- Инвариантность систем

Содержание
- 2. Более простая постановка – требуется сделать по возможности независимой ту или иную переменную (обобщенную координату) от
- 3. Cтруктура системы
- 4. Упорядоченность системы заключается в том, что порядковый номер уравнения соответствует номеру обобщенной координаты, для которой это
- 5. Решаем систему относительно х1(S)
- 6. Условие инвариантности, при котором x1(t) не будет зависеть от возмущения f1(t) (полученное Щипачевым)
- 7. Теперь положим, что g(t) = 0, f3(t) = 0 и все начальные условия нулевые. Рассмотрим только
- 8. Но тогда оказывается, что x1(S) зависит от F(S), т.е. реализация абс. инвар. оказалась невозможной. Это объясняется
- 9. Это происходит (как следует из схемы) благодаря тому, что между f3 и х1 есть два канала,
- 10. Устойчивость движения Под устойчивостью функционирования сложной системы понимают способность системы сохранять требуемые свойства в условиях действий
- 11. Постановка задачи. y1…yn - вещественные переменные, характеризующие состояние системы. Y1…Yn – известные функции, удовлетворяющие условию существования
- 12. Невозмущенное движение – некоторое вполне определенное движение системы, подлежащее исследованию на устойчивость. Возмущению подвергаются только начальные
- 13. Обозначим yj – возмущенное движение; fj - невозмущенное движение; xj - отклонение или вариация xj=yj(t) –
- 14. Определение устойчивости движения по Ляпунову. Если по любому положительному числу ε, как бы оно не было
- 15. Рассмотрим сферу Выберем радиус √ε произвольно малым. Если движение устойчиво, то для этой сферы должна найтись
- 16. Особенности определения устойчивости по Ляпунову. 1. Возмущения накладываются только на начальные условия, что физически говорит о
- 17. Составим уравнения возмущенного движения yj(t) = fj(t) + xj(t) Подставим в уравнение (1) где - совокупность
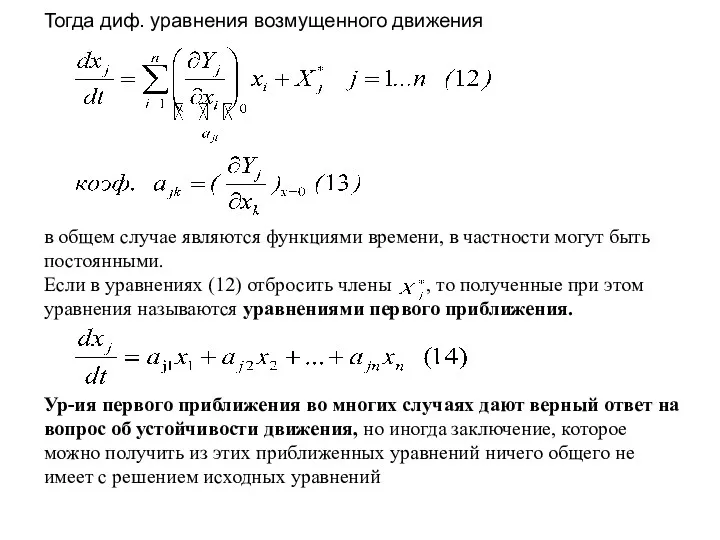
- 18. Тогда диф. уравнения возмущенного движения в общем случае являются функциями времени, в частности могут быть постоянными.
- 19. Пример. Пусть уравнения возмущенного движения имеют вид Умножим первое уравнение на х1, второе на х2 и
- 20. При α>0 r неограниченно возрастает при t→t0+1/αr0 [1-αr0(t-t0)=0 αr0t=1+αr0t0 t=t0+1/αr0 , т.е. при t=t0+1/αr0 знаменатель равен
- 21. При α
- 22. Прямой метод исследования устойчивости Так называют второй метод Ляпунова, который позволяет судить об устойчивости непосредственно по
- 23. Функции Ляпунова обладают специальными свойствами. Это непрерывные однозначные функции фазовых координат, определенные в области Rn Σxj2≤
- 24. Пусть V=V(x) непрерывна вместе с производными первого порядка: кроме того предположим, что V(x) знакоопределенная. Тогда при
- 25. Т.о. разложение знакоопределенной функции V в ряд по степеням x1…xn не содержит членов первой степени, т.е.
- 26. В линейной алгебре доказывается следующий критерий Сильвестра: Для того, чтобы квадратичная форма была определенно-положительной, необходимо и
- 27. Пример. Знакоопределенная функция Знакопостоянная функция V V x2 x2 x1 x1
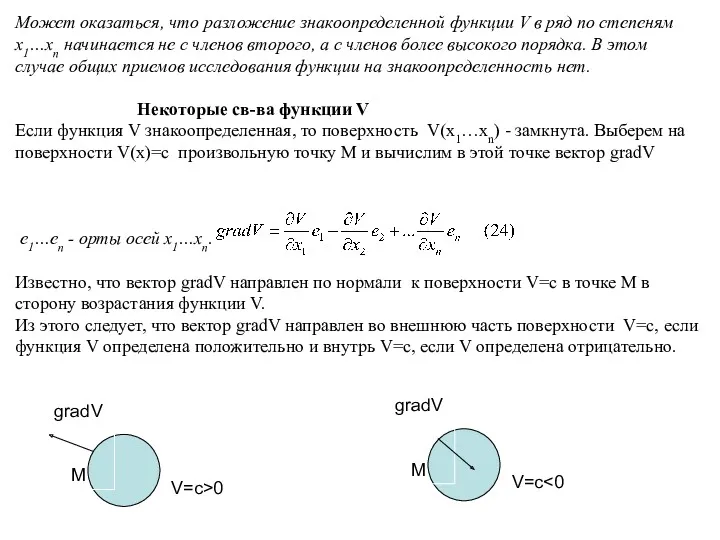
- 28. gradV M Может оказаться, что разложение знакоопределенной функции V в ряд по степеням x1…xn начинается не
- 29. Одновременно с функцией V будем рассматривать ее полную производную по времени t, взятую в предположении, что
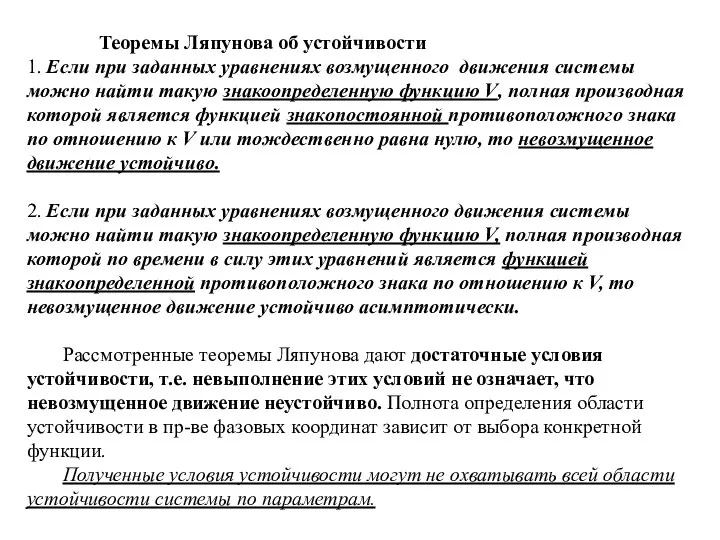
- 30. Теоремы Ляпунова об устойчивости 1. Если при заданных уравнениях возмущенного движения системы можно найти такую знакоопределенную
- 31. В нелинейных системах, в отличие от линейных, возможны случаи, когда невозмущенное движение устойчиво при «малых» отклонениях
- 32. Пример Рассмотрим функцию V=1+sin2x1-cos(x1-x2) Разложим эту функцию по степеням x1 и x2 sin2x1=x12+… cos(x1-x2)=1-1/2(x1-x2)2+… V=1+x12-1+1/2(x1-x2)2+…= 1/2(3x12-2x1x2+x22)+…
- 34. Скачать презентацию
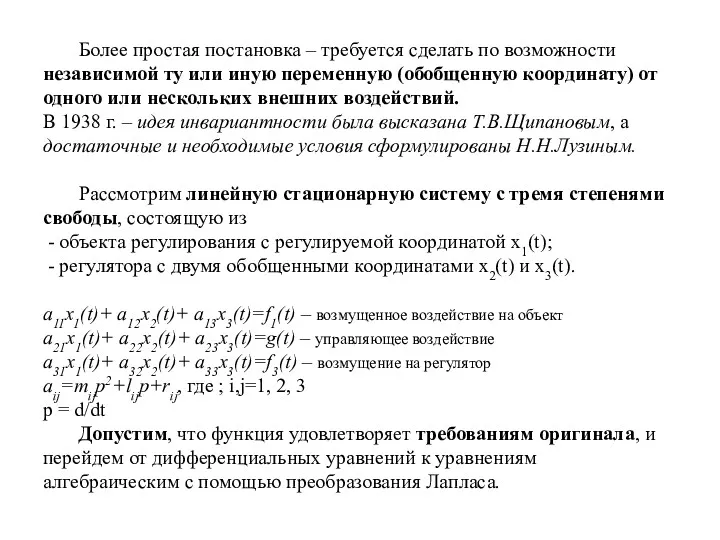
Более простая постановка – требуется сделать по возможности независимой ту или
Более простая постановка – требуется сделать по возможности независимой ту или
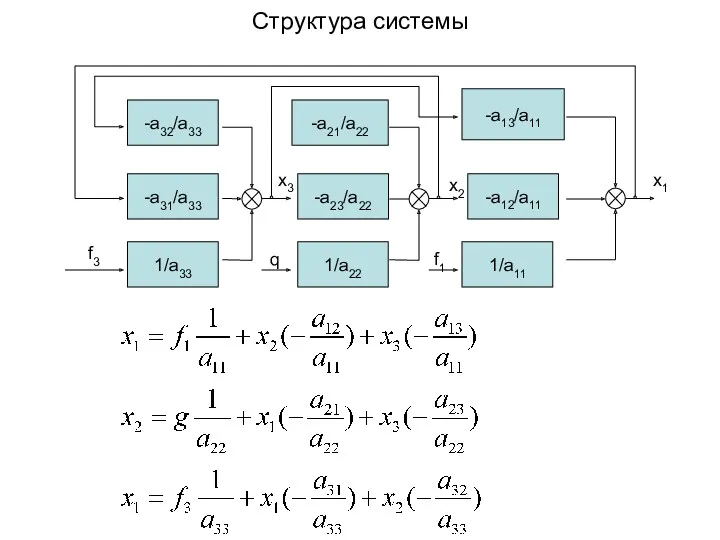
Cтруктура системы
Cтруктура системы
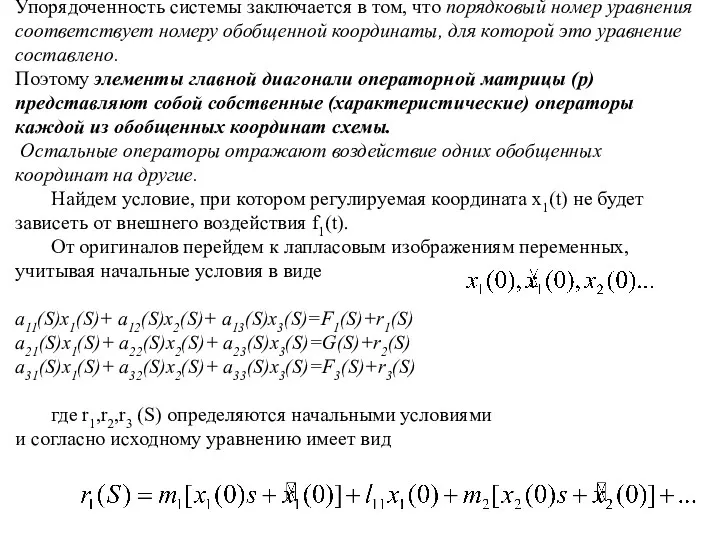
Упорядоченность системы заключается в том, что порядковый номер уравнения соответствует номеру
Упорядоченность системы заключается в том, что порядковый номер уравнения соответствует номеру
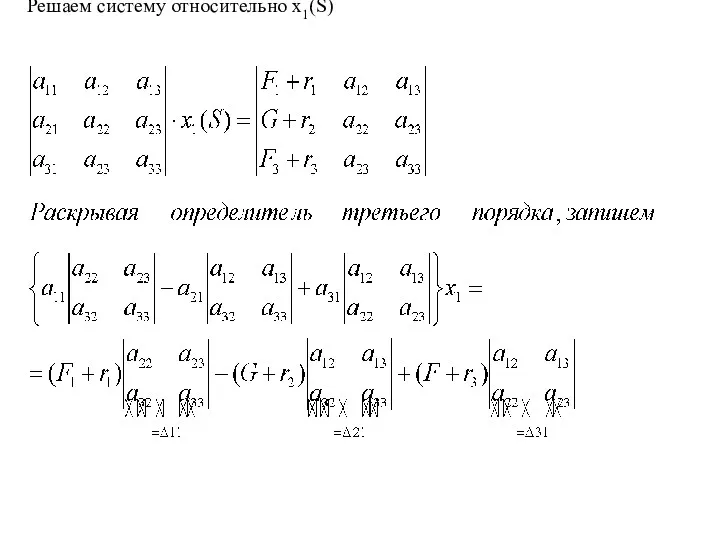
Решаем систему относительно х1(S)
Решаем систему относительно х1(S)
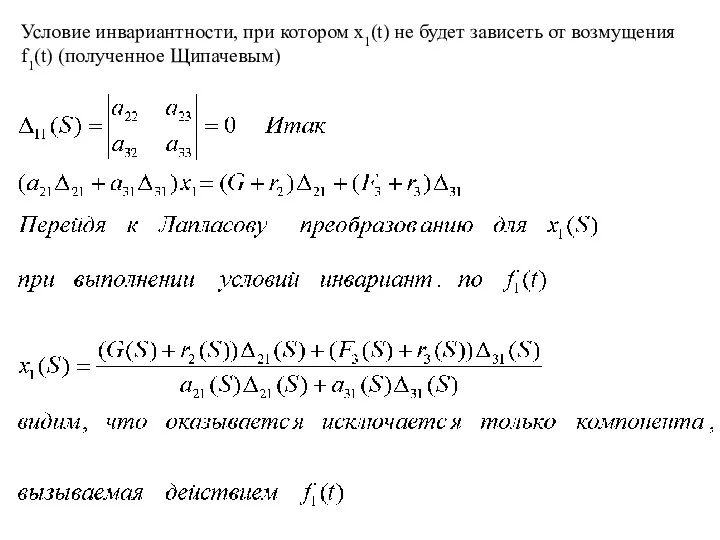
Условие инвариантности, при котором x1(t) не будет зависеть от возмущения f1(t)
Условие инвариантности, при котором x1(t) не будет зависеть от возмущения f1(t)
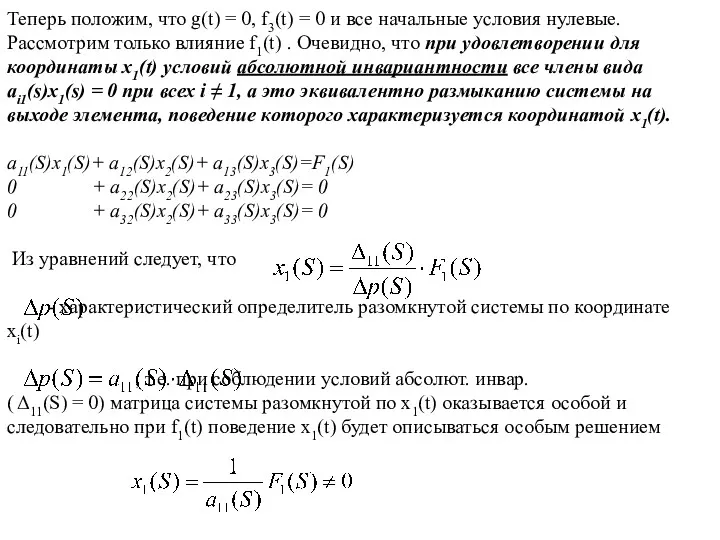
Теперь положим, что g(t) = 0, f3(t) = 0 и все
Теперь положим, что g(t) = 0, f3(t) = 0 и все
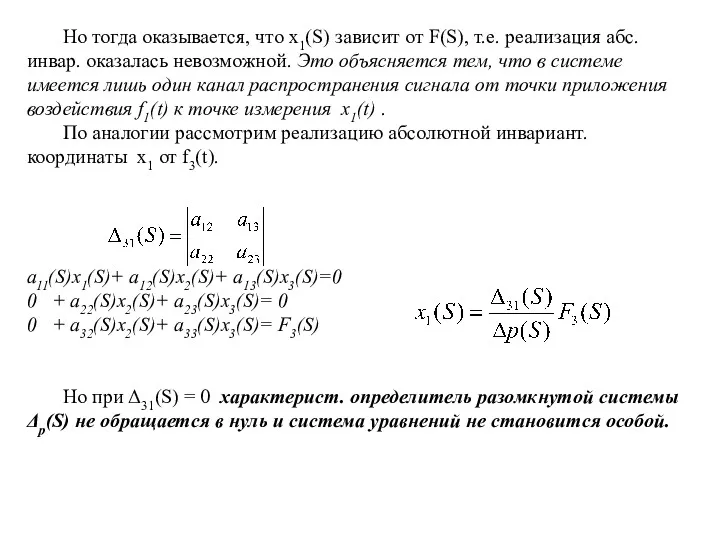
Но тогда оказывается, что x1(S) зависит от F(S), т.е. реализация абс.
Но тогда оказывается, что x1(S) зависит от F(S), т.е. реализация абс.
Это происходит (как следует из схемы) благодаря тому, что между f3
Это происходит (как следует из схемы) благодаря тому, что между f3
Устойчивость движения
Под устойчивостью функционирования сложной системы понимают способность системы сохранять
Устойчивость движения Под устойчивостью функционирования сложной системы понимают способность системы сохранять
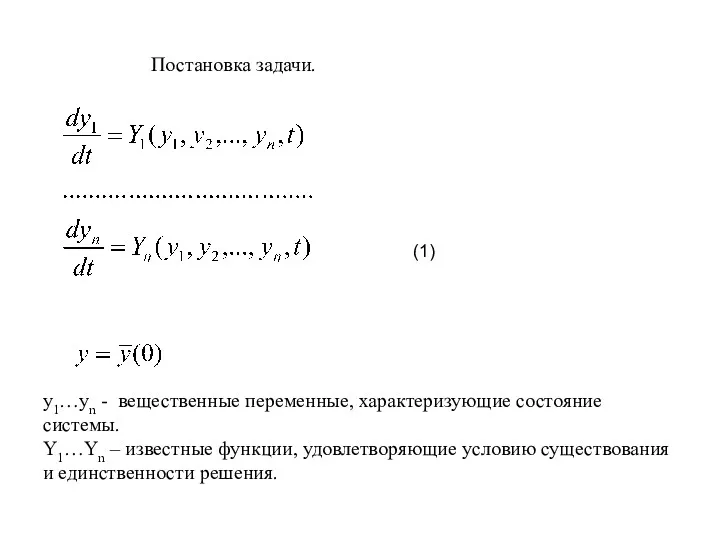
Постановка задачи.
y1…yn - вещественные переменные, характеризующие состояние системы.
Y1…Yn – известные функции,
Постановка задачи. y1…yn - вещественные переменные, характеризующие состояние системы. Y1…Yn – известные функции,
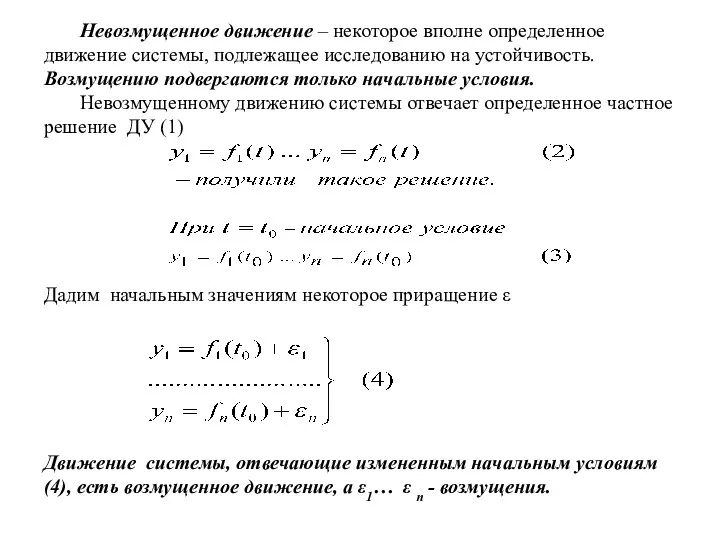
Невозмущенное движение – некоторое вполне определенное движение системы, подлежащее исследованию на
Невозмущенное движение – некоторое вполне определенное движение системы, подлежащее исследованию на
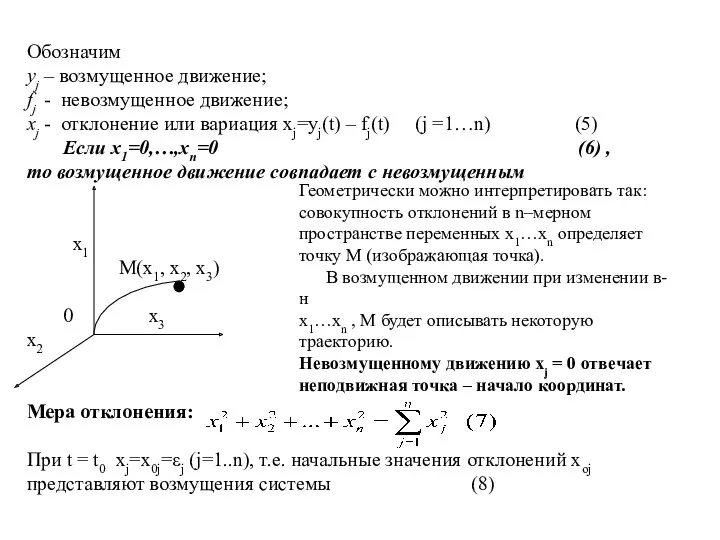
Обозначим
yj – возмущенное движение;
fj - невозмущенное движение;
xj - отклонение
Обозначим yj – возмущенное движение; fj - невозмущенное движение; xj - отклонение
Определение устойчивости движения по Ляпунову.
Если по любому положительному числу ε,
Определение устойчивости движения по Ляпунову. Если по любому положительному числу ε,
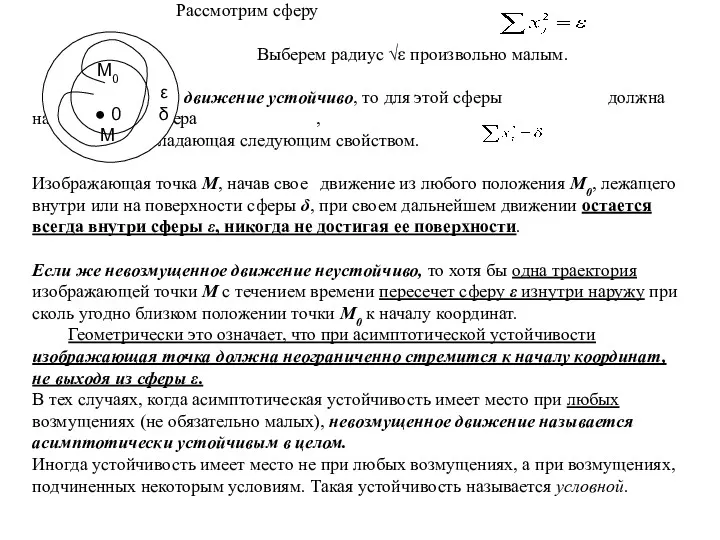
Рассмотрим сферу
Выберем радиус √ε произвольно малым.
Если движение устойчиво, то для
Рассмотрим сферу Выберем радиус √ε произвольно малым. Если движение устойчиво, то для
Особенности определения устойчивости по Ляпунову.
1. Возмущения накладываются только на начальные
Особенности определения устойчивости по Ляпунову. 1. Возмущения накладываются только на начальные
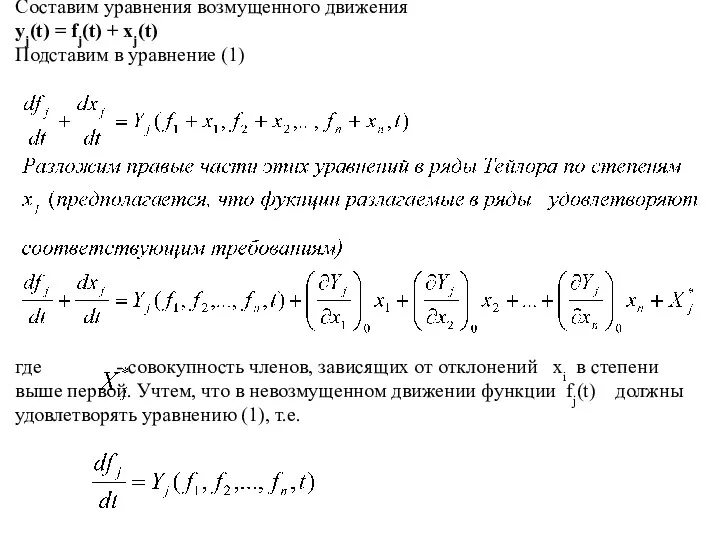
Составим уравнения возмущенного движения
yj(t) = fj(t) + xj(t)
Подставим в уравнение
Составим уравнения возмущенного движения yj(t) = fj(t) + xj(t) Подставим в уравнение
Тогда диф. уравнения возмущенного движения
в общем случае являются функциями времени,
Тогда диф. уравнения возмущенного движения в общем случае являются функциями времени,
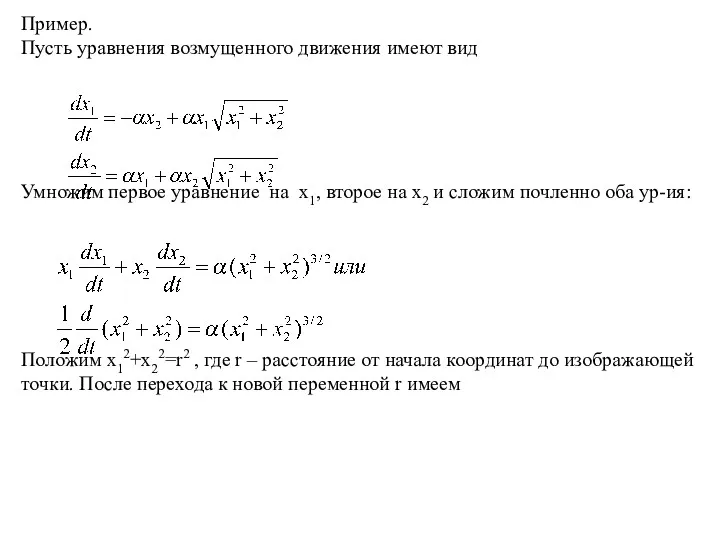
Пример.
Пусть уравнения возмущенного движения имеют вид
Умножим первое уравнение на х1, второе
Пример. Пусть уравнения возмущенного движения имеют вид Умножим первое уравнение на х1, второе
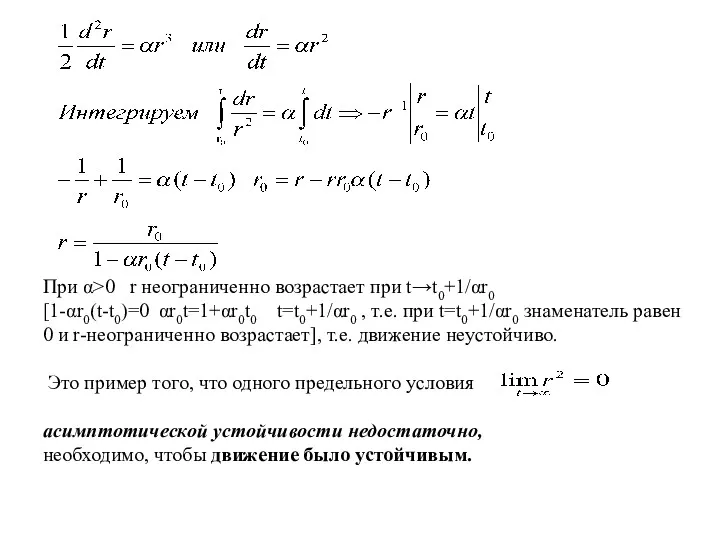
При α>0 r неограниченно возрастает при t→t0+1/αr0
[1-αr0(t-t0)=0 αr0t=1+αr0t0 t=t0+1/αr0 , т.е.
При α>0 r неограниченно возрастает при t→t0+1/αr0 [1-αr0(t-t0)=0 αr0t=1+αr0t0 t=t0+1/αr0 , т.е.
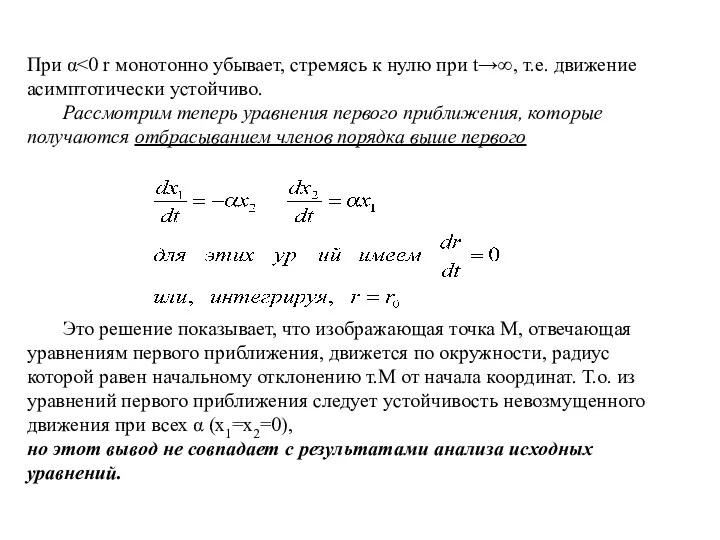
При α<0 r монотонно убывает, стремясь к нулю при t→∞, т.е.
При α<0 r монотонно убывает, стремясь к нулю при t→∞, т.е.
Прямой метод исследования устойчивости
Так называют второй метод Ляпунова, который позволяет судить
Прямой метод исследования устойчивости Так называют второй метод Ляпунова, который позволяет судить
Функции Ляпунова обладают специальными свойствами.
Это непрерывные однозначные функции фазовых
Функции Ляпунова обладают специальными свойствами. Это непрерывные однозначные функции фазовых
Пусть V=V(x) непрерывна вместе с производными первого порядка: кроме того предположим,
Пусть V=V(x) непрерывна вместе с производными первого порядка: кроме того предположим,
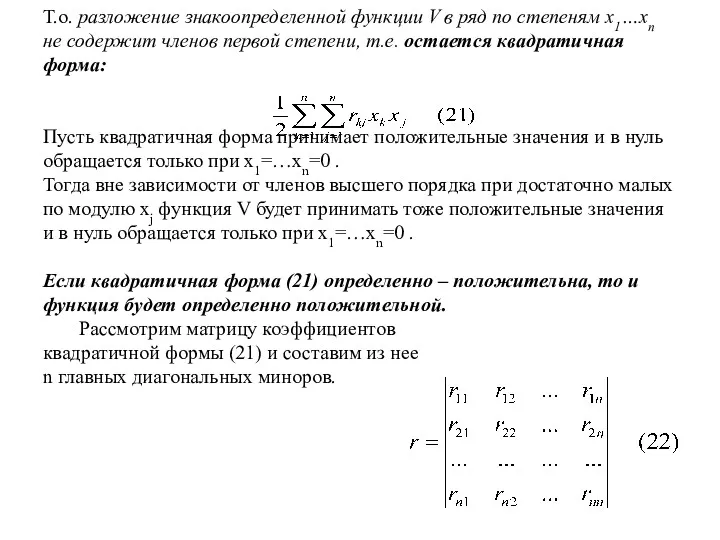
Т.о. разложение знакоопределенной функции V в ряд по степеням x1…xn не
Т.о. разложение знакоопределенной функции V в ряд по степеням x1…xn не
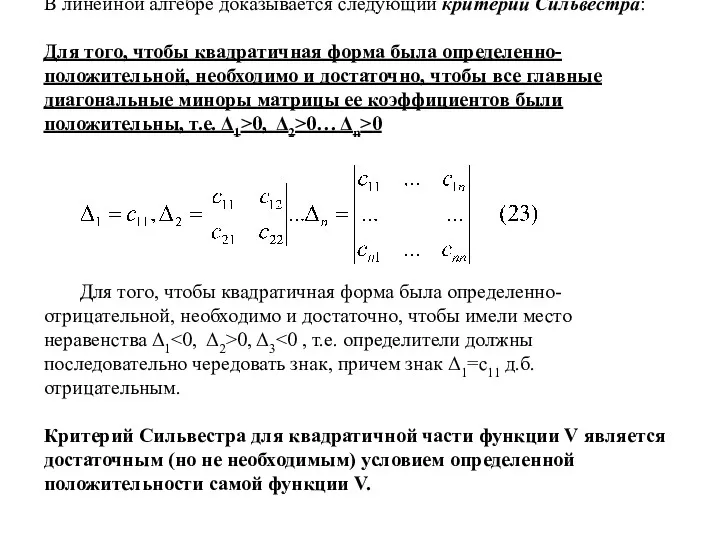
В линейной алгебре доказывается следующий критерий Сильвестра:
Для того, чтобы квадратичная
В линейной алгебре доказывается следующий критерий Сильвестра: Для того, чтобы квадратичная
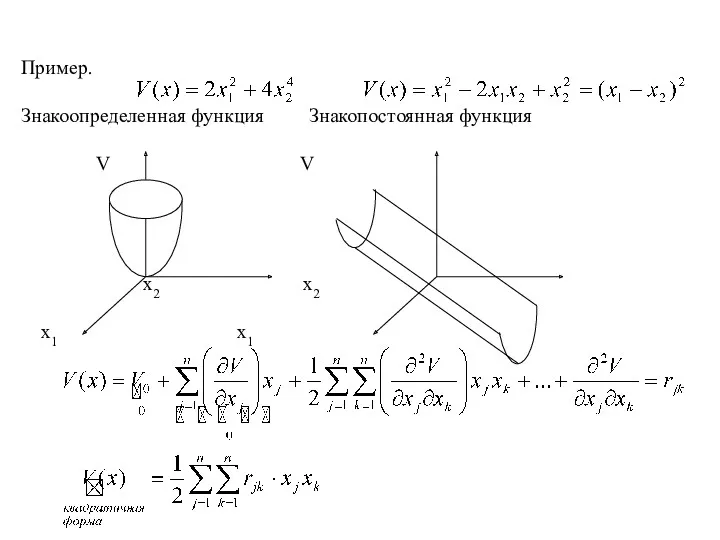
Пример.
Знакоопределенная функция Знакопостоянная функция
V V
x2 x2
x1 x1
Пример.
Знакоопределенная функция Знакопостоянная функция
V V
x2 x2
x1 x1
gradV
M
Может оказаться, что разложение знакоопределенной функции V в ряд по
gradV
M
Может оказаться, что разложение знакоопределенной функции V в ряд по
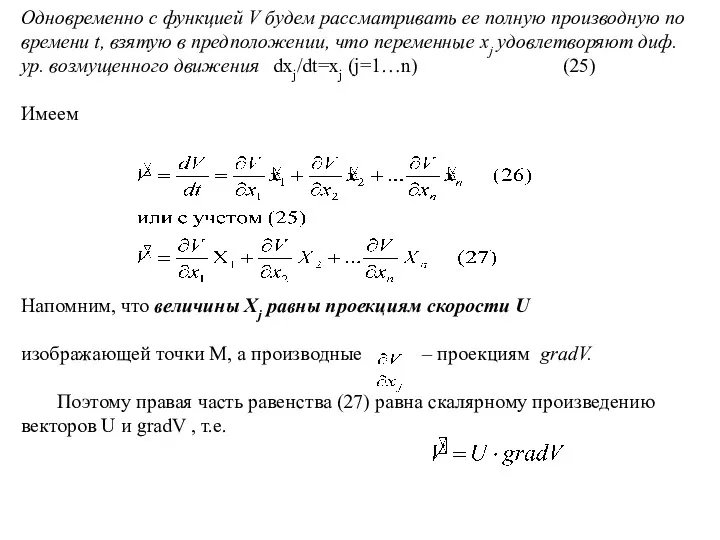
Одновременно с функцией V будем рассматривать ее полную производную по времени
Одновременно с функцией V будем рассматривать ее полную производную по времени
Теоремы Ляпунова об устойчивости
1. Если при заданных уравнениях возмущенного движения системы
Теоремы Ляпунова об устойчивости 1. Если при заданных уравнениях возмущенного движения системы
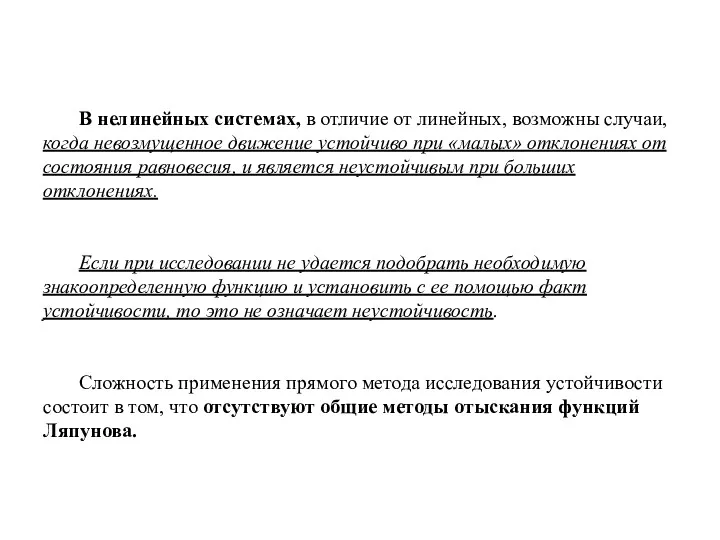
В нелинейных системах, в отличие от линейных, возможны случаи, когда невозмущенное
В нелинейных системах, в отличие от линейных, возможны случаи, когда невозмущенное
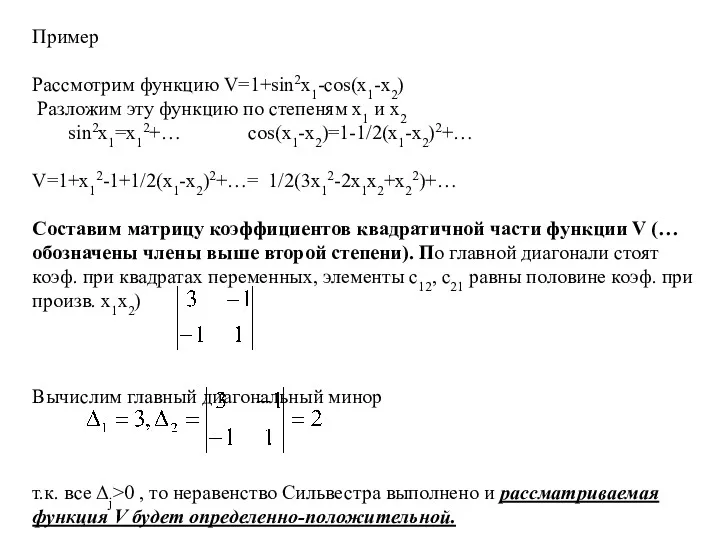
Пример
Рассмотрим функцию V=1+sin2x1-cos(x1-x2)
Разложим эту функцию по степеням x1 и x2
sin2x1=x12+…
Пример Рассмотрим функцию V=1+sin2x1-cos(x1-x2) Разложим эту функцию по степеням x1 и x2 sin2x1=x12+…
 Урок математики Решение уравнений 3 класс УМК Школа России
Урок математики Решение уравнений 3 класс УМК Школа России Угол. Прямой угол
Угол. Прямой угол Простейшие задачи в координатах (9 класс)
Простейшие задачи в координатах (9 класс) Тест. Задания В8, ЕГЭ по математике
Тест. Задания В8, ЕГЭ по математике Медианы, биссектрисы и высоты треугольника
Медианы, биссектрисы и высоты треугольника Случайные величины, законы их распределения и числовые характеристики
Случайные величины, законы их распределения и числовые характеристики Куб (текше) және оның көлемі
Куб (текше) және оның көлемі Множество значений функции (+ презентация)
Множество значений функции (+ презентация) Объем цилиндра и призмы
Объем цилиндра и призмы Числовые неравенства и их свойства
Числовые неравенства и их свойства Обратная матрица. (Тема 7)
Обратная матрица. (Тема 7) 4 класс задача на движение
4 класс задача на движение Площади плоских фигур
Площади плоских фигур История возникновения нуля, его значение в жизни человека
История возникновения нуля, его значение в жизни человека Законы арифметических действий
Законы арифметических действий Луч и угол. 7 класс
Луч и угол. 7 класс Показательная функция и её применение
Показательная функция и её применение Зеркальное отражение предметов.1 класс
Зеркальное отражение предметов.1 класс Меры длины
Меры длины Презентация по геометрии по теме Теорема синусов, теорема косинусов 9 класс
Презентация по геометрии по теме Теорема синусов, теорема косинусов 9 класс методическая разработка урока математики Единицы времени.Век
методическая разработка урока математики Единицы времени.Век Смотр знаний по теме Дробные числа 5 класс
Смотр знаний по теме Дробные числа 5 класс Способы разложения многочлена на множители
Способы разложения многочлена на множители Урок математики. (Часть 2. 1 класс)
Урок математики. (Часть 2. 1 класс) Арифметические действия с числами. Задания для устного счета. 6 класс
Арифметические действия с числами. Задания для устного счета. 6 класс Статистика
Статистика Внетабличное умножение и деление. Памятники Кремля.3 класс
Внетабличное умножение и деление. Памятники Кремля.3 класс Дециметр. Предложение
Дециметр. Предложение