- К практической работе № 2 МИМНИ

Содержание
- 2. ЭКВИВАЛЕНТНАЯ СХЕМА ДЛЯ МОДЕЛИРОВАНИЯ ЗАКОНОМЕРНОСТЕЙ ДВИЖЕНИЯ УЖА
- 3. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ МИНИМИЗАЦИИ ЭНЕРГОЗАТРАТ ПРИ ВОЛНООБРАЗНОМ ДВИЖЕНИИ УЖА =1. = 1.
- 4. РАСЧЕТНАЯ СХЕМА ДЛЯ МОДЕЛИРОВАНИЯ ЗАКОНОМЕРНОСТЕЙ ДВИЖЕНИЯ УЖА
- 5. РАСЧЕТНАЯ СХЕМА МОДЕЛИРОВАНИЕ ОПТИМАЛЬНОГО СКЛАДЫВАНИЯ ШАРНИРНО – СОЧЛЕНЕННОГО КОЛЕСНОГО ШАССИ
- 6. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ Ес = Е1 + Е2 min Ec = min (E1 + E2) = min
- 7. dA0 = δ da0 2dA0(M20 + dM20) = dM20(A0 – a0δ)
- 8. Изложенные теоретические предпосылки легли в основу технического решения, признанного изобретением (“Трелевочно – транспортная машина”, по заявке
- 9. Реальные объекты моделирования
- 10. Реальные объекты моделирования
- 11. Реальные объекты моделирования (BELL - B60E)
- 12. Реальные объекты моделирования (BELL - B60E)
- 13. Реальные объекты моделирования (VOLVO-A25C)
- 14. Реальные объекты моделирования (VOLVO-A25C)
- 15. Реальные объекты моделирования (“Кировец” K – 708.2)
- 16. РАСЧЕТНАЯ СХЕМА МАНЕВРА СКИДЕРА
- 18. Реальные объекты моделирования
- 19. Простейшая интерпретация технического решения
- 20. Простейшая интерпретация технического решения
- 21. Блок – схема микропроцессорной системы оптимального управления гидравлическим механизмом складывания полурам шасси колесной машины
- 22. Пример компоновочной схемы гидромеханизма поворота сочлененного колесного шасси
- 23. ОЦЕНКА ЭНЕРГОЭФФЕКТИВНОСТИ МАНЕВРА
- 24. Ес, Дж ψп, град Теоретически установлено, что возможно оптимальное управление процессом складывания полурам при повороте шарнирно-сочлененного
- 25. Пример управления гидромеханизмом В сторону гидроцилиндра В сторону противоположную гидроцилиндру
- 26. Пример управления гидромеханизмом В сторону гидроцилиндра В сторону противоположную гидроцилиндру
- 27. Интерпретация общего технического решения
- 29. Скачать презентацию
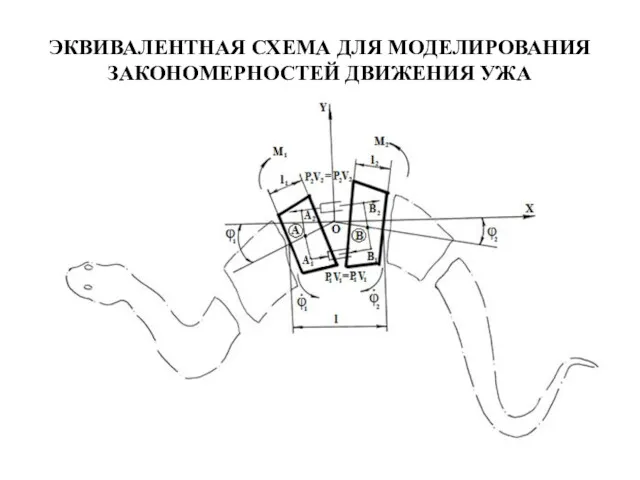
ЭКВИВАЛЕНТНАЯ СХЕМА ДЛЯ МОДЕЛИРОВАНИЯ
ЗАКОНОМЕРНОСТЕЙ ДВИЖЕНИЯ УЖА
ЭКВИВАЛЕНТНАЯ СХЕМА ДЛЯ МОДЕЛИРОВАНИЯ
ЗАКОНОМЕРНОСТЕЙ ДВИЖЕНИЯ УЖА
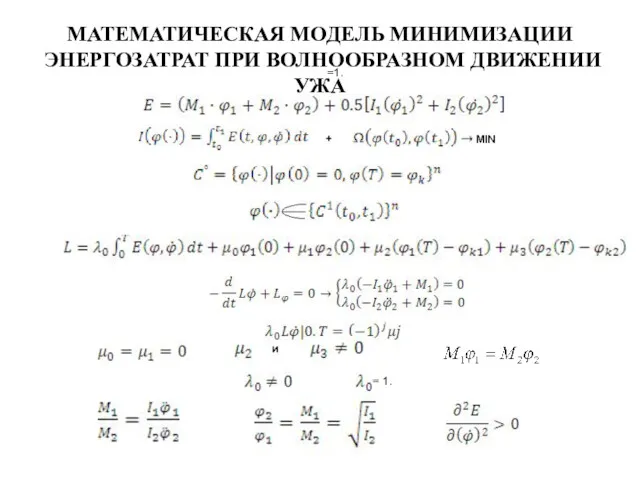
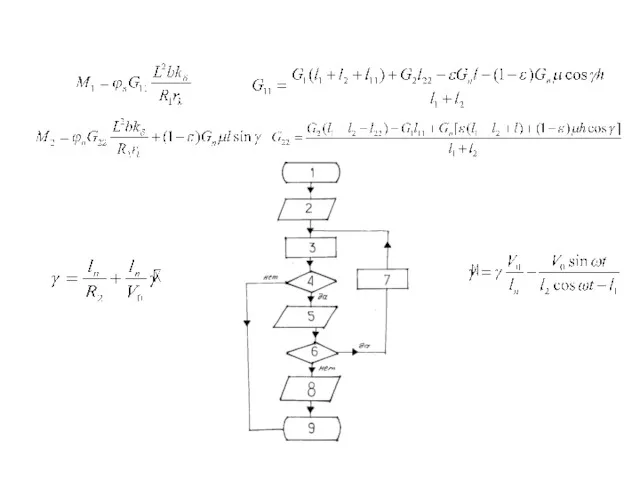
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ МИНИМИЗАЦИИ ЭНЕРГОЗАТРАТ ПРИ ВОЛНООБРАЗНОМ ДВИЖЕНИИ УЖА
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ МИНИМИЗАЦИИ ЭНЕРГОЗАТРАТ ПРИ ВОЛНООБРАЗНОМ ДВИЖЕНИИ УЖА
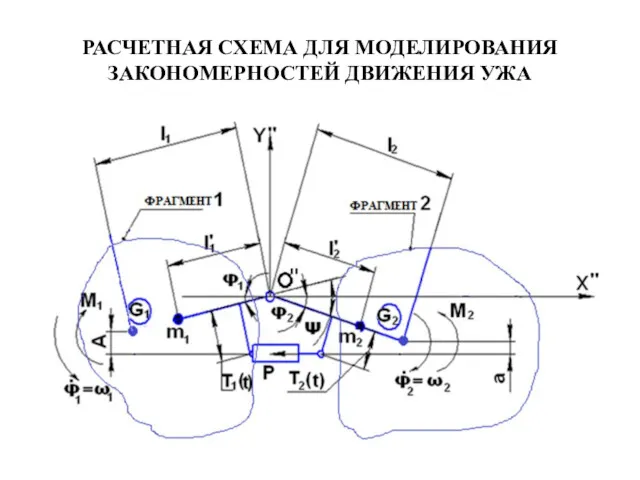
РАСЧЕТНАЯ СХЕМА ДЛЯ МОДЕЛИРОВАНИЯ
ЗАКОНОМЕРНОСТЕЙ ДВИЖЕНИЯ УЖА
РАСЧЕТНАЯ СХЕМА ДЛЯ МОДЕЛИРОВАНИЯ
ЗАКОНОМЕРНОСТЕЙ ДВИЖЕНИЯ УЖА
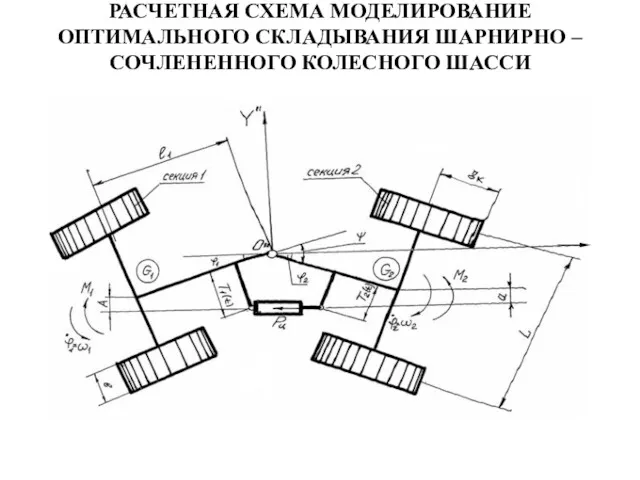
РАСЧЕТНАЯ СХЕМА МОДЕЛИРОВАНИЕ ОПТИМАЛЬНОГО СКЛАДЫВАНИЯ ШАРНИРНО – СОЧЛЕНЕННОГО КОЛЕСНОГО ШАССИ
РАСЧЕТНАЯ СХЕМА МОДЕЛИРОВАНИЕ ОПТИМАЛЬНОГО СКЛАДЫВАНИЯ ШАРНИРНО – СОЧЛЕНЕННОГО КОЛЕСНОГО ШАССИ
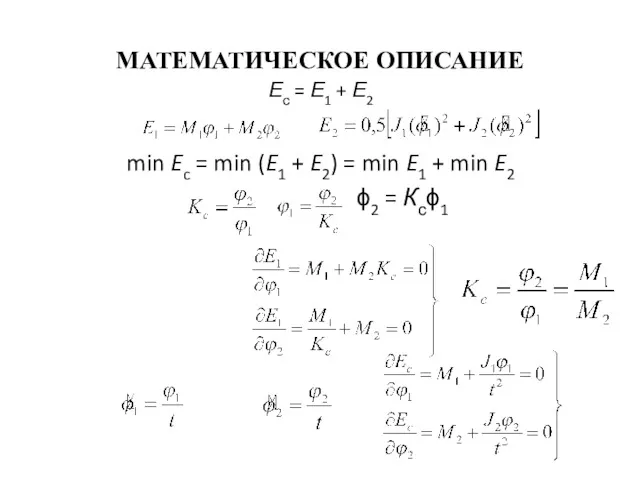
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
Ес = Е1 + Е2
min Ec = min (E1 +
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
Ес = Е1 + Е2
min Ec = min (E1 +
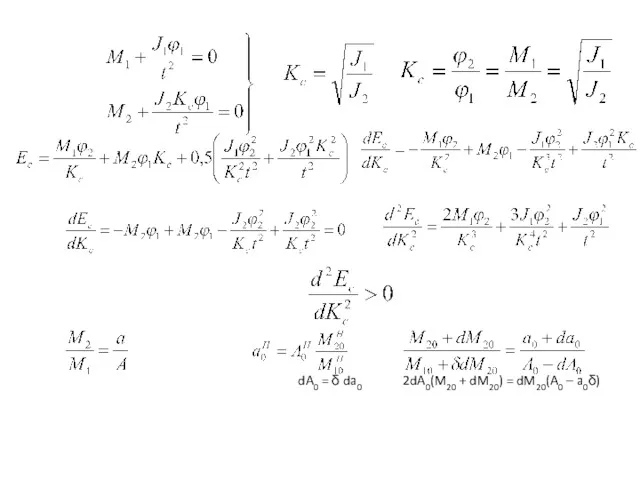
dA0 = δ da0 2dA0(M20 + dM20) = dM20(A0 – a0δ)
dA0 = δ da0 2dA0(M20 + dM20) = dM20(A0 – a0δ)
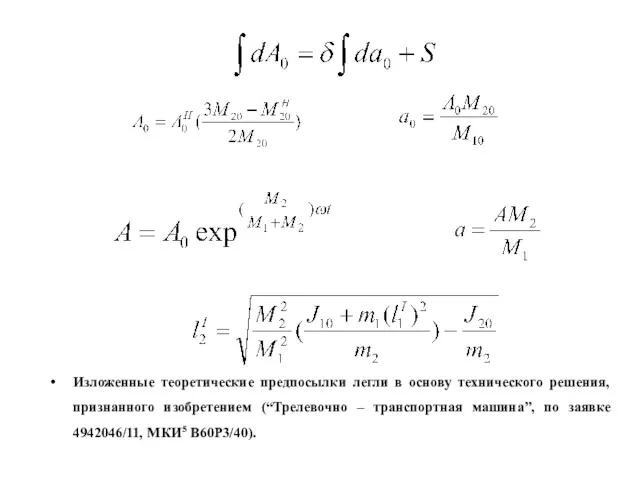
Изложенные теоретические предпосылки легли в основу технического решения, признанного изобретением (“Трелевочно
Изложенные теоретические предпосылки легли в основу технического решения, признанного изобретением (“Трелевочно

Реальные объекты моделирования
Реальные объекты моделирования

Реальные объекты моделирования
Реальные объекты моделирования

Реальные объекты моделирования
(BELL - B60E)
Реальные объекты моделирования
(BELL - B60E)

Реальные объекты моделирования
(BELL - B60E)
Реальные объекты моделирования
(BELL - B60E)

Реальные объекты моделирования
(VOLVO-A25C)
Реальные объекты моделирования
(VOLVO-A25C)

Реальные объекты моделирования
(VOLVO-A25C)
Реальные объекты моделирования
(VOLVO-A25C)

Реальные объекты моделирования
(“Кировец” K – 708.2)
Реальные объекты моделирования
(“Кировец” K – 708.2)
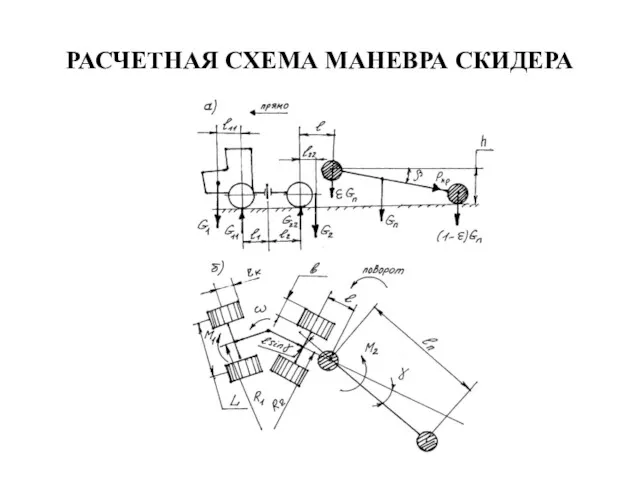
РАСЧЕТНАЯ СХЕМА МАНЕВРА СКИДЕРА
РАСЧЕТНАЯ СХЕМА МАНЕВРА СКИДЕРА

Реальные объекты моделирования
Реальные объекты моделирования

Простейшая интерпретация технического решения
Простейшая интерпретация технического решения
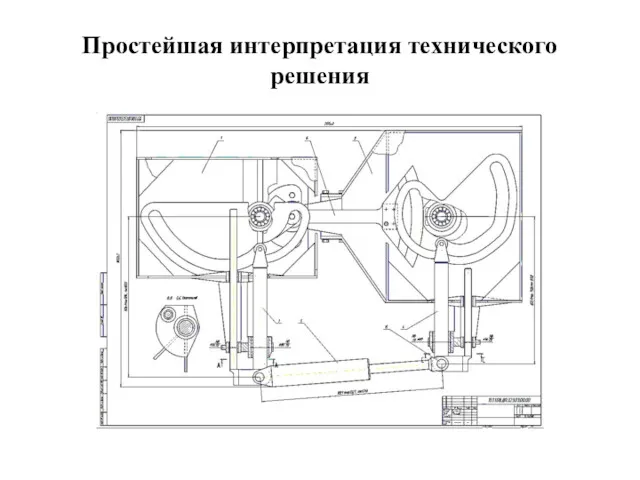
Простейшая интерпретация технического решения
Простейшая интерпретация технического решения
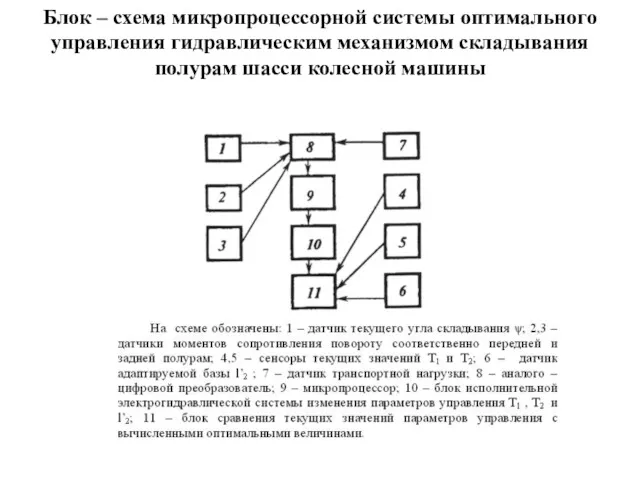
Блок – схема микропроцессорной системы оптимального управления гидравлическим механизмом складывания полурам
Блок – схема микропроцессорной системы оптимального управления гидравлическим механизмом складывания полурам
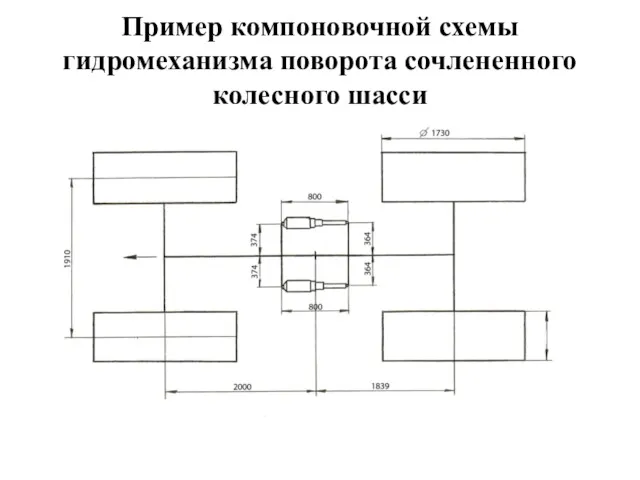
Пример компоновочной схемы гидромеханизма поворота сочлененного колесного шасси
Пример компоновочной схемы гидромеханизма поворота сочлененного колесного шасси
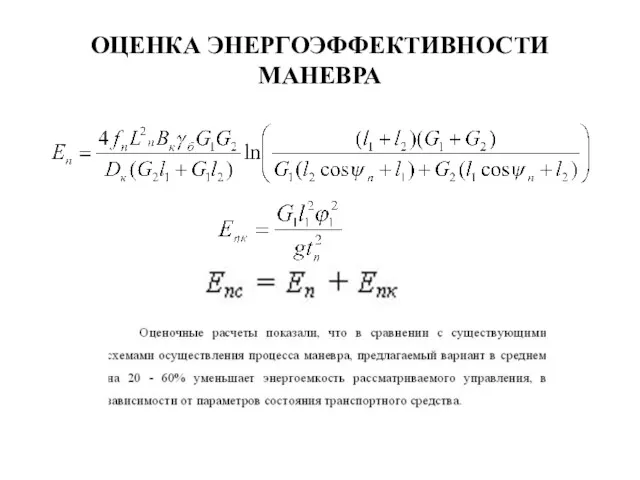
ОЦЕНКА ЭНЕРГОЭФФЕКТИВНОСТИ МАНЕВРА
ОЦЕНКА ЭНЕРГОЭФФЕКТИВНОСТИ МАНЕВРА

Ес, Дж
ψп, град
Теоретически установлено, что возможно оптимальное управление процессом складывания полурам
Ес, Дж
ψп, град
Теоретически установлено, что возможно оптимальное управление процессом складывания полурам
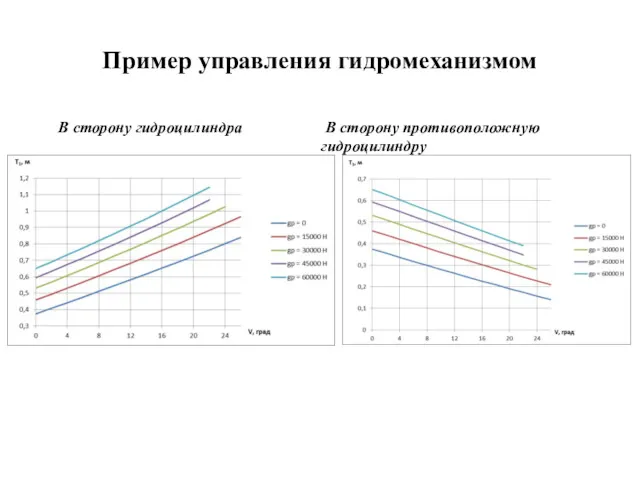
Пример управления гидромеханизмом
В сторону гидроцилиндра
В сторону противоположную гидроцилиндру
Пример управления гидромеханизмом
В сторону гидроцилиндра
В сторону противоположную гидроцилиндру
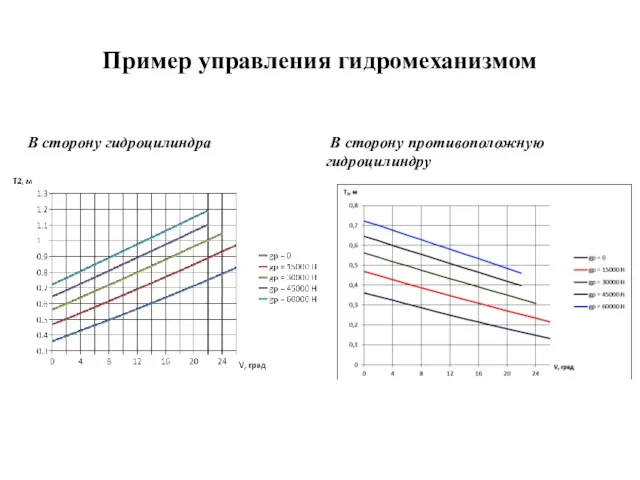
Пример управления гидромеханизмом
В сторону гидроцилиндра
В сторону противоположную гидроцилиндру
Пример управления гидромеханизмом
В сторону гидроцилиндра
В сторону противоположную гидроцилиндру
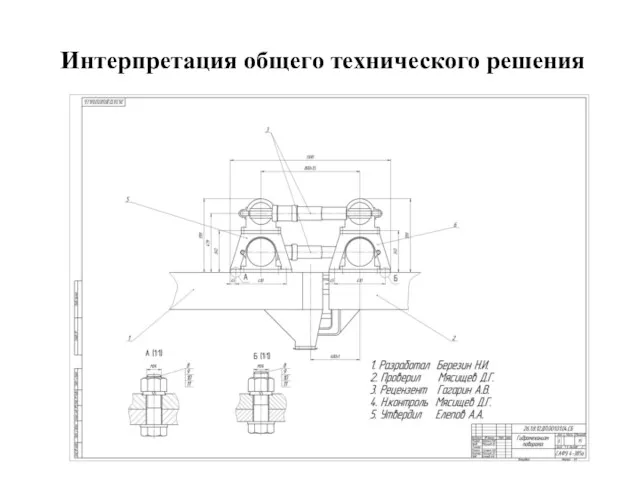
Интерпретация общего технического решения
Интерпретация общего технического решения
 Устный счет на уроках математики в начальной школе
Устный счет на уроках математики в начальной школе Функция арифметического квадратного корня у х
Функция арифметического квадратного корня у х Меры длины. Закрепление.
Меры длины. Закрепление. Снижение размерности пространства. Метод главных компонент
Снижение размерности пространства. Метод главных компонент Умножение и деление смешанных чисел
Умножение и деление смешанных чисел Спектральные характеристики стационарных случайных функций. Cлучайные процессы. Лекция 3
Спектральные характеристики стационарных случайных функций. Cлучайные процессы. Лекция 3 Масштаб и его виды
Масштаб и его виды Сложение и вычитание устные приёмы
Сложение и вычитание устные приёмы Презентация Сложение и вычитание чисел в пределах 10
Презентация Сложение и вычитание чисел в пределах 10 Окружность. Касательная к окружности. Центральные и вписанные углы
Окружность. Касательная к окружности. Центральные и вписанные углы Математический аукцион. Задачи
Математический аукцион. Задачи Формулы сокращенного умножения. Квадрат суммы
Формулы сокращенного умножения. Квадрат суммы Математическая викторина Своя игра для учащихся 5 классов
Математическая викторина Своя игра для учащихся 5 классов Эконометрика
Эконометрика Выражения 1класс Петерсон
Выражения 1класс Петерсон Математика
Математика Интегрированный урок английского языка и математики в 5 классе
Интегрированный урок английского языка и математики в 5 классе Поворот плоскости на угол
Поворот плоскости на угол Производная функции
Производная функции Функция. График функции. 7 класс
Функция. График функции. 7 класс Алгебраические выражения
Алгебраические выражения Иррациональные числа
Иррациональные числа Мәдениетінде математика ғылымының дамуы
Мәдениетінде математика ғылымының дамуы 20231010_proektnaya_rabota_hasanova_r.r
20231010_proektnaya_rabota_hasanova_r.r Интегрированный урок по математике и ПДД
Интегрированный урок по математике и ПДД Учим таблицу умножения на два.
Учим таблицу умножения на два. Стандартный вид числа
Стандартный вид числа 20230511_urok_7_klass
20230511_urok_7_klass