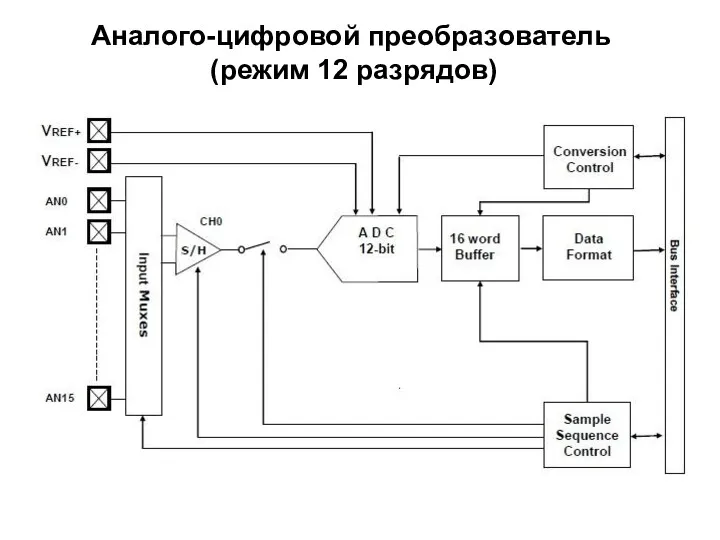
Аналого-цифровой преобразователь
(режим 12 разрядов)
Аналого-цифровой преобразователь
(режим 12 разрядов)
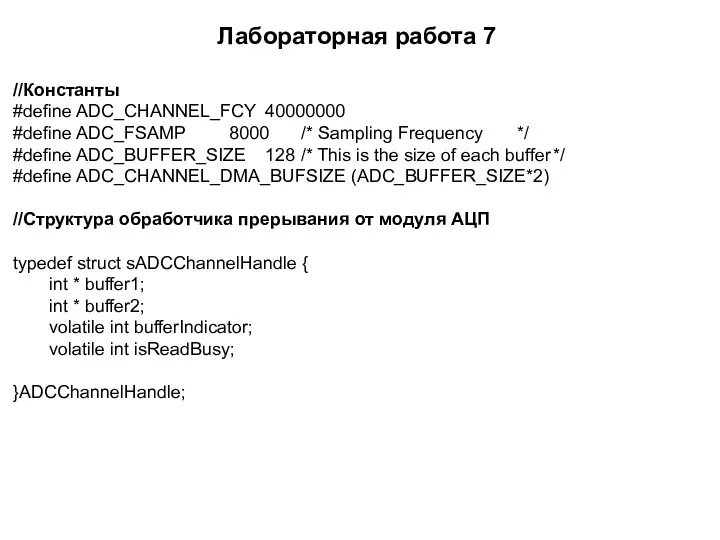
Лабораторная работа 7
//Константы
#define ADC_CHANNEL_FCY 40000000
#define ADC_FSAMP 8000 /* Sampling Frequency */
#define ADC_BUFFER_SIZE 128 /* This is the
Лабораторная работа 7
//Константы
#define ADC_CHANNEL_FCY 40000000
#define ADC_FSAMP 8000 /* Sampling Frequency */
#define ADC_BUFFER_SIZE 128 /* This is the
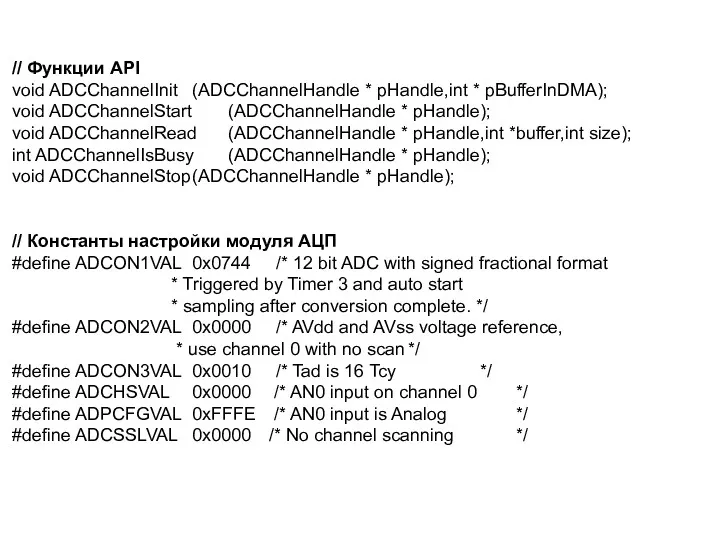
// Функции API
void ADCChannelInit (ADCChannelHandle * pHandle,int * pBufferInDMA);
void ADCChannelStart (ADCChannelHandle * pHandle);
void
// Функции API
void ADCChannelInit (ADCChannelHandle * pHandle,int * pBufferInDMA);
void ADCChannelStart (ADCChannelHandle * pHandle);
void
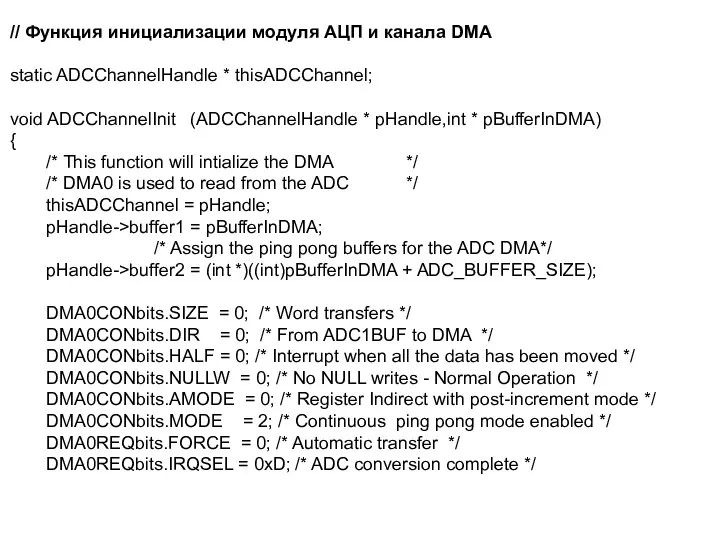
// Функция инициализации модуля АЦП и канала DMA
static ADCChannelHandle * thisADCChannel;
void
// Функция инициализации модуля АЦП и канала DMA
static ADCChannelHandle * thisADCChannel;
void
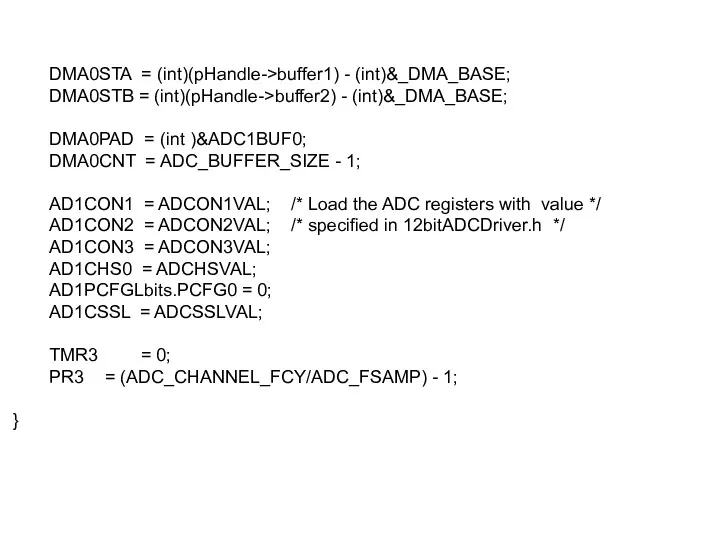
DMA0STA = (int)(pHandle->buffer1) - (int)&_DMA_BASE;
DMA0STB = (int)(pHandle->buffer2) - (int)&_DMA_BASE;
DMA0PAD = (int
DMA0STA = (int)(pHandle->buffer1) - (int)&_DMA_BASE;
DMA0STB = (int)(pHandle->buffer2) - (int)&_DMA_BASE;
DMA0PAD = (int
// Функция включения модуля АЦП
void ADCChannelStart (ADCChannelHandle * pHandle)
{
pHandle->bufferIndicator = 0;
pHandle->isReadBusy =
// Функция включения модуля АЦП
void ADCChannelStart (ADCChannelHandle * pHandle)
{
pHandle->bufferIndicator = 0;
pHandle->isReadBusy =
// Функция аналогового ввода
void ADCChannelRead (ADCChannelHandle * pHandle,int *data,int size)
{
int *source;
int i;
/*
// Функция аналогового ввода
void ADCChannelRead (ADCChannelHandle * pHandle,int *data,int size)
{
int *source;
int i;
/*
// Функция анализа состояния канала ввода
int ADCChannelIsBusy (ADCChannelHandle * pHandle)
{
return(pHandle->isReadBusy);
}
// Функция обработчика
// Функция анализа состояния канала ввода
int ADCChannelIsBusy (ADCChannelHandle * pHandle)
{
return(pHandle->isReadBusy);
}
// Функция обработчика
// Основной модуль программы
_FGS(GWRP_OFF & GCP_OFF);
_FOSCSEL(FNOSC_FRC);
_FOSC(FCKSM_CSECMD & OSCIOFNC_ON & POSCMD_NONE);
_FWDT(FWDTEN_OFF);
#define FRAME_SIZE
// Основной модуль программы
_FGS(GWRP_OFF & GCP_OFF);
_FOSCSEL(FNOSC_FRC);
_FOSC(FCKSM_CSECMD & OSCIOFNC_ON & POSCMD_NONE);
_FWDT(FWDTEN_OFF);
#define FRAME_SIZE
// Главная функция программы
int main(void)
{
/* Настройка тактового генератора на частоту 40MHz.
// Главная функция программы
int main(void)
{
/* Настройка тактового генератора на частоту 40MHz.
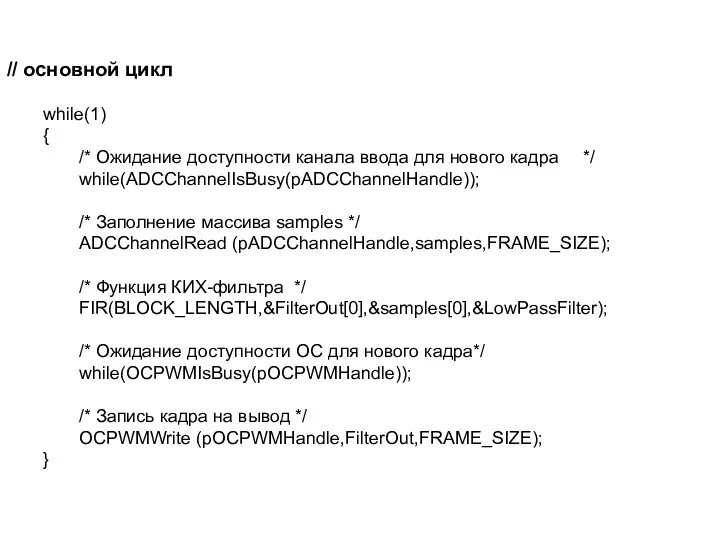
// основной цикл
while(1)
{
/* Ожидание доступности канала ввода для нового кадра */
while(ADCChannelIsBusy(pADCChannelHandle));
/* Заполнение
// основной цикл
while(1)
{
/* Ожидание доступности канала ввода для нового кадра */
while(ADCChannelIsBusy(pADCChannelHandle));
/* Заполнение
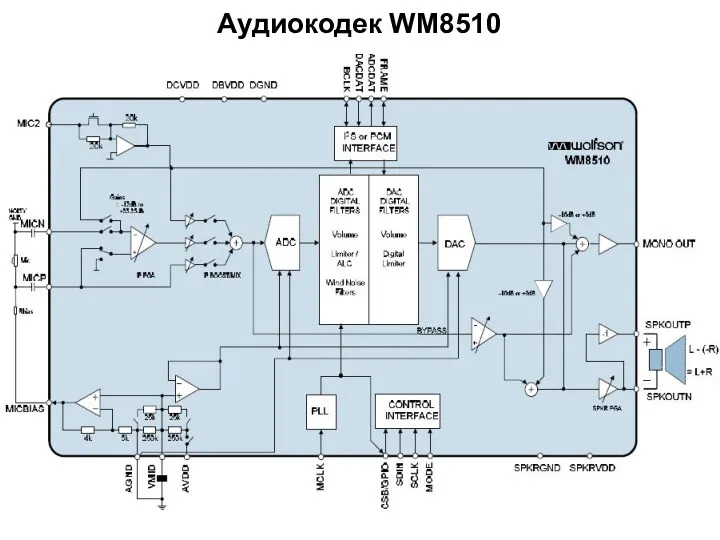
Аудиокодек WM8510
Аудиокодек WM8510
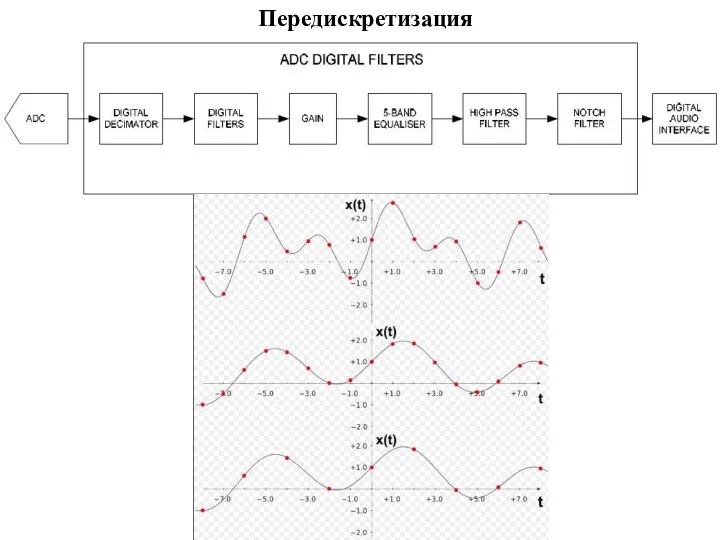
Передискретизация
Передискретизация
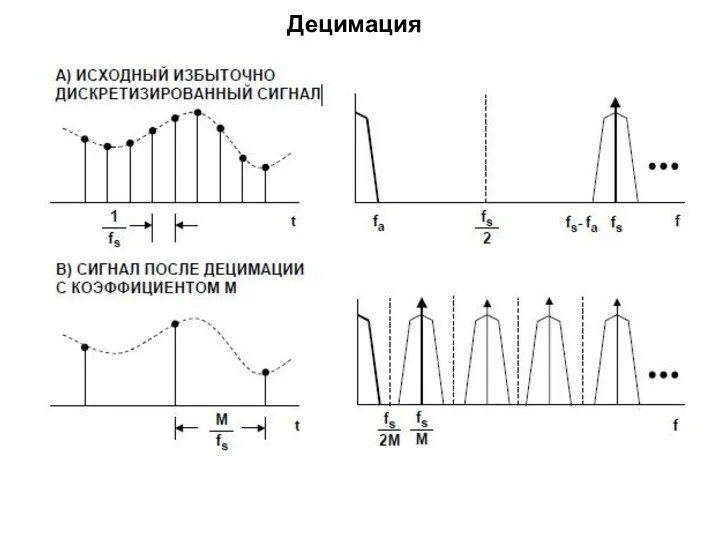
Децимация
Децимация
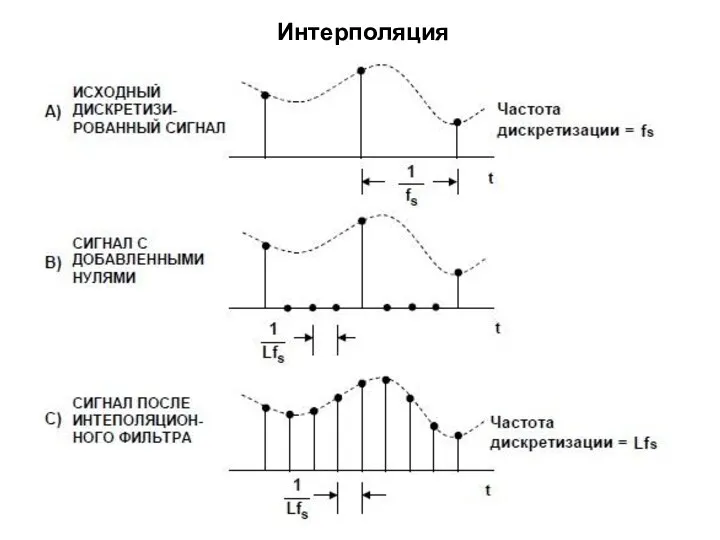
Интерполяция
Интерполяция
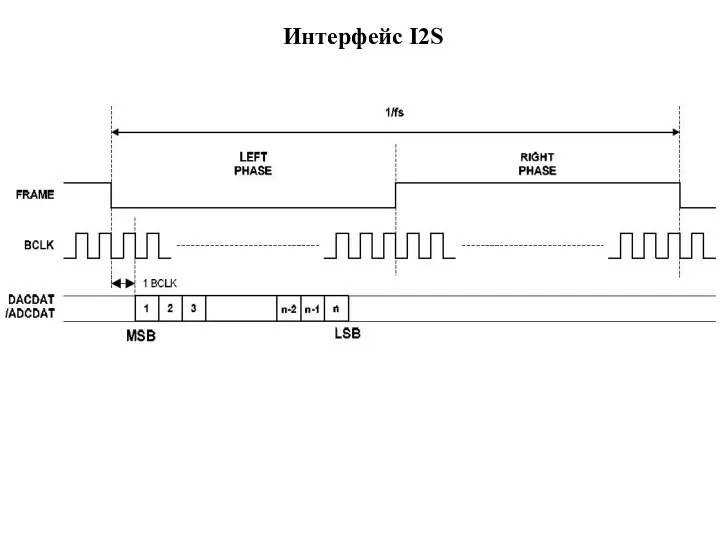
Интерфейс I2S
Интерфейс I2S
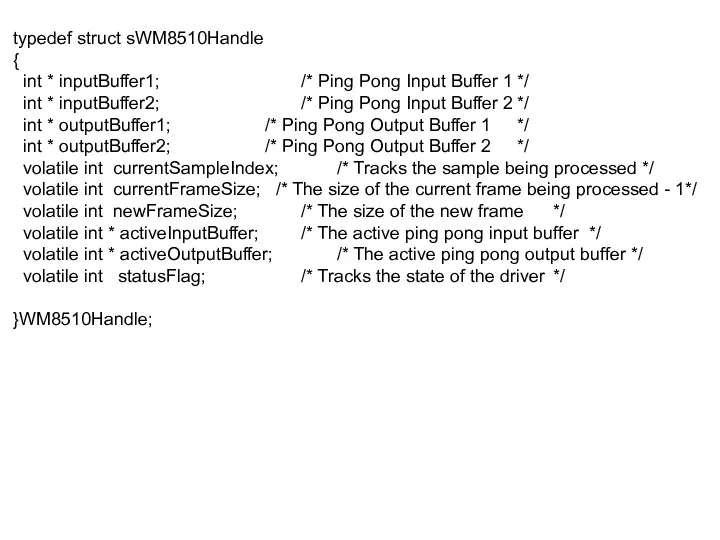
typedef struct sWM8510Handle
{
int * inputBuffer1; /* Ping Pong Input Buffer 1 */
typedef struct sWM8510Handle
{
int * inputBuffer1; /* Ping Pong Input Buffer 1 */
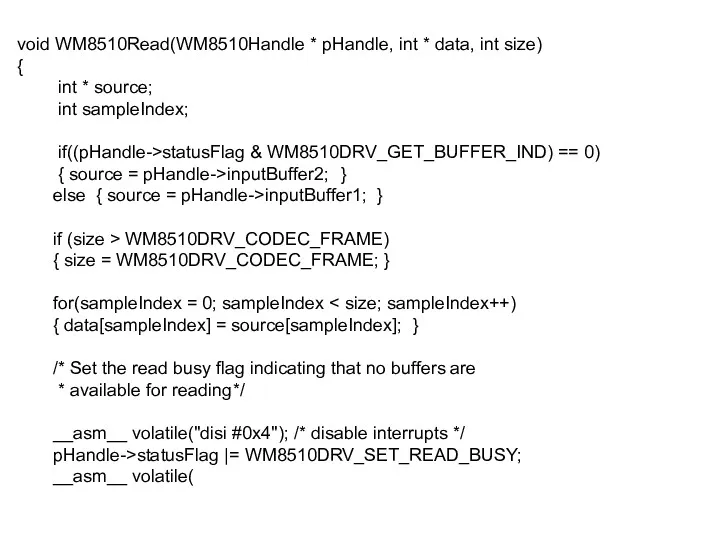
void WM8510Read(WM8510Handle * pHandle, int * data, int size)
{
int *
void WM8510Read(WM8510Handle * pHandle, int * data, int size)
{
int *
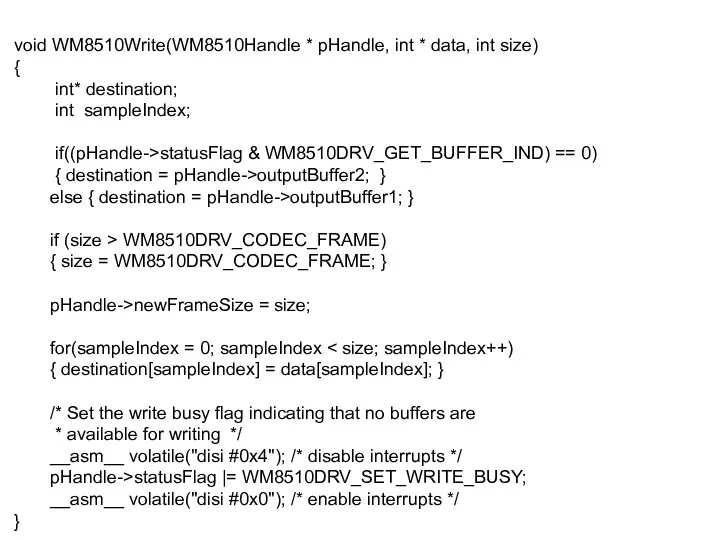
void WM8510Write(WM8510Handle * pHandle, int * data, int size)
{
int* destination;
void WM8510Write(WM8510Handle * pHandle, int * data, int size)
{
int* destination;
 Використання інформаційних технологій в управлінні підприємством
Використання інформаційних технологій в управлінні підприємством Использование информационно-коммуникационных технологий на уроках технологии
Использование информационно-коммуникационных технологий на уроках технологии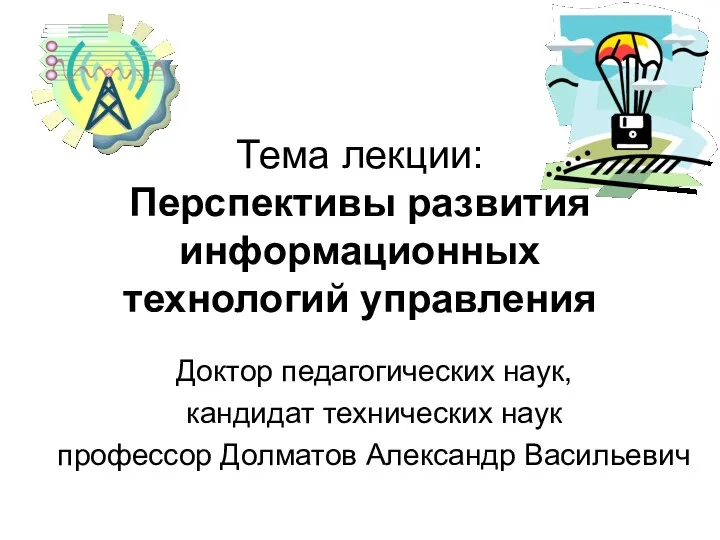 Перспективы развития информационных технологий управления
Перспективы развития информационных технологий управления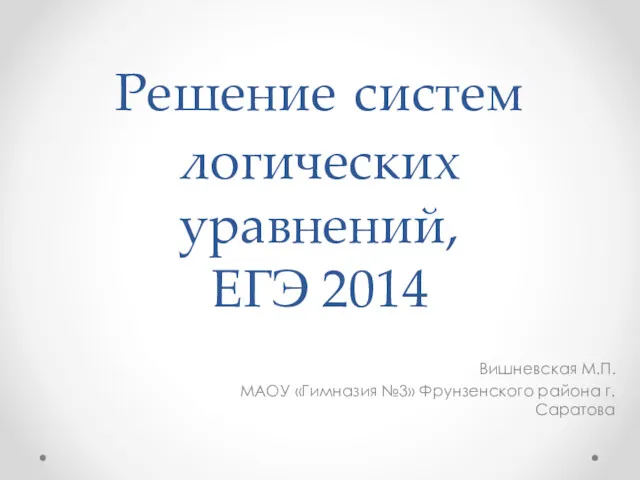 Решение систем логических уравнений, ЕГЭ 2014
Решение систем логических уравнений, ЕГЭ 2014 Виды IP адресов
Виды IP адресов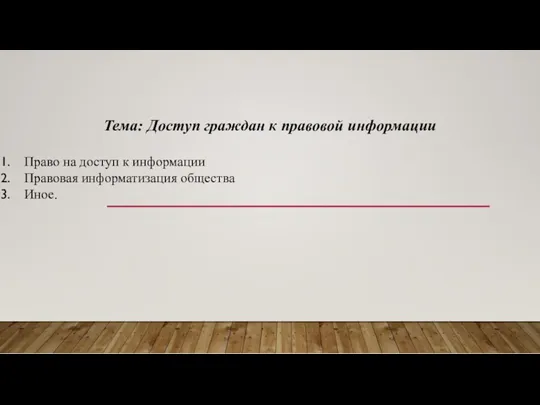 Доступ граждан к правовой информации
Доступ граждан к правовой информации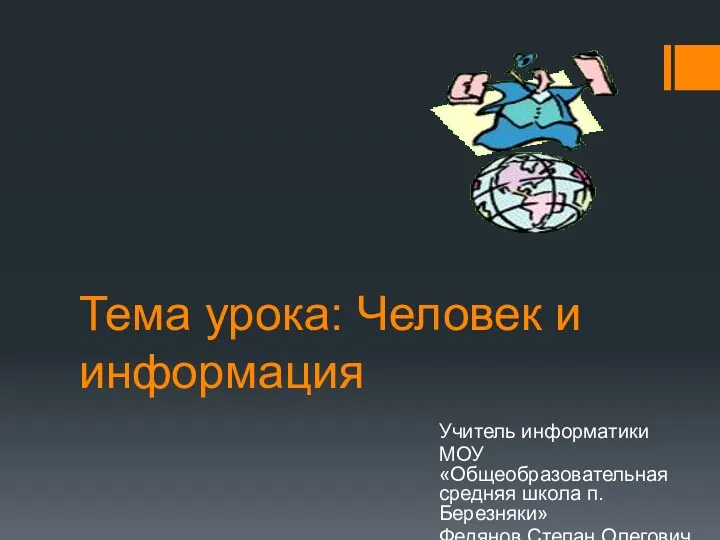 1 урок Информатики 3 класс Человек и информация
1 урок Информатики 3 класс Человек и информация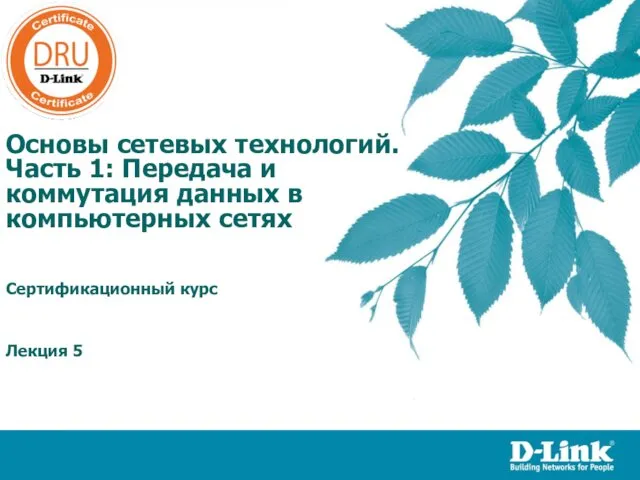 Основы сетевых технологий. Канальный уровень модели OSI. Часть 1. Лекция 5
Основы сетевых технологий. Канальный уровень модели OSI. Часть 1. Лекция 5 Обучение нормативн-справочной информации
Обучение нормативн-справочной информации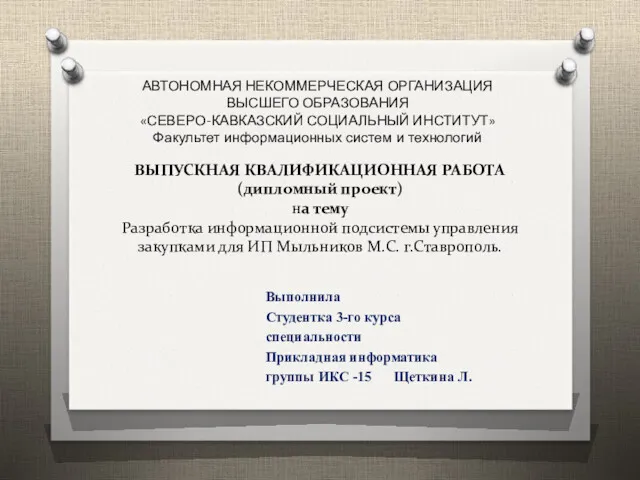 Разработка информационной подсистемы управления закупками для ИП Мыльников М.С. г. Ставрополь
Разработка информационной подсистемы управления закупками для ИП Мыльников М.С. г. Ставрополь Эксплуатация подсистем безопасности АС. Криптографическое преобразование информации в АС. (Тема 7)
Эксплуатация подсистем безопасности АС. Криптографическое преобразование информации в АС. (Тема 7)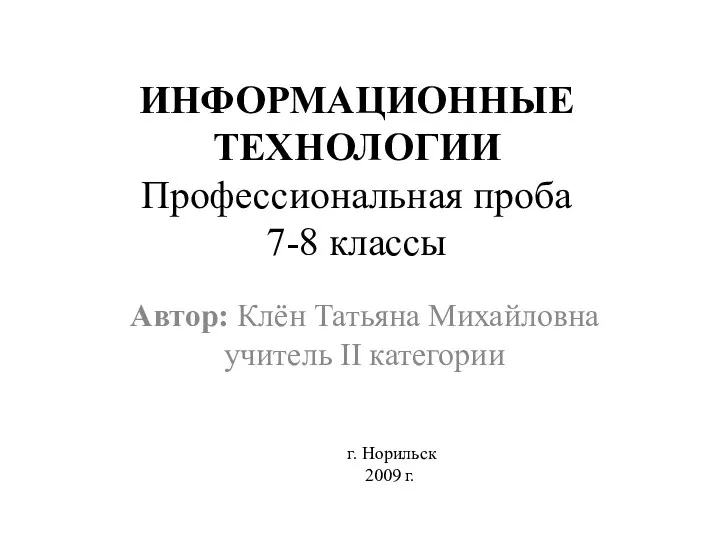 Программа профессиональной пробы Информационные технологии
Программа профессиональной пробы Информационные технологии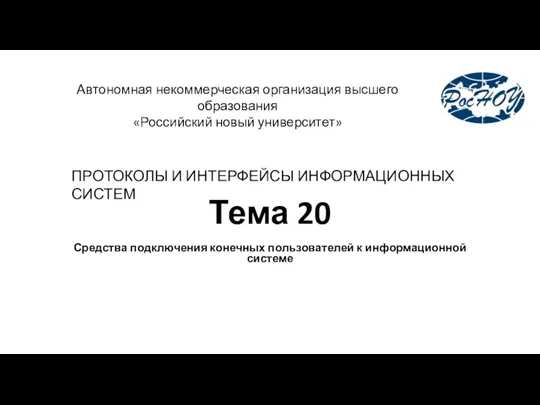 Средства подключения конечных пользователей к информационной системе. Тема 20
Средства подключения конечных пользователей к информационной системе. Тема 20 Изучаем графический редактор Paint
Изучаем графический редактор Paint Основні можливості роботи в Power Point
Основні можливості роботи в Power Point Библиотека в социальных сетях
Библиотека в социальных сетях Современные инновационные технологии. Плюсы и минусы
Современные инновационные технологии. Плюсы и минусы Использование возможностей программы Microsoft Word
Использование возможностей программы Microsoft Word Стратегический анализ
Стратегический анализ JavaScript. Lesson 4
JavaScript. Lesson 4 Програмування пристрою для контролю температури на базі мікроконтролера RISC-архітектури
Програмування пристрою для контролю температури на базі мікроконтролера RISC-архітектури Интерактивные тесты Повторение школьного курса информатики. 11 класс
Интерактивные тесты Повторение школьного курса информатики. 11 класс Построение диаграммы типа график в электронной таблице по значению функций
Построение диаграммы типа график в электронной таблице по значению функций Методы сортировки
Методы сортировки Инструкция ZOOM. Техническое оснащение вебинара
Инструкция ZOOM. Техническое оснащение вебинара Коллекции Python
Коллекции Python Bitbucket repository. EPAM Java Training
Bitbucket repository. EPAM Java Training Windows 2003/2008 Server. Администрирование
Windows 2003/2008 Server. Администрирование