- Элементы теории графов. Тема 2

Содержание
- 2. Введение Первая работа по графам была опубликована математиком Эйлером в 1736 году. Она содержала решение задачи
- 3. Начало развития теории графов как самостоятельной математической дисциплины положено Д. Кенигом, выпустившим в 1936 году книгу
- 4. Теория графов имеет большое прикладное значение. Проблемы оптимизации тепловых, газовых и электрических сетей, вопросы совершенствования алгоритмов,
- 5. В настоящее время круг задач, решаемых с помощью аппарата теории графов, очень разнообразен: анализ и синтез
- 6. Основные понятия и определения. Способы задания графов Ориентированный граф G представляет собой множество элементов с их
- 7. При аналитическом способе задания для каждого элемента хi множества X должно быть определено отображение Эти множества
- 8. При геометрическом способe задания графа элементы множества X изображаются точками плоскости и называются вершинами графа. Линии,
- 9. Если , то дуга изображается линией без стрелки и называется петлей. Каждую дугу (xi , xj)
- 10. Две вершины графа называются смежными, если существует инцидентное им ребро. Два ребра называются смежными, если они
- 11. При матричном способе задания ориентированный граф можно описать матрицей смежности или матрицей инцидентности. Матрица смежности RG
- 12. Матрица инцидентности AG ориентированного графа G(X, Г) – это прямоугольная матрица размером n×m (n – число
- 13. Иногда граф рассматривают без учета ориентации его дуг, в этом случае граф называют неориентированным. D Такой
- 14. Матрица смежности RD неориентированного графа D (X, Г) с n вершинами – это квадратная матрица порядка
- 15. Матрица инцидентности AD неориентированного графа D(X, V) – это прямоугольная матрица размером n×m (n – число
- 16. Рёбра, которые начинаются в одной и той же вершине, заканчиваются также в одной и той же
- 17. Число рёбер, инцидентных вершине А, называется степенью этой вершины и обозначается deg(A) (от англ. degree –
- 18. Вершина графа, имеющая степень, равную нулю, называется изолированной. Граф, состоящий из изолированных вершин, называется нуль-графом. Вершина
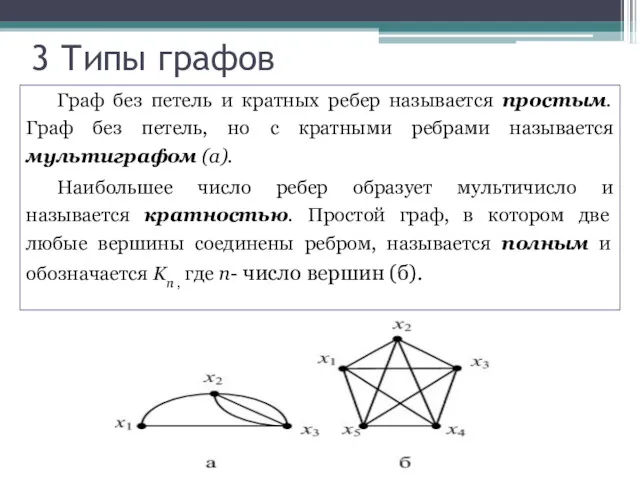
- 19. 3 Типы графов Граф без петель и кратных ребер называется простым. Граф без петель, но с
- 20. Граф называется двудольном (биграфом), если множество его вершин X может быть разбито на два таких подмножества
- 21. Подграфом графа D (или G) называется граф, в которой входит лишь часть вершин графа D (или
- 22. Граф называется связным, если каждую его вершину можно соединить с любой другой его вершиной некоторой последовательностью
- 23. Графы называются изоморфными, если между множествами их вершин существует взаимооднозначное соответствие, такое, что вершины соединены ребрами
- 24. 4 Расстояния и пути в графах. Центры и периферийные вершины Путь в ориентированном графе G –
- 25. Контур – это конечный путь μ = (х1, х2,..., хk), у которого начальная вершина х1 совпадает
- 26. Отклонением d(xi, xj) вершины xi от вершины xj называется длина кратчайшего пути из xi в xj
- 27. – матрица отклонений имеет вид
- 28. – вектор отклонения х3 – центр графа. Радиус ρ(G) = 1. Периферийными вершинами являются вершины х1,
- 29. В неориентированных графах перемещаться можно в любом направлении, здесь вместо понятий «путь», «отклонение» и «отклоненность» используются
- 30. 5 Операции над графами Теоретико-множественные свойства графов определяют операции объединения, пересечения, дополнения до насыщенного графа и
- 31. Граф G = (Х, Г) называется пересечением графов G1 и G2 и обозначается если и Насыщенным
- 32. Пример: Даны два подграфа G1 и G2. Найти объединение, пересечение и разность подграфов. G1 : X1
- 33. Пересечение Разность - дополнение по отображению графа G2 до насыщенного
- 35. Скачать презентацию
Введение
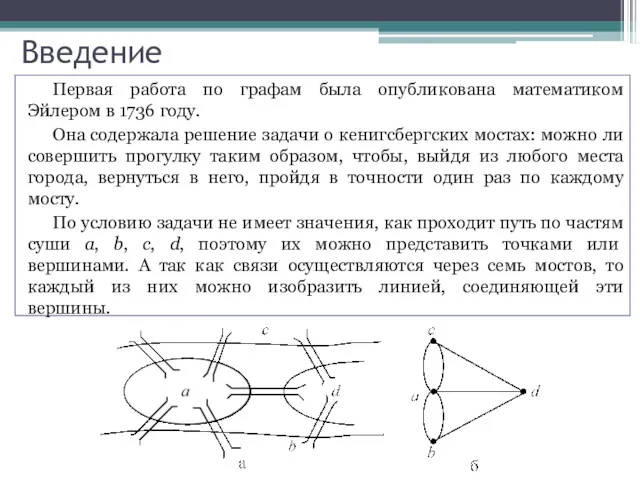
Первая работа по графам была опубликована математиком Эйлером в 1736 году.
Введение
Первая работа по графам была опубликована математиком Эйлером в 1736 году.
Начало развития теории графов как самостоятельной математической дисциплины положено Д. Кенигом, выпустившим
Начало развития теории графов как самостоятельной математической дисциплины положено Д. Кенигом, выпустившим
Теория графов имеет большое прикладное значение.
Проблемы оптимизации тепловых, газовых и
Теория графов имеет большое прикладное значение.
Проблемы оптимизации тепловых, газовых и
В настоящее время круг задач, решаемых с помощью аппарата теории графов,
В настоящее время круг задач, решаемых с помощью аппарата теории графов,
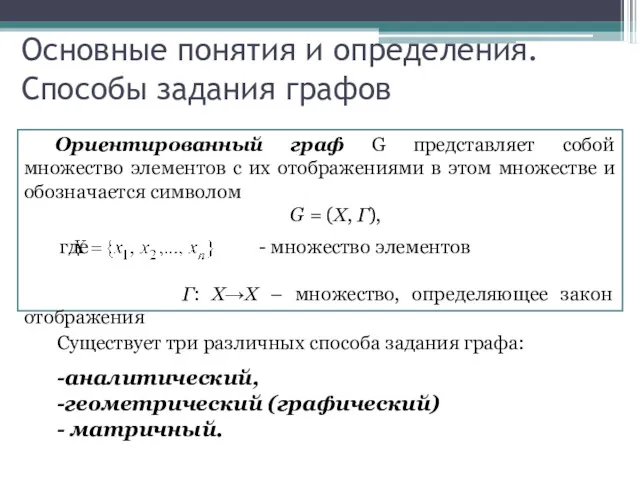
Основные понятия и определения. Способы задания графов
Ориентированный граф G представляет собой
Основные понятия и определения. Способы задания графов
Ориентированный граф G представляет собой
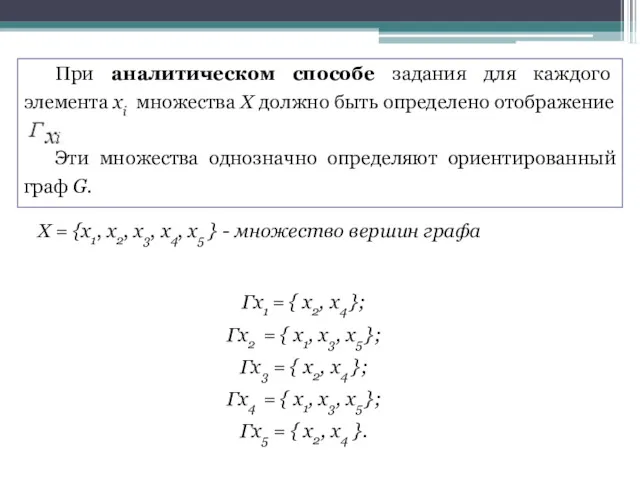
При аналитическом способе задания для каждого элемента хi множества X должно
При аналитическом способе задания для каждого элемента хi множества X должно
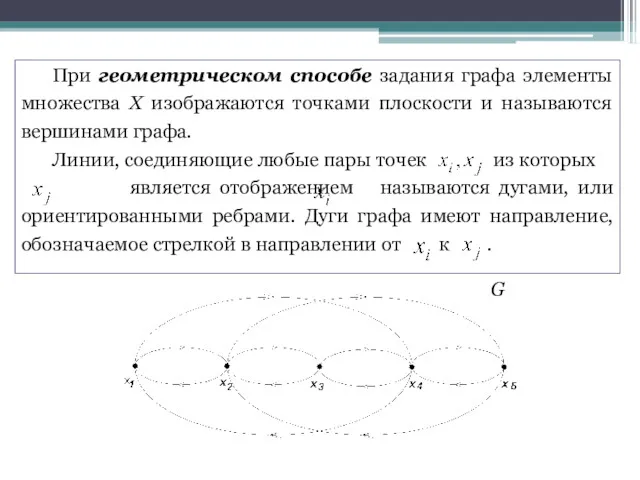
При геометрическом способe задания графа элементы множества X изображаются точками плоскости
При геометрическом способe задания графа элементы множества X изображаются точками плоскости
Если , то дуга изображается линией без стрелки и называется петлей.
Каждую
Если , то дуга изображается линией без стрелки и называется петлей.
Каждую
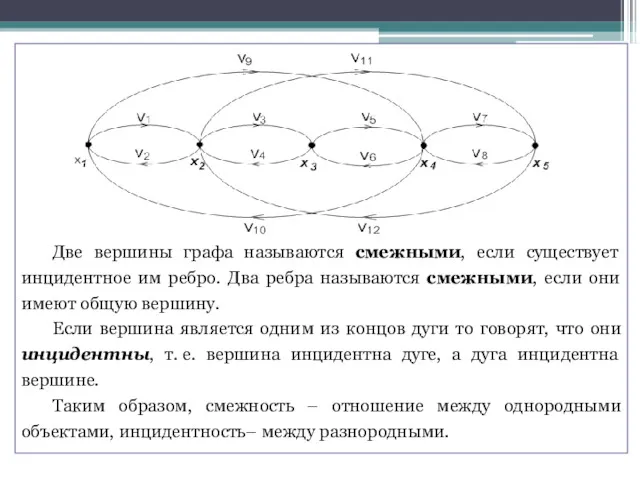
Две вершины графа называются смежными, если существует инцидентное им ребро. Два
Две вершины графа называются смежными, если существует инцидентное им ребро. Два
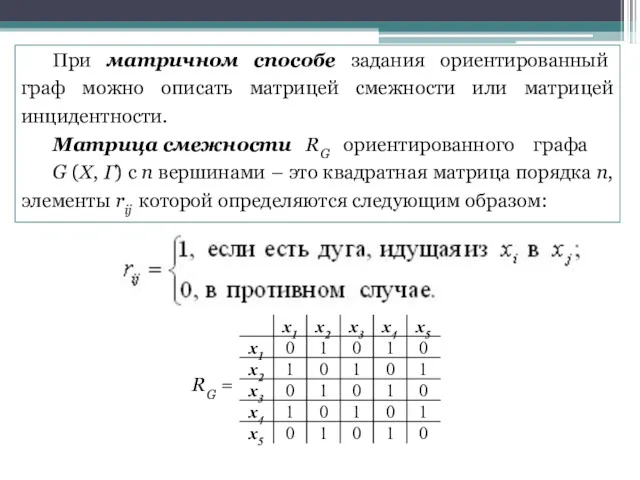
При матричном способе задания ориентированный граф можно описать матрицей смежности или
При матричном способе задания ориентированный граф можно описать матрицей смежности или
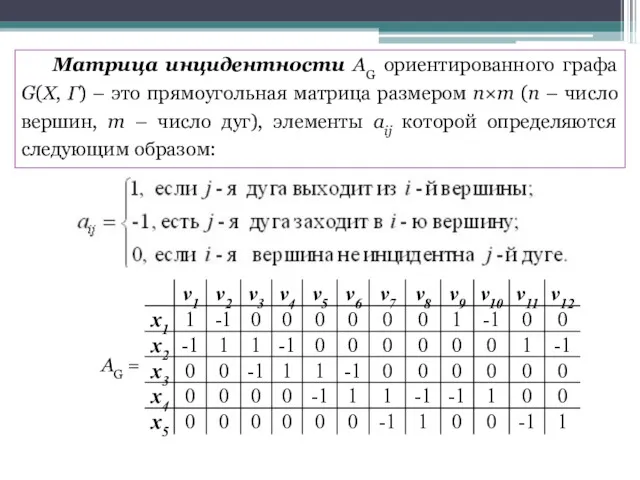
Матрица инцидентности AG ориентированного графа G(X, Г) – это прямоугольная матрица
Матрица инцидентности AG ориентированного графа G(X, Г) – это прямоугольная матрица
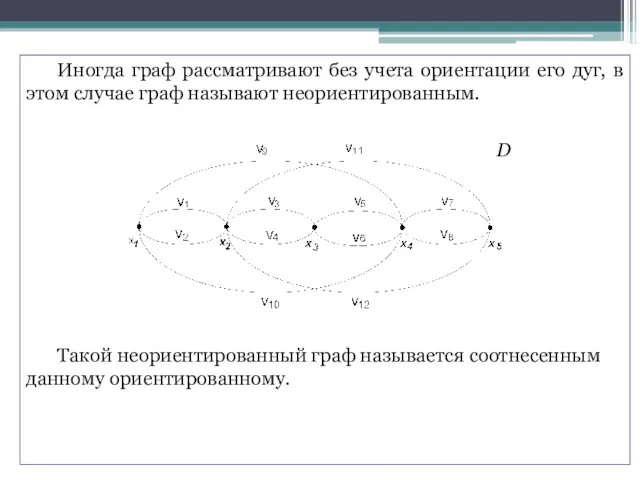
Иногда граф рассматривают без учета ориентации его дуг, в этом случае
Иногда граф рассматривают без учета ориентации его дуг, в этом случае
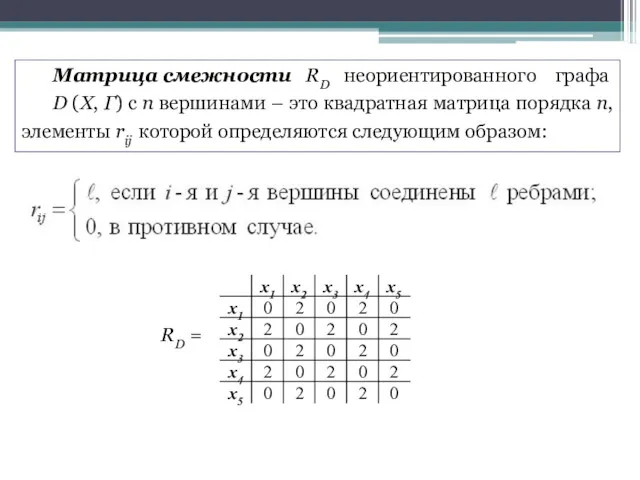
Матрица смежности RD неориентированного графа
D (X, Г) с n вершинами
Матрица смежности RD неориентированного графа
D (X, Г) с n вершинами
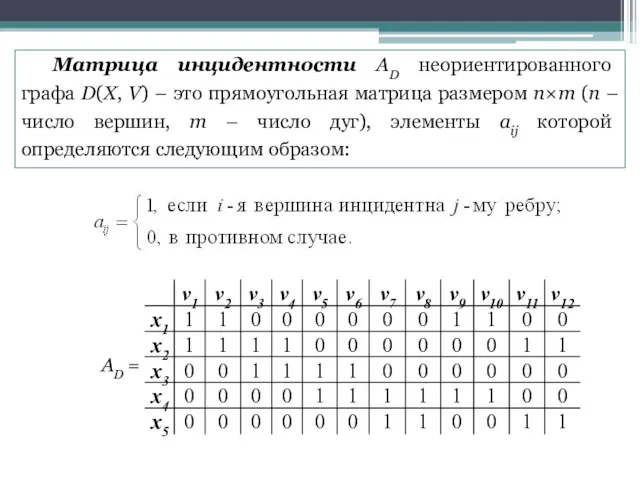
Матрица инцидентности AD неориентированного графа D(X, V) – это прямоугольная матрица
Матрица инцидентности AD неориентированного графа D(X, V) – это прямоугольная матрица
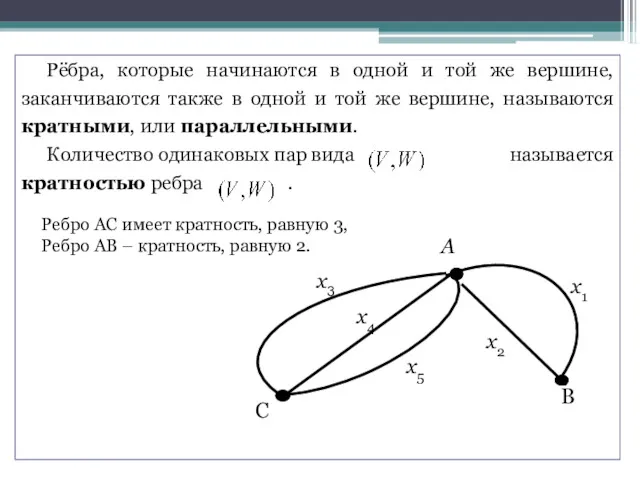
Рёбра, которые начинаются в одной и той же вершине, заканчиваются также
Рёбра, которые начинаются в одной и той же вершине, заканчиваются также
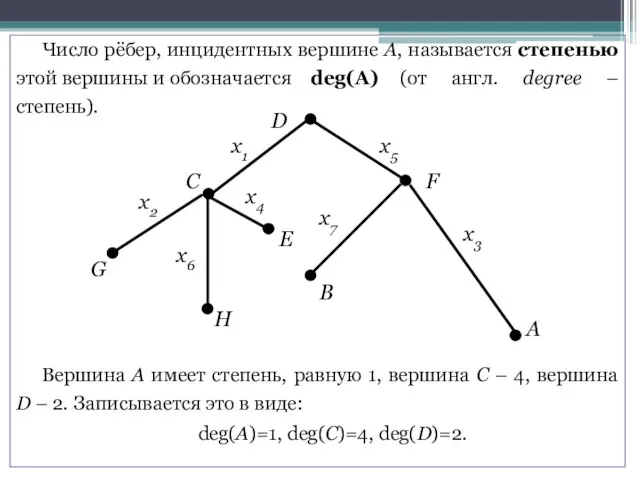
Число рёбер, инцидентных вершине А, называется степенью этой вершины и обозначается
Число рёбер, инцидентных вершине А, называется степенью этой вершины и обозначается
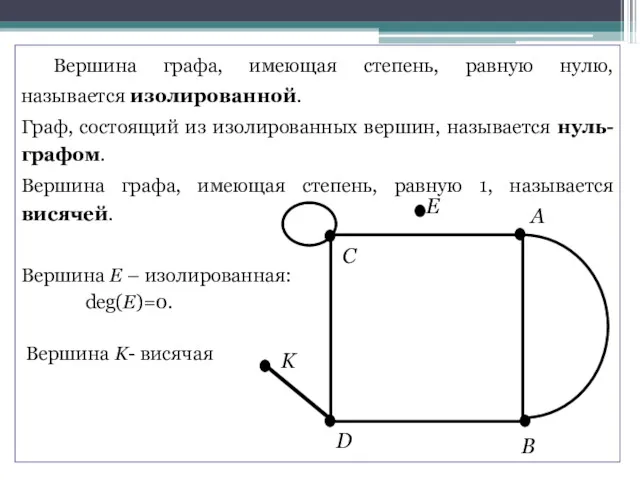
Вершина графа, имеющая степень, равную нулю, называется изолированной.
Граф, состоящий из
Вершина графа, имеющая степень, равную нулю, называется изолированной.
Граф, состоящий из
3 Типы графов
Граф без петель и кратных ребер называется простым. Граф
3 Типы графов
Граф без петель и кратных ребер называется простым. Граф
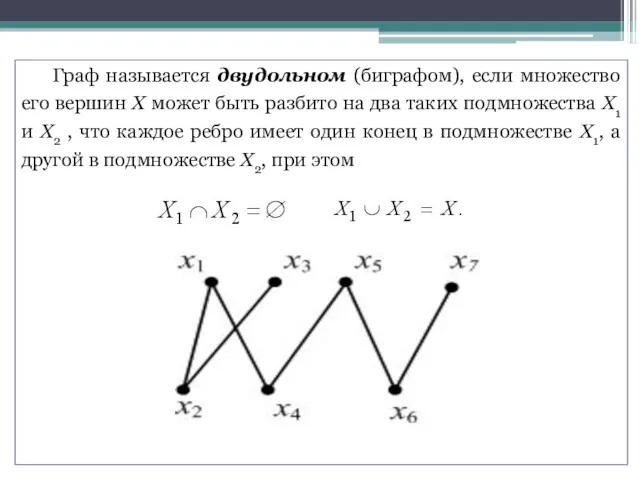
Граф называется двудольном (биграфом), если множество его вершин X может быть
Граф называется двудольном (биграфом), если множество его вершин X может быть
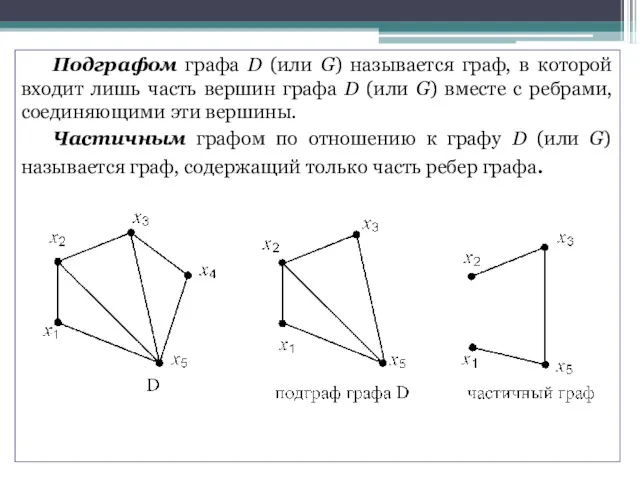
Подграфом графа D (или G) называется граф, в которой входит лишь
Подграфом графа D (или G) называется граф, в которой входит лишь
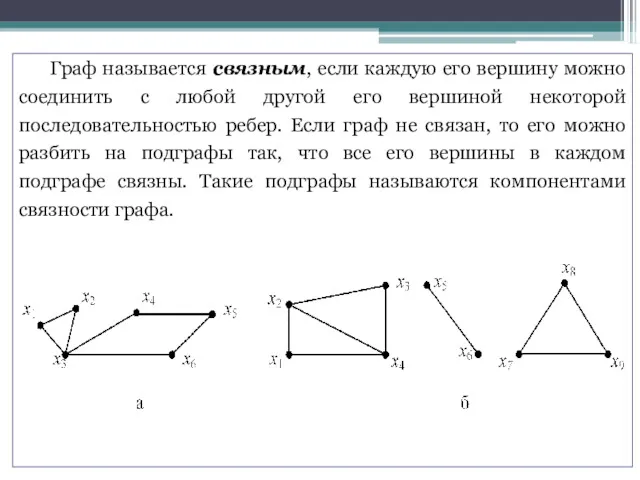
Граф называется связным, если каждую его вершину можно соединить с любой
Граф называется связным, если каждую его вершину можно соединить с любой
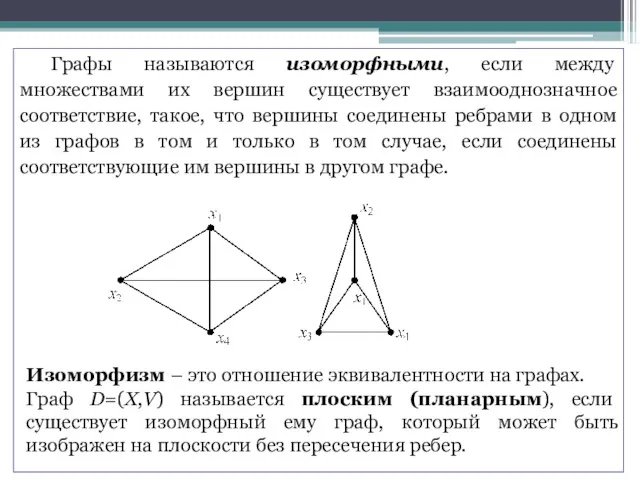
Графы называются изоморфными, если между множествами их вершин существует взаимооднозначное соответствие,
Графы называются изоморфными, если между множествами их вершин существует взаимооднозначное соответствие,
4 Расстояния и пути в графах. Центры и периферийные вершины
Путь в
4 Расстояния и пути в графах. Центры и периферийные вершины
Путь в
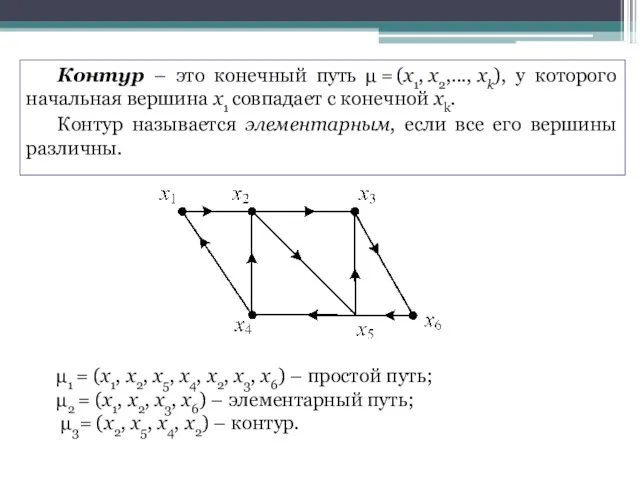
Контур – это конечный путь μ = (х1, х2,..., хk), у которого начальная вершина х1
Контур – это конечный путь μ = (х1, х2,..., хk), у которого начальная вершина х1
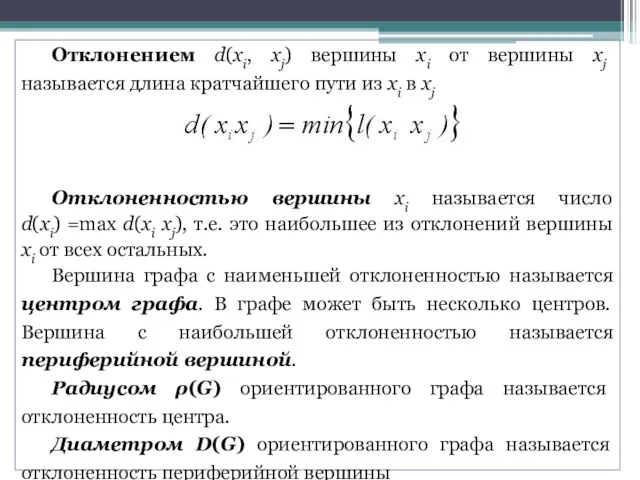
Отклонением d(xi, xj) вершины xi от вершины xj называется длина кратчайшего
Отклонением d(xi, xj) вершины xi от вершины xj называется длина кратчайшего
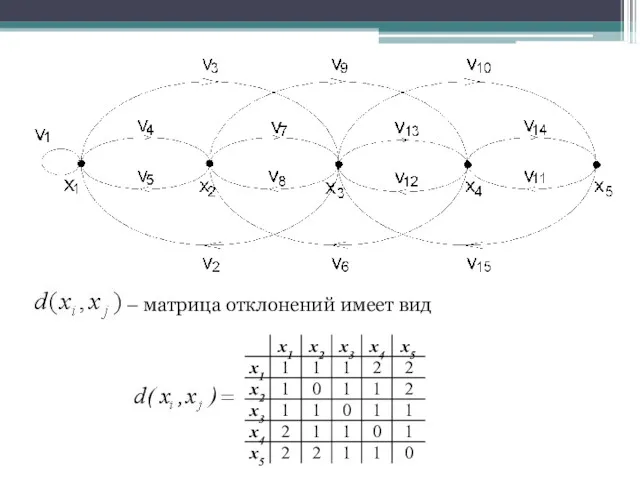
– матрица отклонений имеет вид
– матрица отклонений имеет вид
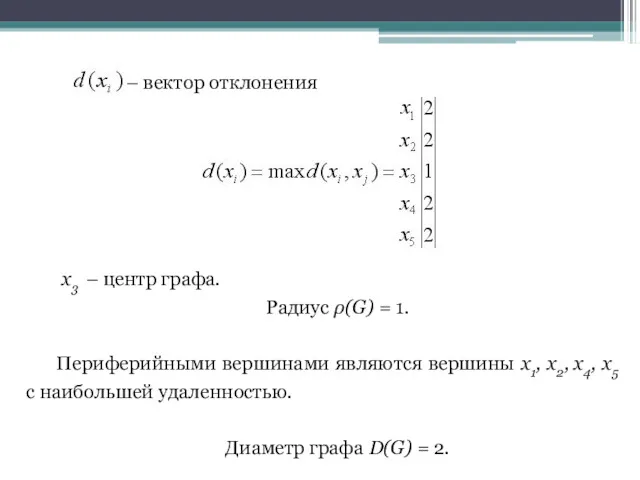
– вектор отклонения
х3 – центр графа.
Радиус ρ(G) = 1.
– вектор отклонения
х3 – центр графа.
Радиус ρ(G) = 1.
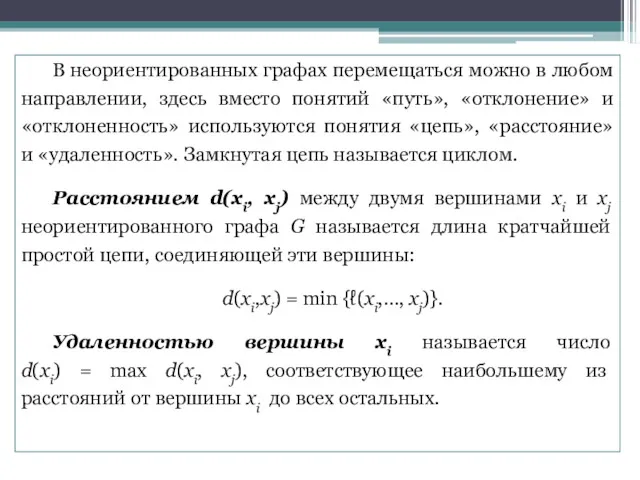
В неориентированных графах перемещаться можно в любом направлении, здесь вместо понятий
В неориентированных графах перемещаться можно в любом направлении, здесь вместо понятий
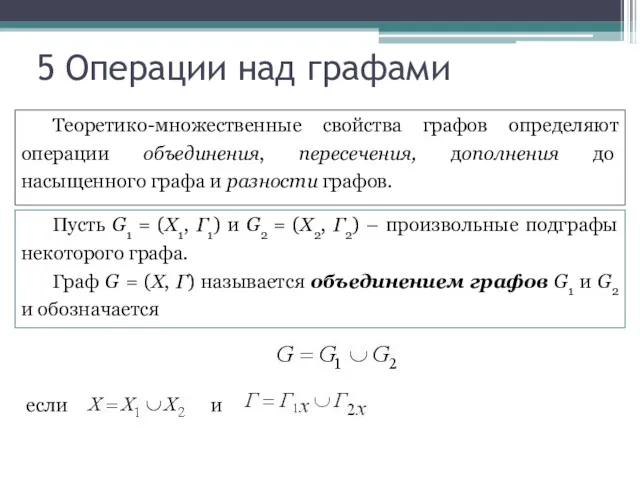
5 Операции над графами
Теоретико-множественные свойства графов определяют операции объединения, пересечения, дополнения
5 Операции над графами
Теоретико-множественные свойства графов определяют операции объединения, пересечения, дополнения

Граф G = (Х, Г) называется пересечением графов G1 и G2
Граф G = (Х, Г) называется пересечением графов G1 и G2
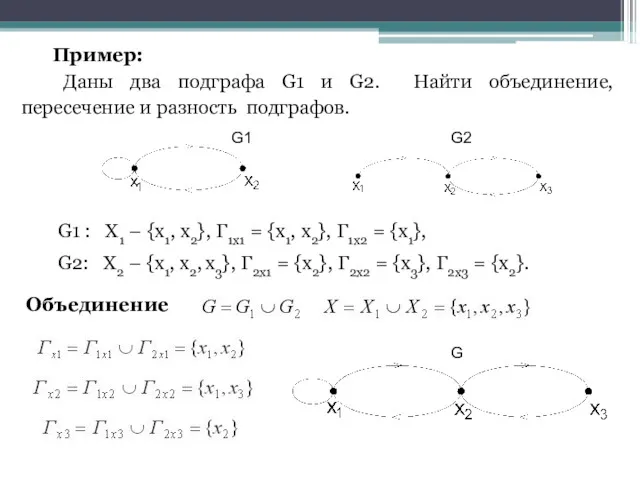
Пример:
Даны два подграфа G1 и G2. Найти объединение, пересечение и
Пример:
Даны два подграфа G1 и G2. Найти объединение, пересечение и
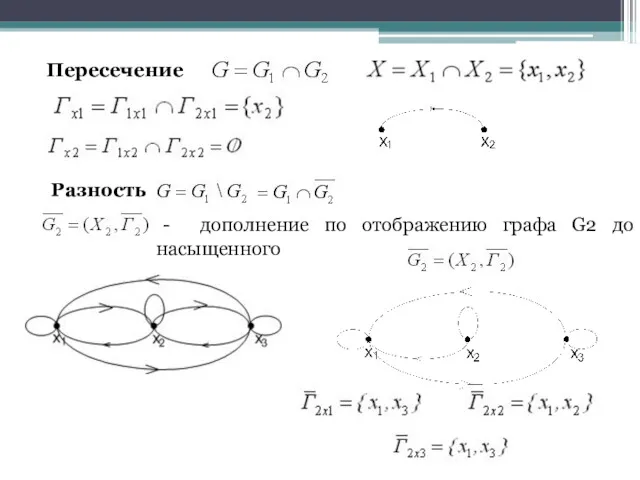
Пересечение
Разность
- дополнение по отображению графа G2 до насыщенного
Пересечение
Разность
- дополнение по отображению графа G2 до насыщенного
 Умножение десятичных дробей на натуральные числа
Умножение десятичных дробей на натуральные числа Симметрия. Виды симметрии
Симметрия. Виды симметрии Внеклассное мероприятие по сказке КОЛОБОК
Внеклассное мероприятие по сказке КОЛОБОК Окружность, хорды и диаметры, их свойства
Окружность, хорды и диаметры, их свойства Таблица умножения 3
Таблица умножения 3 Делители и кратные. 5 класс
Делители и кратные. 5 класс Угол между векторами. Скалярное произведение векторов
Угол между векторами. Скалярное произведение векторов Презентация по математике Умножение в Простоквашино
Презентация по математике Умножение в Простоквашино Комбинаторика. Правило произведения. Перестановки. Размещения
Комбинаторика. Правило произведения. Перестановки. Размещения Дифференциальные уравнения высших порядков
Дифференциальные уравнения высших порядков Правильные многоугольники
Правильные многоугольники Задачи на смеси и сплавы
Задачи на смеси и сплавы Пределы. Числовая последовательность. Предел числовой последовательности
Пределы. Числовая последовательность. Предел числовой последовательности Аксиомы стереометрии. Следствия из аксиом. Задачи
Аксиомы стереометрии. Следствия из аксиом. Задачи Понятие производной
Понятие производной Математика. Основные разделы теста. 1 семестр
Математика. Основные разделы теста. 1 семестр Конус. Конусы вокруг нас
Конус. Конусы вокруг нас Мистика и тайны загадочного числа пи
Мистика и тайны загадочного числа пи Графическое решение квадратных уравнений
Графическое решение квадратных уравнений Теорема Виета. Открытый урок по алгебре. 8 класс
Теорема Виета. Открытый урок по алгебре. 8 класс Сложение однозначных чисел с переходом через десяток вида + 6
Сложение однозначных чисел с переходом через десяток вида + 6 Подготовка к ОГЭ. Функции и графики: линейная функция
Подготовка к ОГЭ. Функции и графики: линейная функция Задачи и принципы квалиметрии
Задачи и принципы квалиметрии Бином Ньютона. Треугольник Паскаля
Бином Ньютона. Треугольник Паскаля Подібність трикутників
Подібність трикутників Понятие функции
Понятие функции Задачи по планиметрии
Задачи по планиметрии Цифра 9
Цифра 9