- Оптимальное планирование эксперимента

Содержание
- 2. Литература Н.А. Спирин, В.В. Лавров. Методы планирования и обработки инженерного эксперимента: Конспект лекций. Под общ. Ред.
- 3. Цель планирования эксперимента нахождение таких условий и правил проведения опытов при которых удается получить надежную и
- 4. Вводные понятия Эксперимент – система операций, воздействий и (или) наблюдений, направленных на получений информации об исследуемом
- 5. Краткая классификация экспериментов
- 6. Функция отклика - это зависимость математического ожидания отклика от факторов [1]
- 7. Активный эксперимент Основная задача – определить коэффициенты функции отклика Уравнение (*), используется для описания функции отклика
- 8. Последовательность проведения активного эксперимента Разрабатывается схема проведения исследований, т.е. выполняется планирование эксперимента Осуществляется реализация опыта по
- 9. Планирование активного эксперимента При планировании экспериментов чаще всего применяются планы 1-ого и 2-ого порядков. Планы более
- 10. Планирование первого порядка В качестве факторов выбираются только контролируемые и управляемые факторы (переменные) Обеспечивается возможность независимого
- 11. Представления плана эксперимента (на примере эксперимента с 3-мя независимыми факторами) Табличное (матричное) представление Геометрическое представление Уравнением
- 12. Свойства матрицы представления эксперимента 1. Свойство симметричности – алгебраическая сумма элементов вектор-столбца каждого фактора равна нулю
- 13. Определение коэффициентов b уравнения регрессии По свойствам матрицы планирования Методом наименьших квадратов находятся оценки b коэффициентов
- 14. Планирование второго порядка Применяется если описание функции отклика первым порядком получается недостаточным (например, процесс носит нелинейный
- 15. Ортогональный план Ортогональный план 2-ого порядка Это план 2-ого порядка после преобразований (*) Эти преобразования позволяют
- 17. Скачать презентацию
Литература
Н.А. Спирин, В.В. Лавров. Методы планирования и обработки инженерного эксперимента: Конспект
Литература
Н.А. Спирин, В.В. Лавров. Методы планирования и обработки инженерного эксперимента: Конспект
Цель планирования эксперимента
нахождение таких условий и правил проведения опытов при которых
Цель планирования эксперимента
нахождение таких условий и правил проведения опытов при которых
Вводные понятия
Эксперимент – система операций, воздействий и (или) наблюдений, направленных на
Вводные понятия
Эксперимент – система операций, воздействий и (или) наблюдений, направленных на
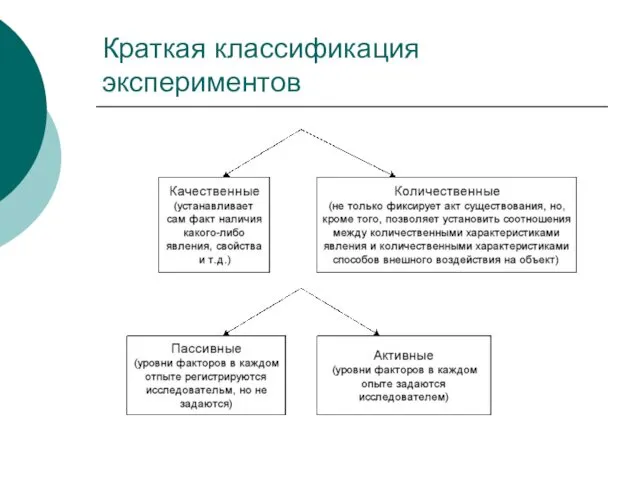
Краткая классификация экспериментов
Краткая классификация экспериментов
![Функция отклика - это зависимость математического ожидания отклика от факторов [1]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/106263/slide-5.jpg)
Функция отклика
- это зависимость математического ожидания отклика от факторов [1]
Функция отклика
- это зависимость математического ожидания отклика от факторов [1]
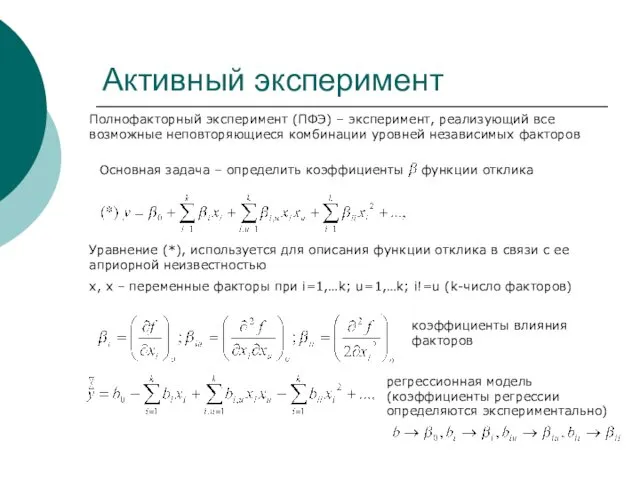
Активный эксперимент
Основная задача – определить коэффициенты функции отклика
Уравнение (*), используется
Активный эксперимент
Основная задача – определить коэффициенты функции отклика
Уравнение (*), используется
Последовательность проведения активного эксперимента
Разрабатывается схема проведения исследований, т.е. выполняется планирование эксперимента
Осуществляется
Последовательность проведения активного эксперимента
Разрабатывается схема проведения исследований, т.е. выполняется планирование эксперимента
Осуществляется
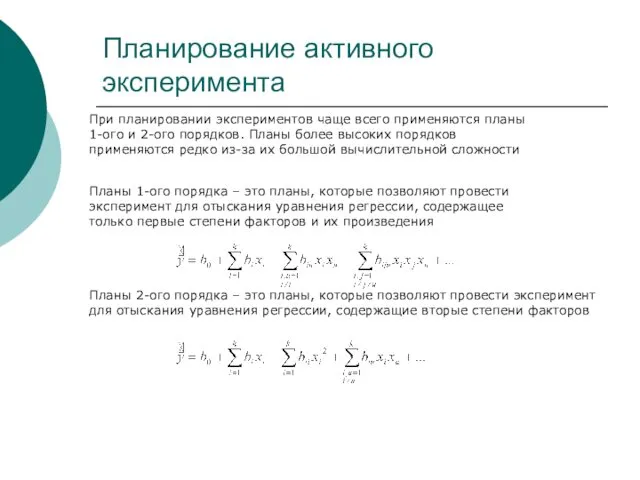
Планирование активного эксперимента
При планировании экспериментов чаще всего применяются планы 1-ого и
Планирование активного эксперимента
При планировании экспериментов чаще всего применяются планы 1-ого и
Планирование первого порядка
В качестве факторов выбираются только контролируемые и управляемые факторы
Планирование первого порядка
В качестве факторов выбираются только контролируемые и управляемые факторы
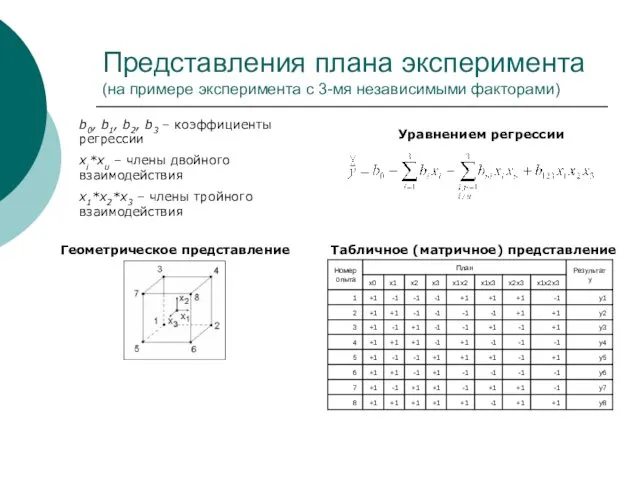
Представления плана эксперимента
(на примере эксперимента с 3-мя независимыми факторами)
Табличное (матричное) представление
Геометрическое
Представления плана эксперимента
(на примере эксперимента с 3-мя независимыми факторами)
Табличное (матричное) представление
Геометрическое
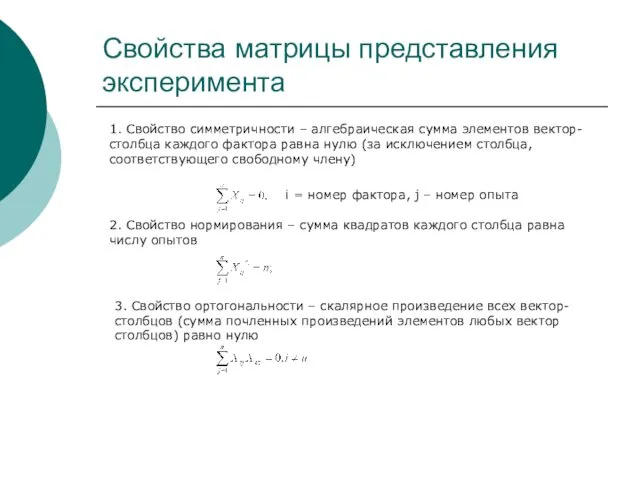
Свойства матрицы представления эксперимента
1. Свойство симметричности – алгебраическая сумма элементов вектор-столбца
Свойства матрицы представления эксперимента
1. Свойство симметричности – алгебраическая сумма элементов вектор-столбца
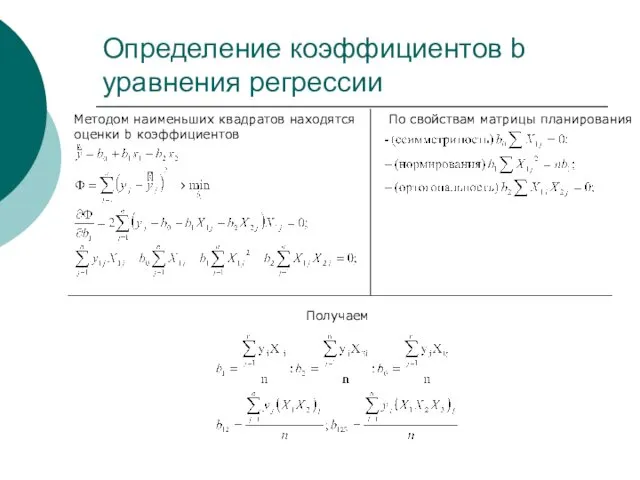
Определение коэффициентов b уравнения регрессии
По свойствам матрицы планирования
Методом наименьших квадратов находятся
Определение коэффициентов b уравнения регрессии
По свойствам матрицы планирования
Методом наименьших квадратов находятся
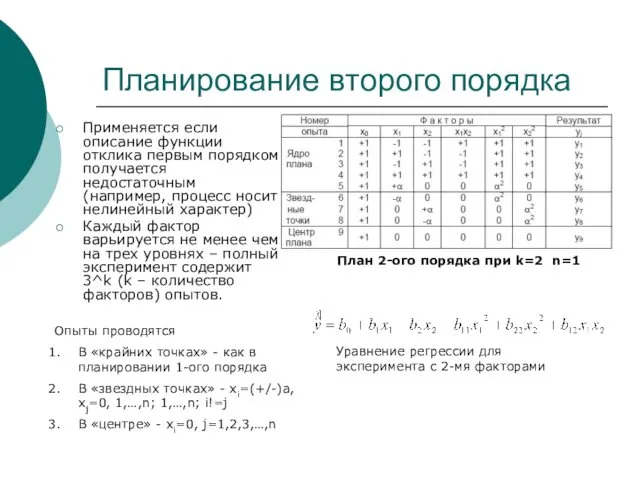
Планирование второго порядка
Применяется если описание функции отклика первым порядком получается недостаточным
Планирование второго порядка
Применяется если описание функции отклика первым порядком получается недостаточным

Ортогональный план
Ортогональный план 2-ого порядка
Это план 2-ого порядка после преобразований (*)
Эти
Ортогональный план
Ортогональный план 2-ого порядка
Это план 2-ого порядка после преобразований (*)
Эти
 Способы решения уравнений. Графический способ
Способы решения уравнений. Графический способ Координатный луч. 5 класс
Координатный луч. 5 класс Алгебраические дроби, сокращение дробей
Алгебраические дроби, сокращение дробей Наглядное представление статистической информации - диаграмма
Наглядное представление статистической информации - диаграмма The travelling salesman problem
The travelling salesman problem Геометрия и мода
Геометрия и мода Игровой тренажер Страна смешариков
Игровой тренажер Страна смешариков Сложение и вычитание смешанных чисел
Сложение и вычитание смешанных чисел Сетевые задачи дискретной математики. Тема 5
Сетевые задачи дискретной математики. Тема 5 Правильные многогранники
Правильные многогранники Сложение и вычитание векторов
Сложение и вычитание векторов Комбинаторика
Комбинаторика Мозговой штурм Диск
Мозговой штурм Диск Метрология. Научные изыскания в области метрологии
Метрология. Научные изыскания в области метрологии Сызықты алгебралық теңдеулер жүйелерін шешудің дәл әдістері
Сызықты алгебралық теңдеулер жүйелерін шешудің дәл әдістері Математические основы информатики
Математические основы информатики Урок по математике во 2 классе по теме Приёмы вычислений для случаев вида 26+7, 35-7. Закрепление.
Урок по математике во 2 классе по теме Приёмы вычислений для случаев вида 26+7, 35-7. Закрепление. Презентация математика в картинках
Презентация математика в картинках Введение в комбинаторику
Введение в комбинаторику Тригонометрические формулы
Тригонометрические формулы тренажёр по теме Таблица умножения
тренажёр по теме Таблица умножения Геометрический и физический смысл производной
Геометрический и физический смысл производной Интеллектуальная игра по математике
Интеллектуальная игра по математике Весёлая математика
Весёлая математика Медианы, биссектрисы и высоты треугольника
Медианы, биссектрисы и высоты треугольника Тренажёр Таблица умножения
Тренажёр Таблица умножения Диференціальне числення. Визначення функції ( лекція 1.1)
Диференціальне числення. Визначення функції ( лекція 1.1) Интегральные исчисления
Интегральные исчисления