- Применение систем нечеткой логики

Содержание
- 2. Идентификация систем 1. Идентификация структуры. Очень сложный и трудоемкий процесс, крайне чувствительный к выбору начальных условий,
- 3. Идентификация структуры Традиционный подход: а) из большого количества переменных выбрать входную и выходную величины, пользуясь методами
- 4. Идентификация структуры При этом термы функций принадлежности фактически разбивают все пространство входных значений на некоторые области,
- 5. Идентификация структуры Таким образом, на первом этапе идентификации структуры с помощью нечеткой логики выполняются следующие действия:
- 6. Идентификация параметров Классический подход заключается в нахождении неизвестных коэффициентов функции, описывающей поведение системы, например: С точки
- 7. Параметризация функций принадлежности Параметризация функций принадлежности – задание их формы с помощью неизвестных точно переменных, которые
- 8. Параметризация функций принадлежности Треугольная: Трапецеидальная: Гауссова Колоколообразная:
- 9. Нечеткий регулятор Нечеткая логика применяется для построения систем регулирования объектами с явно выраженной нелинейностью и (или)
- 10. Нечеткий регулятор Методы создания регулятора: 1. Экспертные знания – реализация известного алгоритма управления на основании опыта
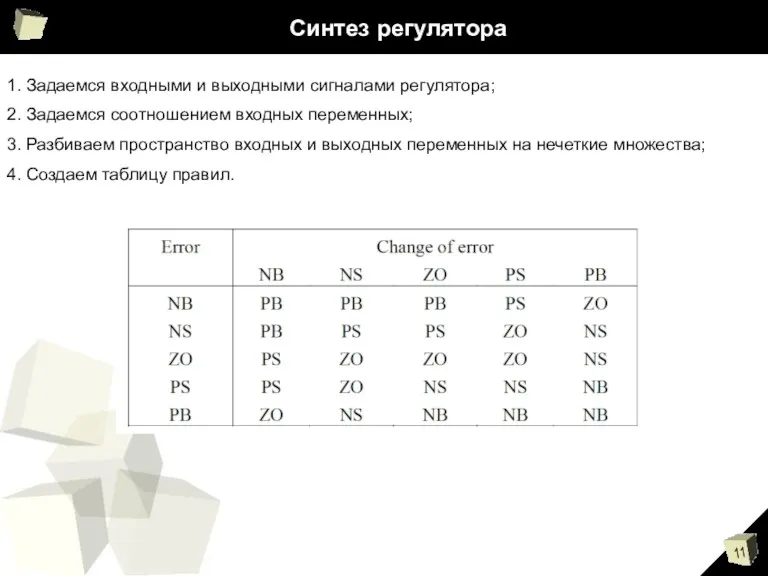
- 11. Синтез регулятора 1. Задаемся входными и выходными сигналами регулятора; 2. Задаемся соотношением входных переменных; 3. Разбиваем
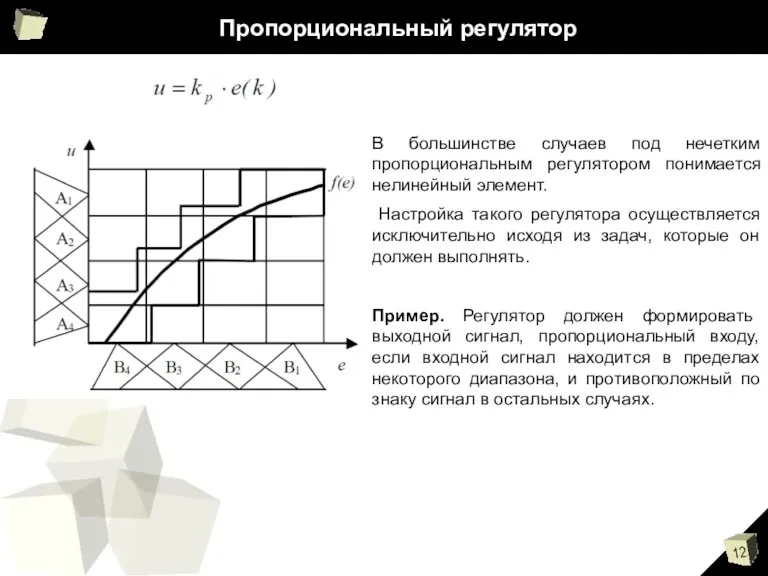
- 12. Пропорциональный регулятор В большинстве случаев под нечетким пропорциональным регулятором понимается нелинейный элемент. Настройка такого регулятора осуществляется
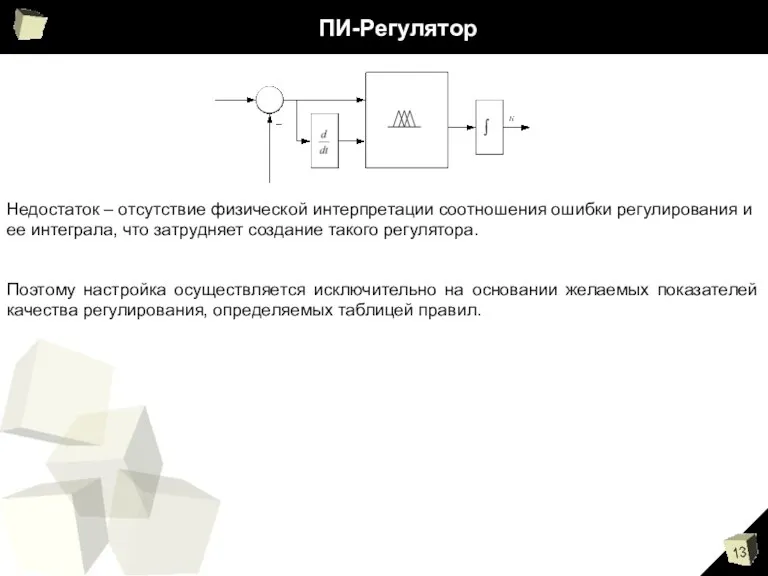
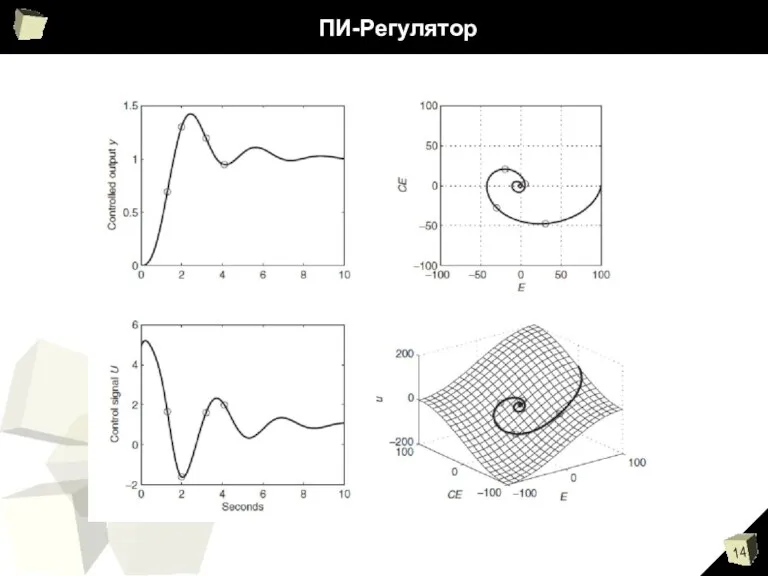
- 13. ПИ-Регулятор Недостаток – отсутствие физической интерпретации соотношения ошибки регулирования и ее интеграла, что затрудняет создание такого
- 14. ПИ-Регулятор
- 16. Скачать презентацию
Идентификация систем
1. Идентификация структуры.
Очень сложный и трудоемкий процесс, крайне чувствительный
Идентификация систем
1. Идентификация структуры.
Очень сложный и трудоемкий процесс, крайне чувствительный
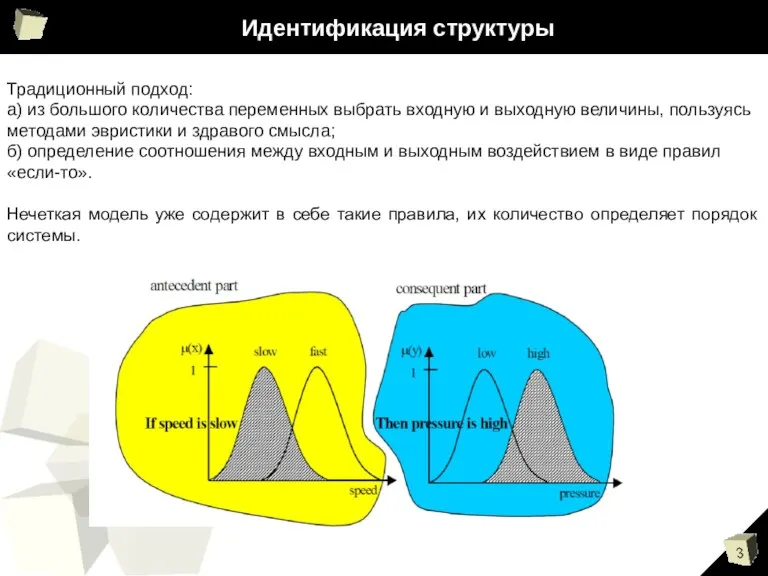
Идентификация структуры
Традиционный подход:
а) из большого количества переменных выбрать входную и выходную
Идентификация структуры
Традиционный подход:
а) из большого количества переменных выбрать входную и выходную
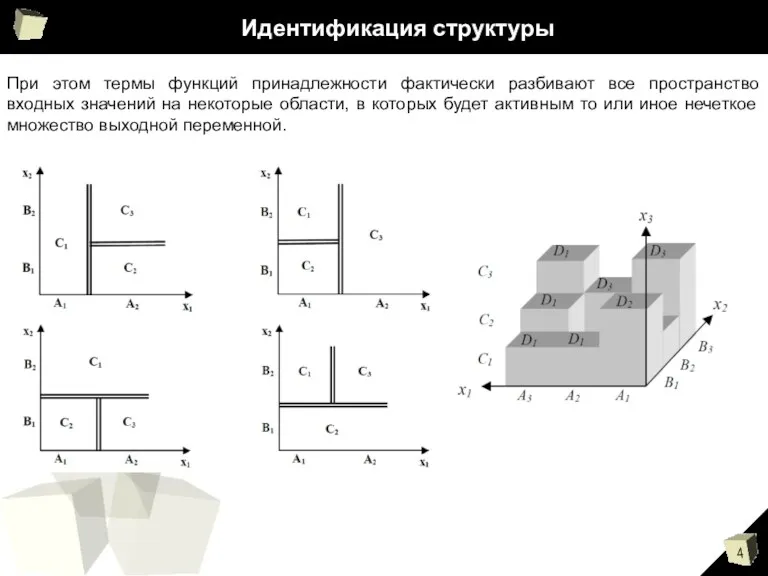
Идентификация структуры
При этом термы функций принадлежности фактически разбивают все пространство входных
Идентификация структуры
При этом термы функций принадлежности фактически разбивают все пространство входных
Идентификация структуры
Таким образом, на первом этапе идентификации структуры с помощью нечеткой
Идентификация структуры
Таким образом, на первом этапе идентификации структуры с помощью нечеткой
Идентификация параметров
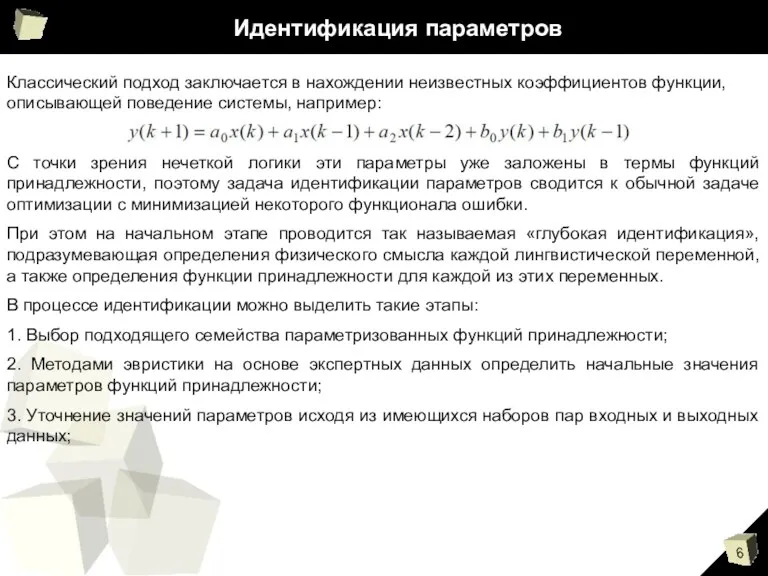
Классический подход заключается в нахождении неизвестных коэффициентов функции, описывающей поведение
Идентификация параметров
Классический подход заключается в нахождении неизвестных коэффициентов функции, описывающей поведение
Параметризация функций принадлежности
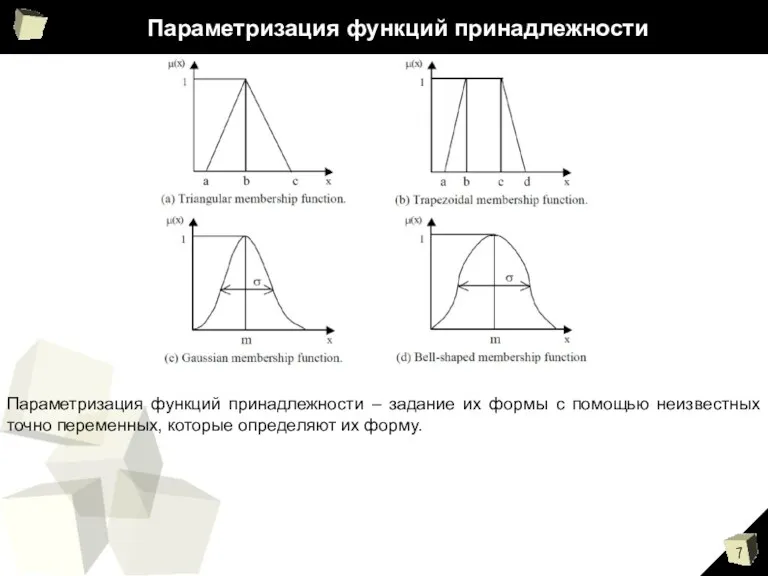
Параметризация функций принадлежности – задание их формы с помощью
Параметризация функций принадлежности
Параметризация функций принадлежности – задание их формы с помощью
Параметризация функций принадлежности
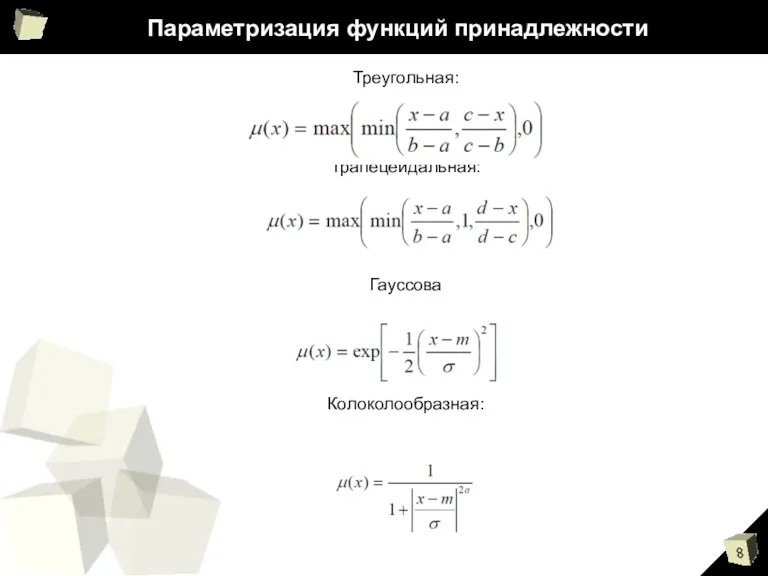
Треугольная:
Трапецеидальная:
Гауссова
Колоколообразная:
Параметризация функций принадлежности
Треугольная:
Трапецеидальная:
Гауссова
Колоколообразная:
Нечеткий регулятор
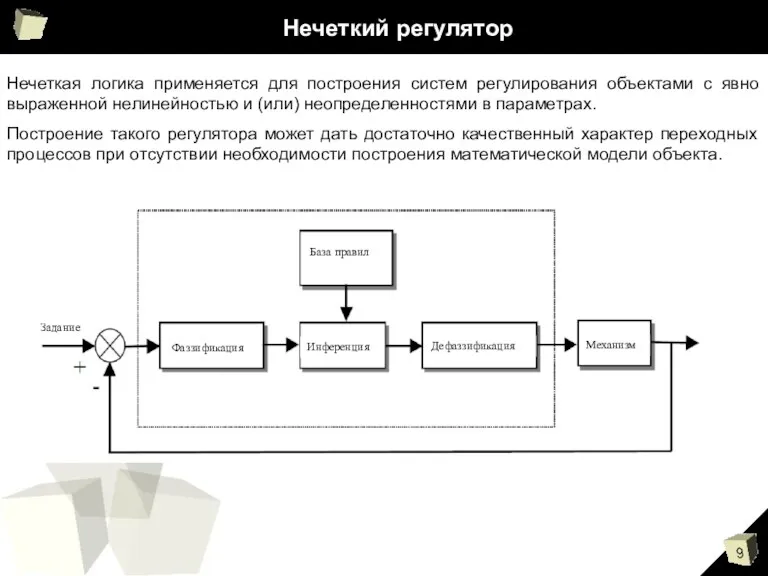
Нечеткая логика применяется для построения систем регулирования объектами с явно
Нечеткий регулятор
Нечеткая логика применяется для построения систем регулирования объектами с явно
Нечеткий регулятор
Методы создания регулятора:
1. Экспертные знания – реализация известного алгоритма управления
Нечеткий регулятор
Методы создания регулятора:
1. Экспертные знания – реализация известного алгоритма управления
Синтез регулятора
1. Задаемся входными и выходными сигналами регулятора;
2. Задаемся соотношением входных
Синтез регулятора
1. Задаемся входными и выходными сигналами регулятора;
2. Задаемся соотношением входных
Пропорциональный регулятор
В большинстве случаев под нечетким пропорциональным регулятором понимается нелинейный элемент.
Пропорциональный регулятор
В большинстве случаев под нечетким пропорциональным регулятором понимается нелинейный элемент.
ПИ-Регулятор
Недостаток – отсутствие физической интерпретации соотношения ошибки регулирования и ее интеграла,
ПИ-Регулятор
Недостаток – отсутствие физической интерпретации соотношения ошибки регулирования и ее интеграла,
ПИ-Регулятор
ПИ-Регулятор
 Геометрические тела и их изображения
Геометрические тела и их изображения Решение неравенств с одной переменной
Решение неравенств с одной переменной Случаи деления вида 80:20
Случаи деления вида 80:20 Интегрированный урок английского языка и математики в 5 классе
Интегрированный урок английского языка и математики в 5 классе Упражнения для устного счета, 9 класс
Упражнения для устного счета, 9 класс Математика. 1 класс. Урок 22. Целое и части - Презентация
Математика. 1 класс. Урок 22. Целое и части - Презентация Правильные многоугольники
Правильные многоугольники Умножение. Свойства умножения
Умножение. Свойства умножения Многогранники
Многогранники Игры по математике
Игры по математике Построение треугольника по трем элементам
Построение треугольника по трем элементам Математическая игра Брейн-ринг. 6 класс
Математическая игра Брейн-ринг. 6 класс Способы нахождения наибольшего общего делителя и наименьшего общего кратного натуральных чисел
Способы нахождения наибольшего общего делителя и наименьшего общего кратного натуральных чисел Свойства логарифмов
Свойства логарифмов Область и границы
Область и границы Измерение геометрических величин
Измерение геометрических величин Умники и умницы. Игра Кто самый внимательный?
Умники и умницы. Игра Кто самый внимательный? Компьютерный практикум по алгебре в среде Matlab. Практическое занятие 7
Компьютерный практикум по алгебре в среде Matlab. Практическое занятие 7 Признаки параллельности двух прямых
Признаки параллельности двух прямых Десяткові дроби
Десяткові дроби Основы технических измерений
Основы технических измерений Задачи на чертежах по теме трапеция
Задачи на чертежах по теме трапеция Игра Поле математических чудес.
Игра Поле математических чудес. Обобщающий урок по теме Площадь
Обобщающий урок по теме Площадь Правильные многогранники. (11 класс)
Правильные многогранники. (11 класс) Умножение чисел с разными знаками
Умножение чисел с разными знаками Земная кора. Сложение и вычитание десятичных дробей
Земная кора. Сложение и вычитание десятичных дробей Как называются квадратные уравнения, если а=1?
Как называются квадратные уравнения, если а=1?