- IRob2305: Introduction to Robotics

Содержание
- 2. AGENDA Homogenous Transformation Matrix Link Connections Denavit-Hartneberg Parameters DH-Parameters
- 3. WHAT DO WE KNOW FOR NOW? We can make a complete rotation matrix all the way
- 4. CAN WE DO IT WITH DISPLACEMENT VECTORS?
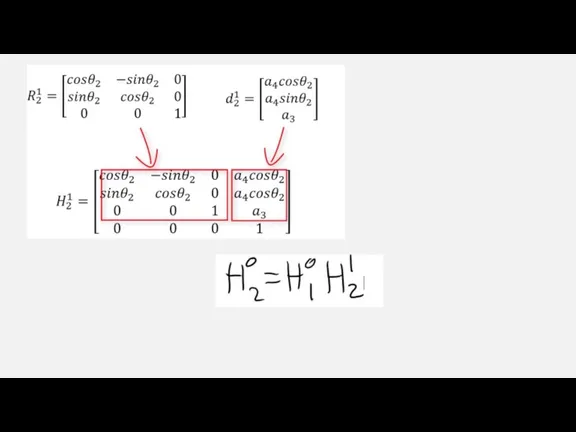
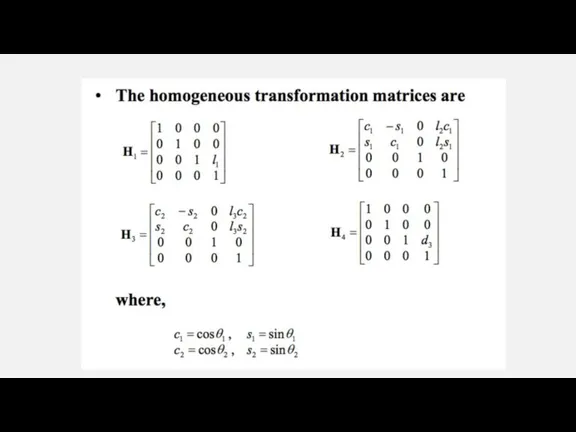
- 5. HOMOGENOUS TRANSFORMATION MATRIX
- 6. We want to find the rotation matrix that tells us how the end effector frame is
- 8. DENAVIT-HARTENBERG METHOD Industry standard Faster Obscures the meaning behind the rotation matrix and displacement vector
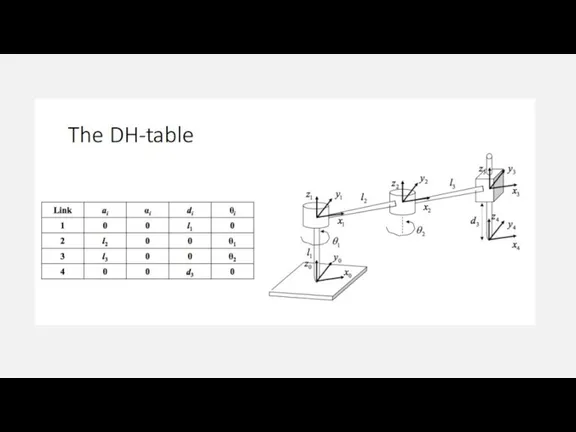
- 9. STEP 1: ASSIGN FRAMES ACCORDING TO THE 4 DH RULES STEP 2: FILL OUT THE DH
- 10. NOTES: Assigning coordinate systems:Assign Zi along the axis of joint i. For a revolute joint, the
- 12. SYMBOL TERMINOLOGIES : θ : A rotation about the z-axis. d : The distance on the
- 14. Example
- 19. Скачать презентацию

AGENDA
Homogenous Transformation Matrix
Link Connections
Denavit-Hartneberg Parameters
DH-Parameters
AGENDA
Homogenous Transformation Matrix
Link Connections
Denavit-Hartneberg Parameters
DH-Parameters
WHAT DO WE KNOW FOR NOW?
We can make a complete rotation
WHAT DO WE KNOW FOR NOW?
We can make a complete rotation
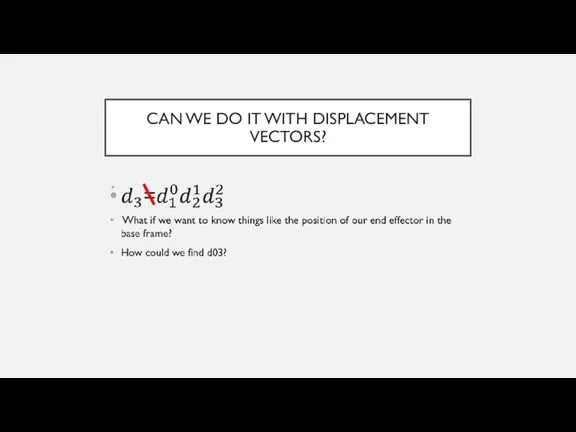
CAN WE DO IT WITH DISPLACEMENT VECTORS?
CAN WE DO IT WITH DISPLACEMENT VECTORS?
HOMOGENOUS TRANSFORMATION MATRIX
HOMOGENOUS TRANSFORMATION MATRIX
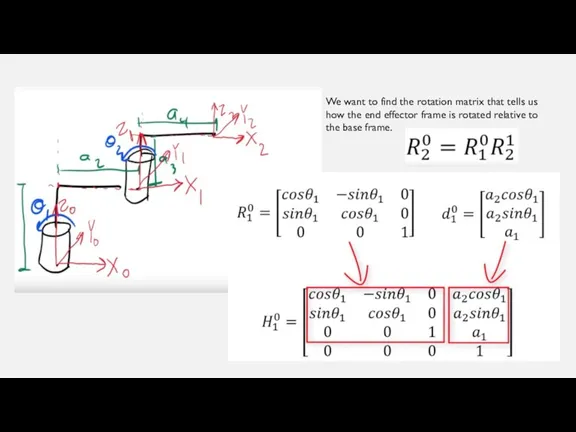
We want to find the rotation matrix that tells us how
We want to find the rotation matrix that tells us how
DENAVIT-HARTENBERG METHOD
Industry standard
Faster
Obscures the meaning behind the rotation matrix and displacement
DENAVIT-HARTENBERG METHOD
Industry standard
Faster
Obscures the meaning behind the rotation matrix and displacement
STEP 1: ASSIGN FRAMES ACCORDING TO THE 4 DH RULES
STEP 2:
STEP 1: ASSIGN FRAMES ACCORDING TO THE 4 DH RULES
STEP 2:

NOTES:
Assigning coordinate systems:Assign Zi along the axis of joint i.
For a revolute
NOTES:
Assigning coordinate systems:Assign Zi along the axis of joint i.
For a revolute
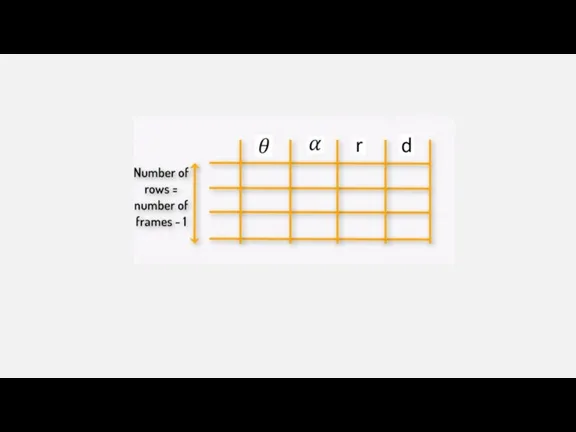
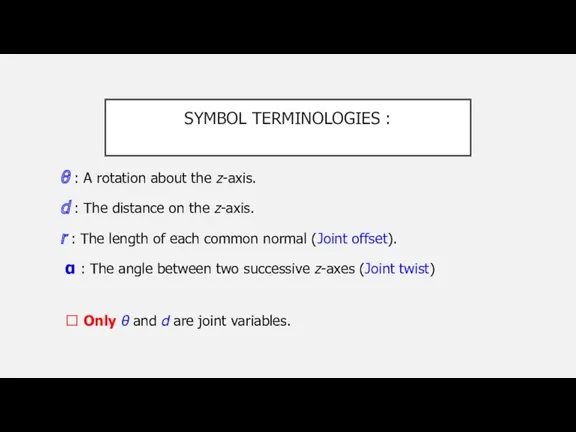
SYMBOL TERMINOLOGIES :
θ : A rotation about the z-axis.
d
SYMBOL TERMINOLOGIES :
θ : A rotation about the z-axis.
d
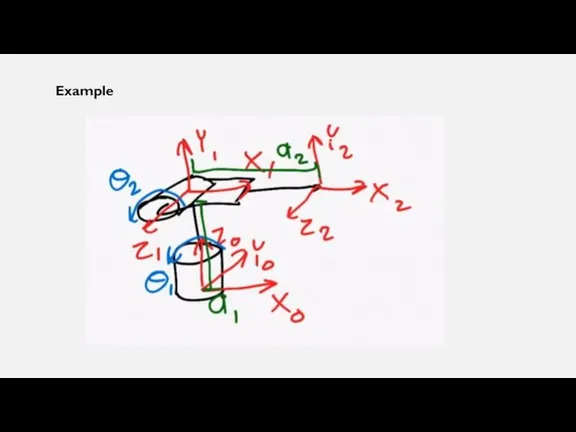
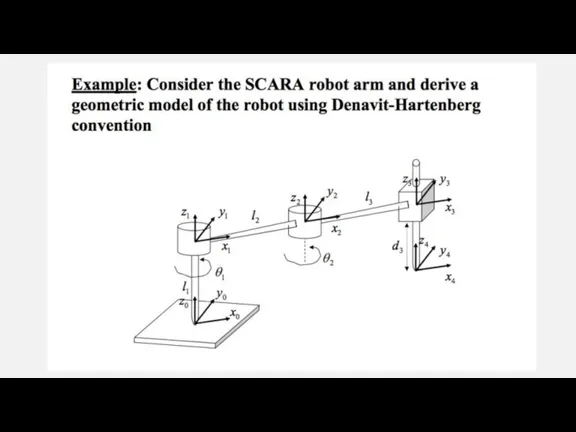
Example
Example
 Параллельность прямых и плоскостей
Параллельность прямых и плоскостей Метод координат в пространстве
Метод координат в пространстве Келісім белгісі.Келісім белгісін қолданудың тәжірибелік үлгісі (Мендель заңы)
Келісім белгісі.Келісім белгісін қолданудың тәжірибелік үлгісі (Мендель заңы) Свойства параллельных прямых
Свойства параллельных прямых Зачетная система подготовки учащихся к выпускному экзамену по математике в форме ГИА
Зачетная система подготовки учащихся к выпускному экзамену по математике в форме ГИА Признаки возрастания и убывания функции
Признаки возрастания и убывания функции Математическая викторина (7-8 класс)
Математическая викторина (7-8 класс) Основы фрактальной теории, знакомство с математическим обоснованием графической интерпретации фрактальных образов
Основы фрактальной теории, знакомство с математическим обоснованием графической интерпретации фрактальных образов Деление на 2
Деление на 2 Преобразование графиков функций
Преобразование графиков функций Отношение величин математика. 6 класс
Отношение величин математика. 6 класс Дифференциал функции
Дифференциал функции Теорема Пифагора
Теорема Пифагора Нормированные пространства и Л.Н.О. Функциональный анализ
Нормированные пространства и Л.Н.О. Функциональный анализ Сложение и вычитание многозначных чисел. Алгоритм письменного вычисления
Сложение и вычитание многозначных чисел. Алгоритм письменного вычисления Применение интеграла для нахождения площадей объектов ландшафтного дизайна
Применение интеграла для нахождения площадей объектов ландшафтного дизайна Математический КВН с учащимися 8-9 классов
Математический КВН с учащимися 8-9 классов Теорема о равенстве односторонних углов. Теорема о свойстве односторонних углов
Теорема о равенстве односторонних углов. Теорема о свойстве односторонних углов Координатная плоскость. 6 класс
Координатная плоскость. 6 класс Изучение взаимосвязи между явлениями методами корреляционно-регрессионного анализа
Изучение взаимосвязи между явлениями методами корреляционно-регрессионного анализа Производные высших порядков
Производные высших порядков Сокращение дробей
Сокращение дробей Геометрический материал к уроку
Геометрический материал к уроку Тест по математике по теме Величины.
Тест по математике по теме Величины. Дискретная математика. Основные понятия теории множеств
Дискретная математика. Основные понятия теории множеств Отношение двух чисел. Работа с математической моделью
Отношение двух чисел. Работа с математической моделью Табличное сложение. Приём сложения чисел с переходом через десяток
Табличное сложение. Приём сложения чисел с переходом через десяток Состав числа
Состав числа