- Методы оптимизации объектов

Содержание
- 2. Оптимизация При поиске экстремальной точки осуществляется локальное изучение поверхности отклика. Экстремальное значение отклика достигается с помощью
- 3. Применение численных методов Главное отличие численных методов от аналитических в том, что действия выполняются не с
- 4. ОПТИМИЗАЦИЯ ОДНОФАКТОРНЫХ ОБЪЕКТОВ.
- 5. Деление отрезка пополам Существует довольно очевидная теорема: "Если непрерывная функция на концах некоторого интервала имеет значения
- 6. Метод золотого сечения L1 > L2 ; L2 / L1 = 0,618 Х4 = 0,618 (Х2
- 7. Метод Фибоначчи Числа Фибоначчи: F1 = 1, F2 =1, F3 = 2, F4 = 3. Fn
- 8. Метод парабол Наиболее часто используемый машинный метод Пусть есть функция с минимумом на отрезке ab. Выбирается
- 9. Метод средней точки возможен только для функции, где берется первая производная. В этом случае вычисление значений
- 10. Метод Хорд Если на отрезке ab производная имеет разные знаки то обязательно найдется точка экстремума
- 11. Метод Ньютона Функция должна быть дважды дифференцируемая, причем Корень уравнения ищут приближенно, используя метод касательных. В
- 12. Метод перебора (для многомодульных функций) Разбиение отрезков на равные части и проверка каждой из точек, т.е.
- 13. Метод ломаных линий Строят аппроксимирующие кусочно-линейные функции с параметрами:
- 14. Оптимизация многофакторных объектов
- 15. Графическая интерпретация задачи Принцип многофакторности отражает новый подход к эксперименту в задачах с многими факторами. При
- 16. Метод случайного поиска Направление поиска не параллельно ни одной из осей. При достижении частного экстремума перемещение
- 17. Метод Гаусса – Зейделя Суть метода заключается в эквивалентной замене общей многопараметрической задачи поиска экстремума критерия
- 18. Метод Хука – Дживса Исследуют покоординатный спуск в окрестностях данной точки и перемещаются в направлении убывания
- 19. Метод сопряженных направлений Суть метода такова. Выбирается некоторая начальная точка х[0] и выполняется одномерный поиск вдоль
- 20. Метод Ньютона Если функция дважды дифференцируема, то ее можно разложить в ряд Тейлора в окрестности точки
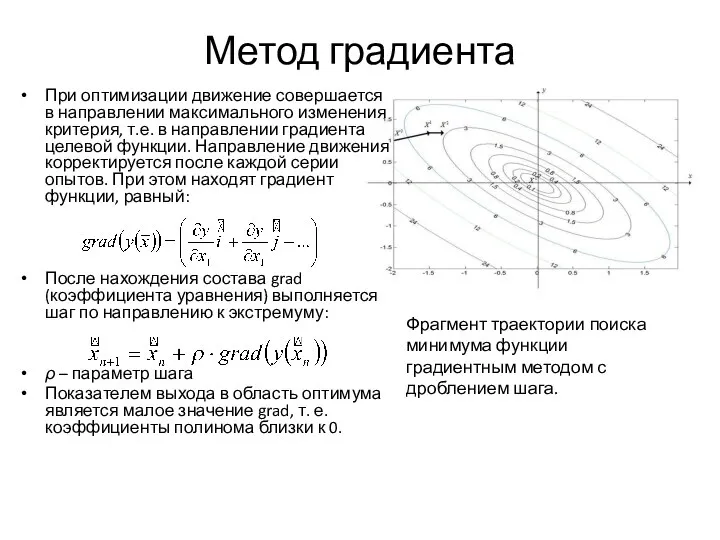
- 21. Метод градиента При оптимизации движение совершается в направлении максимального изменения критерия, т.е. в направлении градиента целевой
- 22. Метод крутого восхождения Бокса-Уилсона Крутое восхождение по поверхности отклика –ставят эксперимент для нахождения уравнения Находят базовый
- 23. Метод ветвей и границ На каждом шаге метода элементы разбиения (подмножества) подвергаются анализу – содержит ли
- 24. Теория графов Найти кратчайшие пути в орграфе от первой вершины ко всем остальным, используя алгоритм Дейкстры.
- 25. Графический метод решения задачи линейного программирования
- 27. Скачать презентацию
Оптимизация
При поиске экстремальной точки осуществляется локальное изучение поверхности отклика. Экстремальное значение
Оптимизация
При поиске экстремальной точки осуществляется локальное изучение поверхности отклика. Экстремальное значение
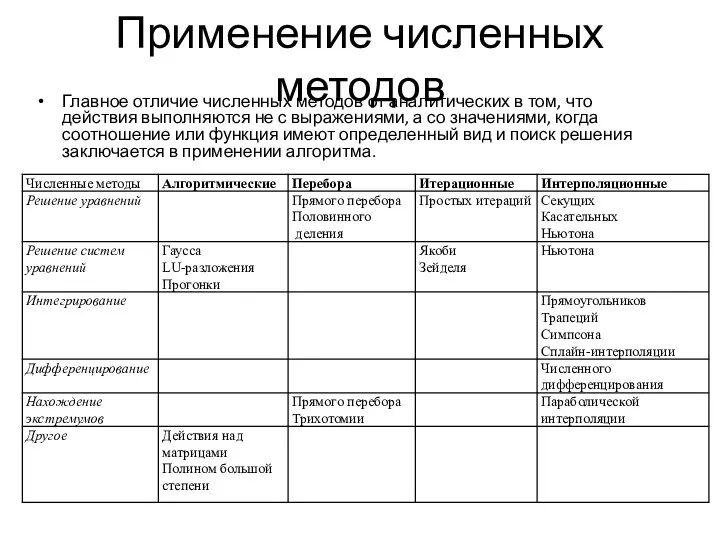
Применение численных методов
Главное отличие численных методов от аналитических в том, что
Применение численных методов
Главное отличие численных методов от аналитических в том, что
ОПТИМИЗАЦИЯ ОДНОФАКТОРНЫХ ОБЪЕКТОВ.
ОПТИМИЗАЦИЯ ОДНОФАКТОРНЫХ ОБЪЕКТОВ.
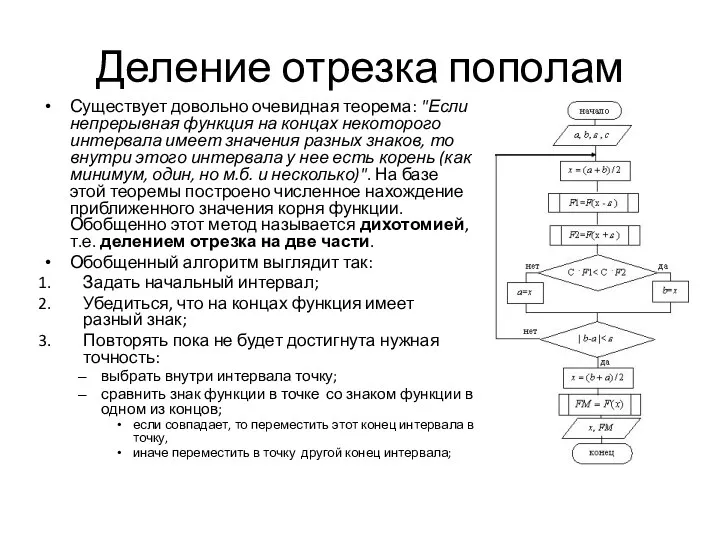
Деление отрезка пополам
Существует довольно очевидная теорема: "Если непрерывная функция на концах
Деление отрезка пополам
Существует довольно очевидная теорема: "Если непрерывная функция на концах
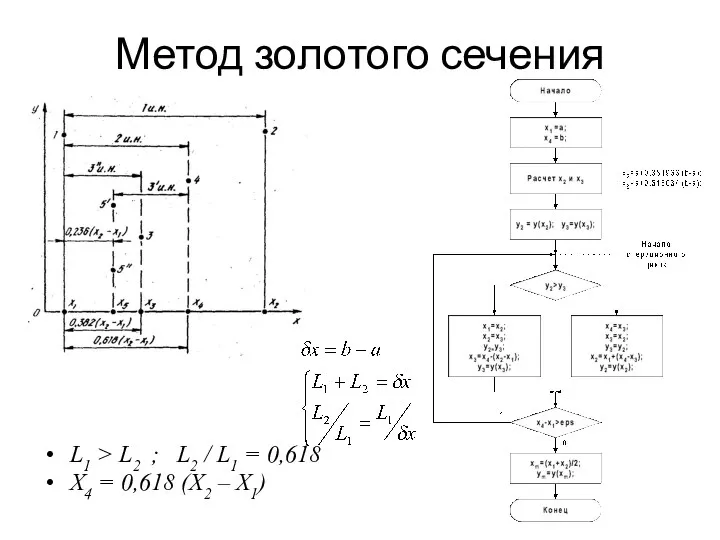
Метод золотого сечения
L1 > L2 ; L2 / L1 = 0,618
Х4
Метод золотого сечения
L1 > L2 ; L2 / L1 = 0,618
Х4
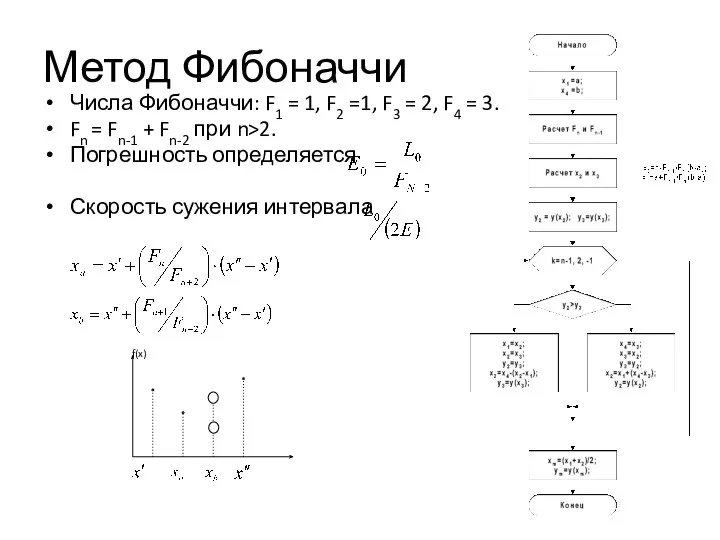
Метод Фибоначчи
Числа Фибоначчи: F1 = 1, F2 =1, F3 = 2,
Метод Фибоначчи
Числа Фибоначчи: F1 = 1, F2 =1, F3 = 2,
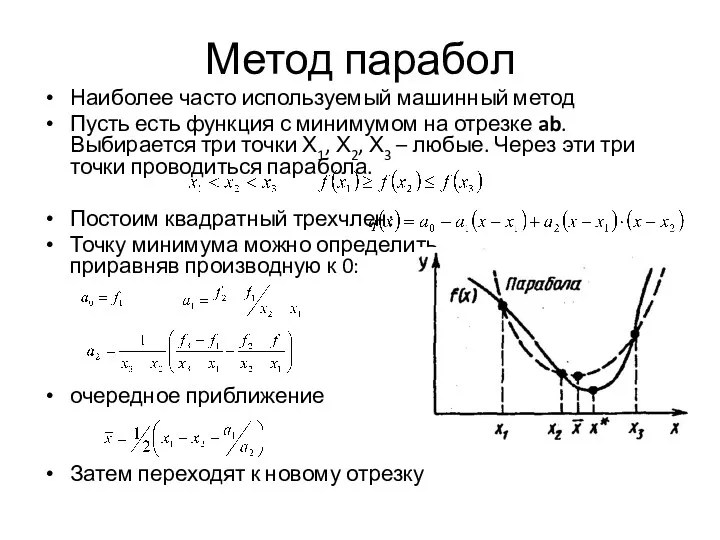
Метод парабол
Наиболее часто используемый машинный метод
Пусть есть функция с минимумом на
Метод парабол
Наиболее часто используемый машинный метод
Пусть есть функция с минимумом на
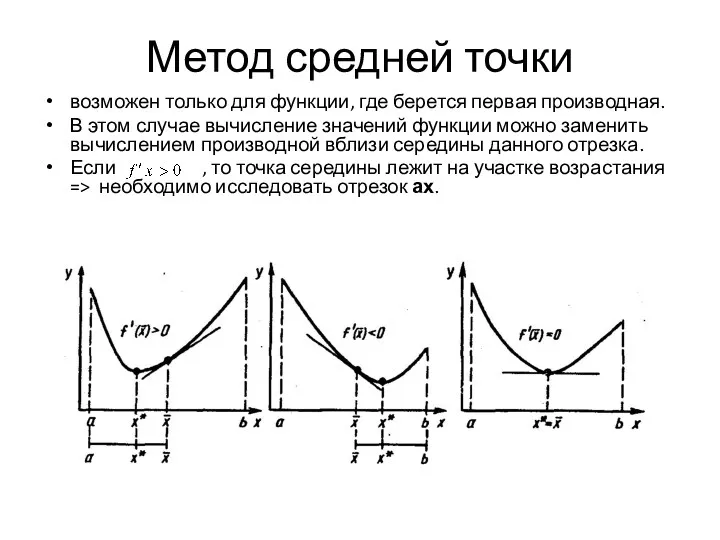
Метод средней точки
возможен только для функции, где берется первая производная.
В
Метод средней точки
возможен только для функции, где берется первая производная.
В

Метод Хорд
Если на отрезке ab производная имеет разные знаки
то обязательно найдется
Метод Хорд
Если на отрезке ab производная имеет разные знаки
то обязательно найдется
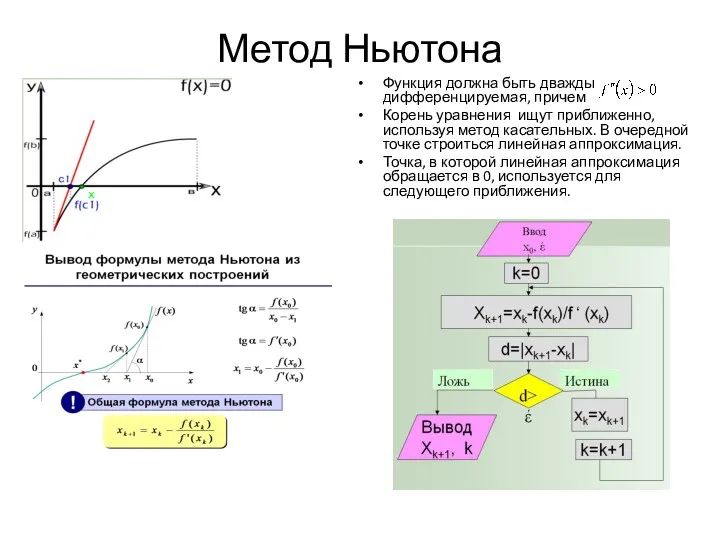
Метод Ньютона
Функция должна быть дважды дифференцируемая, причем
Корень уравнения ищут приближенно, используя
Метод Ньютона
Функция должна быть дважды дифференцируемая, причем
Корень уравнения ищут приближенно, используя

Метод перебора
(для многомодульных
функций)
Разбиение отрезков на равные части и проверка
Метод перебора
(для многомодульных
функций)
Разбиение отрезков на равные части и проверка
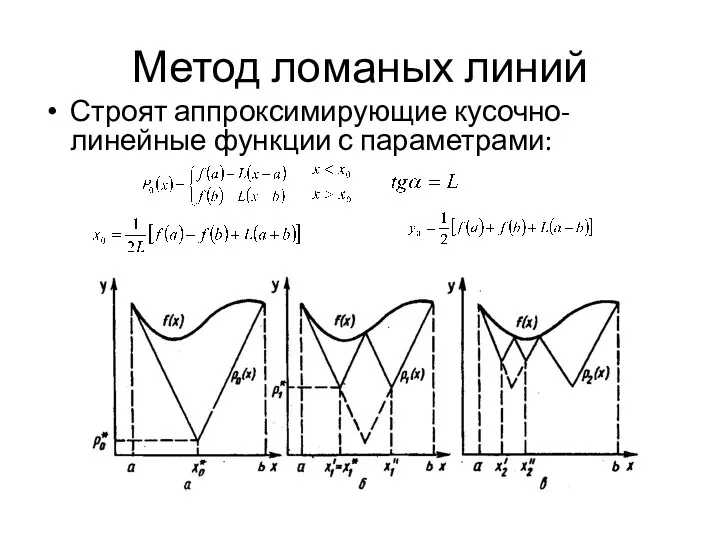
Метод ломаных линий
Строят аппроксимирующие кусочно-линейные функции с параметрами:
Метод ломаных линий
Строят аппроксимирующие кусочно-линейные функции с параметрами:
Оптимизация многофакторных объектов
Оптимизация многофакторных объектов

Графическая интерпретация задачи
Принцип многофакторности отражает новый подход к эксперименту в
Графическая интерпретация задачи
Принцип многофакторности отражает новый подход к эксперименту в
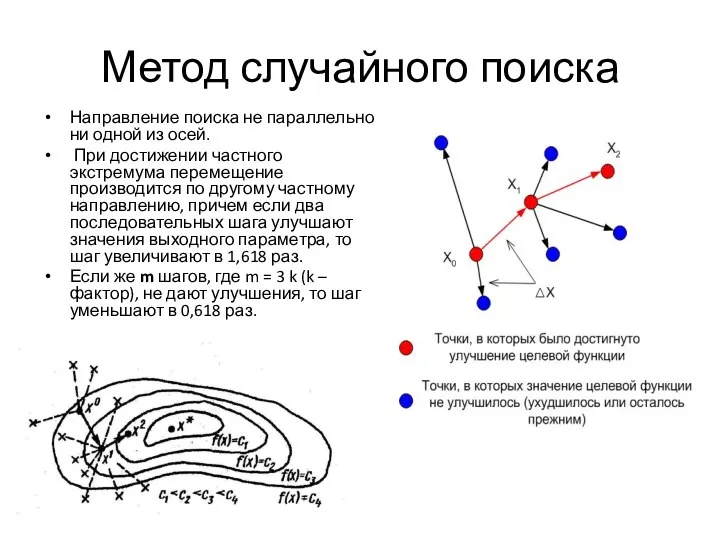
Метод случайного поиска
Направление поиска не параллельно ни одной из осей.
При
Метод случайного поиска
Направление поиска не параллельно ни одной из осей.
При
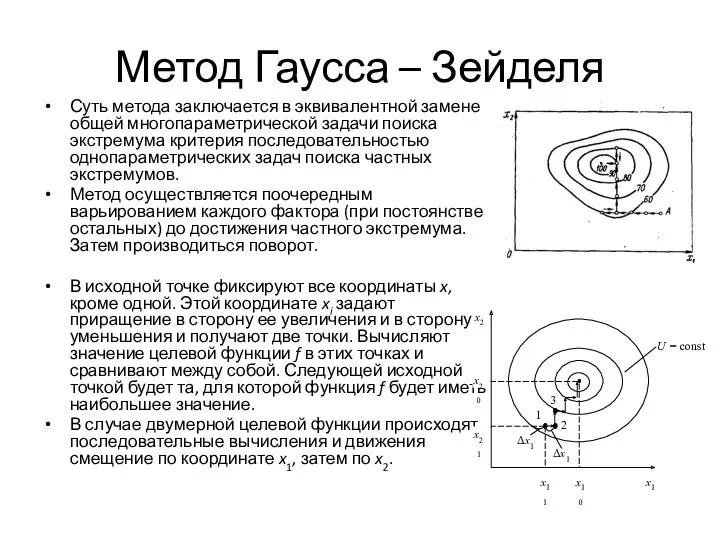
Метод Гаусса – Зейделя
Суть метода заключается в эквивалентной замене общей многопараметрической
Метод Гаусса – Зейделя
Суть метода заключается в эквивалентной замене общей многопараметрической

Метод Хука – Дживса
Исследуют покоординатный спуск в окрестностях данной точки и
Метод Хука – Дживса
Исследуют покоординатный спуск в окрестностях данной точки и
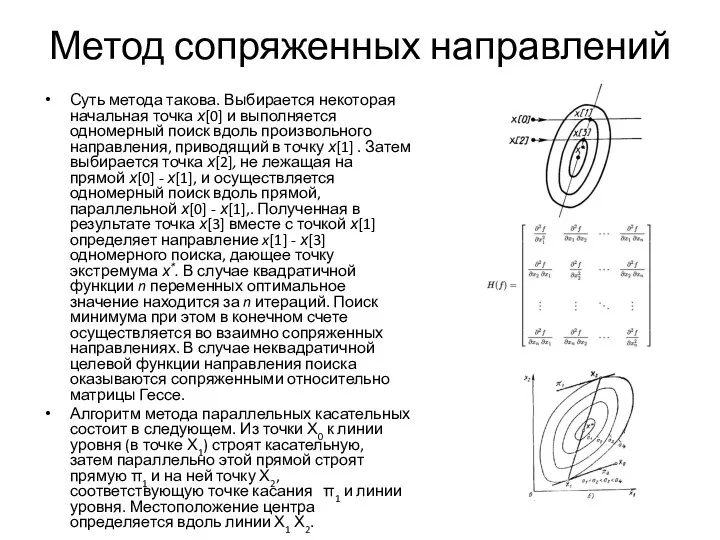
Метод сопряженных направлений
Суть метода такова. Выбирается некоторая начальная точка х[0] и выполняется
Метод сопряженных направлений
Суть метода такова. Выбирается некоторая начальная точка х[0] и выполняется
Метод Ньютона
Если функция дважды дифференцируема, то ее можно разложить в ряд
Метод Ньютона
Если функция дважды дифференцируема, то ее можно разложить в ряд
Метод градиента
При оптимизации движение совершается в направлении максимального изменения критерия, т.е.
Метод градиента
При оптимизации движение совершается в направлении максимального изменения критерия, т.е.
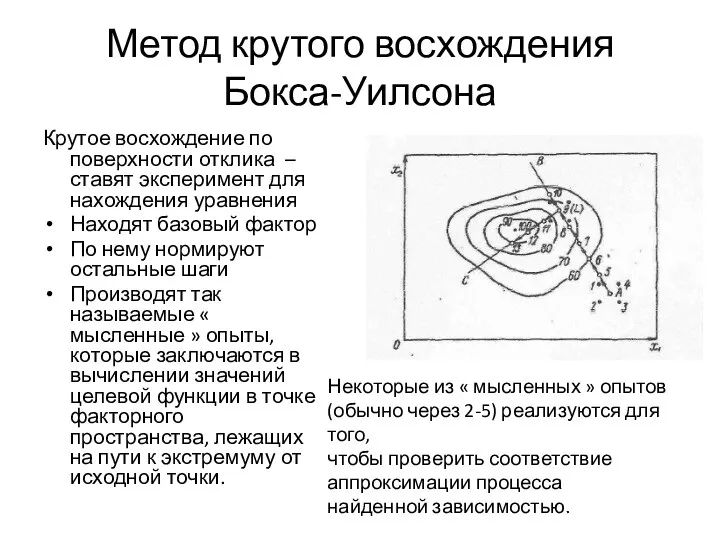
Метод крутого восхождения Бокса-Уилсона
Крутое восхождение по поверхности отклика –ставят эксперимент для
Метод крутого восхождения Бокса-Уилсона
Крутое восхождение по поверхности отклика –ставят эксперимент для

Метод ветвей и границ
На каждом шаге метода элементы разбиения (подмножества) подвергаются
Метод ветвей и границ
На каждом шаге метода элементы разбиения (подмножества) подвергаются

Теория графов
Найти кратчайшие пути в орграфе от первой вершины ко всем
Теория графов
Найти кратчайшие пути в орграфе от первой вершины ко всем
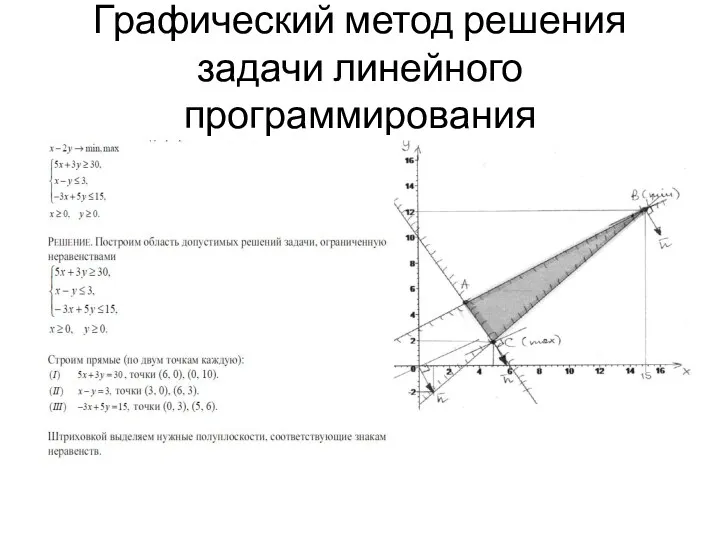
Графический метод решения задачи линейного программирования
Графический метод решения задачи линейного программирования
 Тема. Деление на круглое число.
Тема. Деление на круглое число. Задачи на уменьшение числа в несколько раз. 3 класс
Задачи на уменьшение числа в несколько раз. 3 класс Презентация: Шар. Порядковый счет до 3
Презентация: Шар. Порядковый счет до 3 Транспортная задача
Транспортная задача Геометрия. Задания ОГЭ
Геометрия. Задания ОГЭ Метр 2 класс
Метр 2 класс Презентация по теме Решение задач на движение 3 класс
Презентация по теме Решение задач на движение 3 класс Вартість. Гривня і копійка. Дії з іменованими числами. Урок №101
Вартість. Гривня і копійка. Дії з іменованими числами. Урок №101 Решение экономических задач в новой версии ЕГЭ
Решение экономических задач в новой версии ЕГЭ Степенева функція
Степенева функція Урок математики в 4 классе Решение задач. Когда количество одинаковое ПНШ
Урок математики в 4 классе Решение задач. Когда количество одинаковое ПНШ Изображение на координатной плоскости множества решений уравнений и неравенств с двумя переменными и их систем
Изображение на координатной плоскости множества решений уравнений и неравенств с двумя переменными и их систем Упрощение логических выражений
Упрощение логических выражений класс геометрия повторение. Четырёх
класс геометрия повторение. Четырёх Способы решений систем линейных уравнений
Способы решений систем линейных уравнений Деление на десятичную дробь
Деление на десятичную дробь Числові множини. Ірраціональні та дійсні числа
Числові множини. Ірраціональні та дійсні числа Математическая игра Брейн-ринг. 6 класс
Математическая игра Брейн-ринг. 6 класс Неравенства с двумя переменными. 9 класс
Неравенства с двумя переменными. 9 класс Игра для учащихся Математический активизатор
Игра для учащихся Математический активизатор 20231019_lektsiya1.vektory_i_deystviya_nad_nimi_1
20231019_lektsiya1.vektory_i_deystviya_nad_nimi_1 Первообразная. Неопределенный интеграл
Первообразная. Неопределенный интеграл Неопределенный интеграл. (Лекция 1)
Неопределенный интеграл. (Лекция 1) Правильная треугольная пирамида
Правильная треугольная пирамида презентация проекта Развитие у детей чувства времени
презентация проекта Развитие у детей чувства времени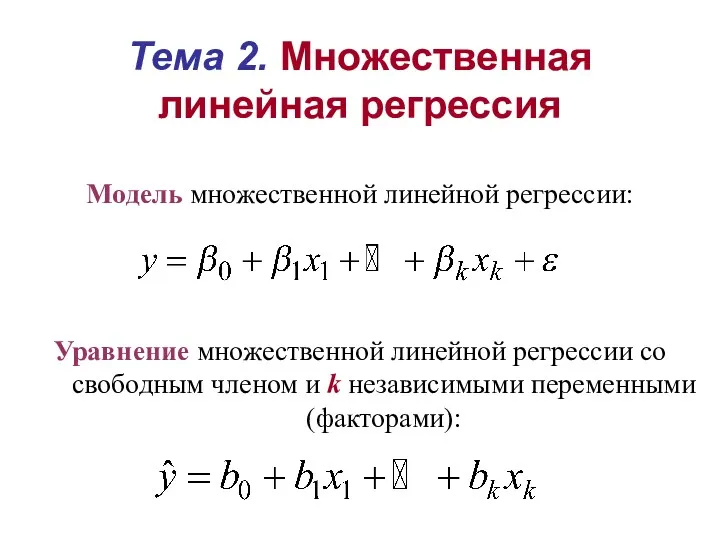 Множественная линейная регрессия
Множественная линейная регрессия Связь между слагаемым и суммой
Связь между слагаемым и суммой Рациональные уравнения. ЕГЭ. Задание 5
Рациональные уравнения. ЕГЭ. Задание 5