- Suboptimal control in the stochastic nonlinear dynamic systems

Содержание
- 2. Objective. Development of a method for solving task of suboptimal control in stochastic nonlinear dynamical systems.
- 3. The optimization problem for linear stochastic control systems is reduced to two successive steps: 1. Optimal
- 4. In accordance with the principle of separation, the problem of synthesizing a stochastic linear optimal control
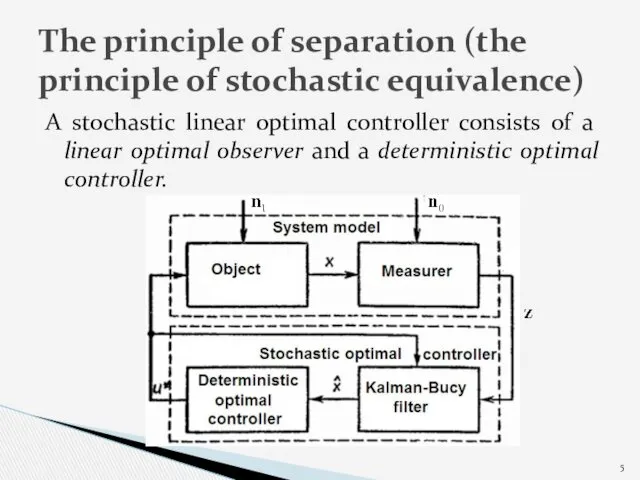
- 5. A stochastic linear optimal controller consists of a linear optimal observer and a deterministic optimal controller.
- 6. For nonlinear stochastic control systems, the separation principle is not always possible, since it has not
- 7. Spline is a function that is an algebraic polynomial on every partial interval of interpolation, and
- 8. The linear spline is described by the following equation: where the coefficients can be found by
- 9. Spline approximation of a nonlinear function Figure 1. Representation of a function by linear spline .
- 10. Let the control of the object and measurement models be described by stochastic differential equations: where
- 11. With the approximation by splines of the expression (1) takes the form: Nonlinear stochastic control systems
- 12. We denote by Suppose that at the control at time t information about all observations on
- 13. Functional of quality of control It is required to find a control from the set of
- 14. Statement. Suboptimal control in the task (1) with the criterion of quality (3) has the form:
- 15. - symmetric matrix of the gain factors of the optimal controller, - matrix of the gain
- 16. The system of equations on slide 14 is the Kalman-Bucy equation in the representation of a
- 17. The state of the system and its estimate obtained with the linear spline: Results of simulation
- 18. 1. The use of splines allows one to solve problems in nonlinear stochastic control systems (NSCS)
- 20. Скачать презентацию
Objective. Development of a method for solving task of suboptimal control
Objective. Development of a method for solving task of suboptimal control
The optimization problem for linear stochastic control systems is reduced to
In accordance with the principle of separation, the problem of synthesizing
In accordance with the principle of separation, the problem of synthesizing
A stochastic linear optimal controller consists of a linear optimal observer
A stochastic linear optimal controller consists of a linear optimal observer
For nonlinear stochastic control systems, the separation principle is not always
For nonlinear stochastic control systems, the separation principle is not always
Spline is a function that is an algebraic polynomial on every
Spline is a function that is an algebraic polynomial on every
The linear spline is described by the following equation:
where the coefficients
The linear spline is described by the following equation:
where the coefficients
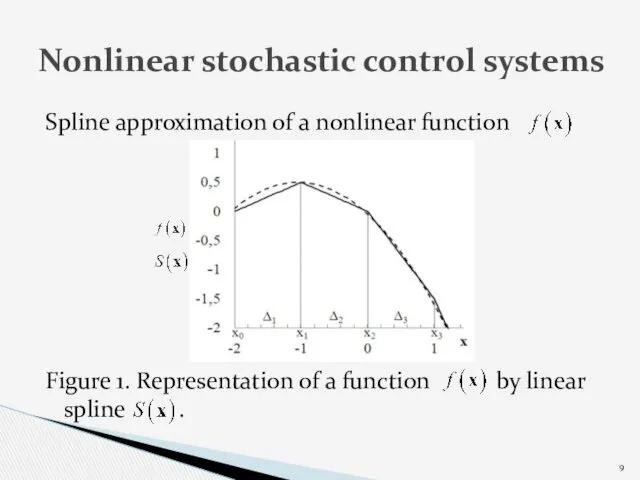
Spline approximation of a nonlinear function
Figure 1. Representation of a function
Spline approximation of a nonlinear function
Figure 1. Representation of a function
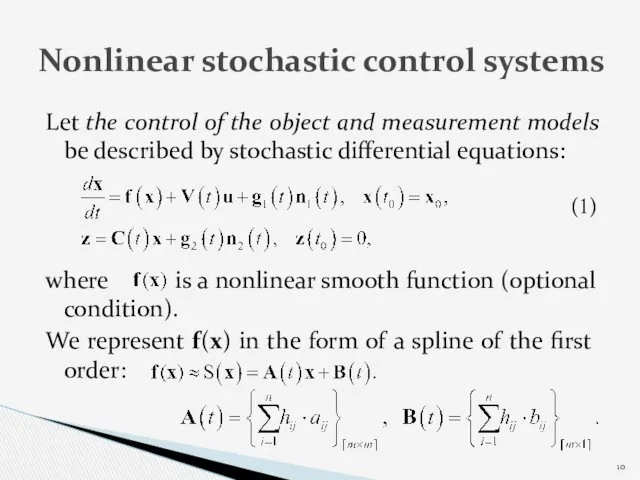
Let the control of the object and measurement models be described
Let the control of the object and measurement models be described
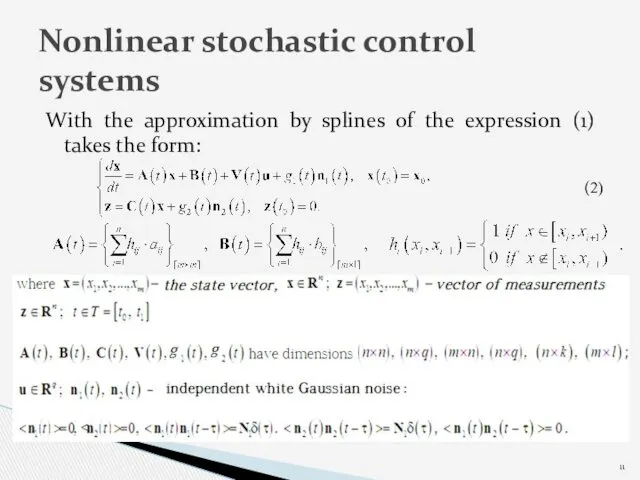
With the approximation by splines of the expression (1) takes the
With the approximation by splines of the expression (1) takes the
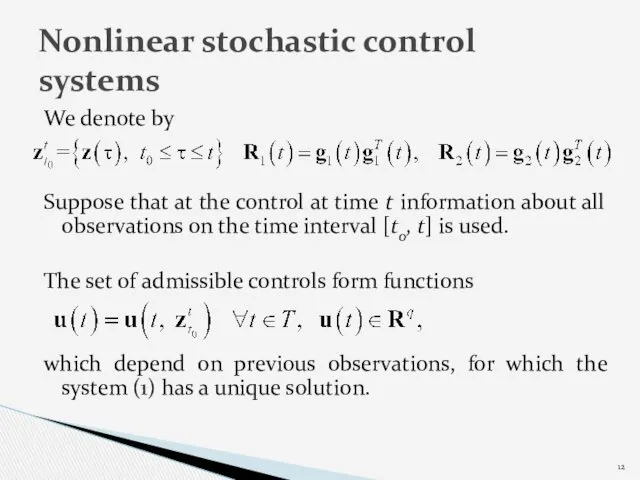
We denote by
Suppose that at the control at time t information
We denote by
Suppose that at the control at time t information
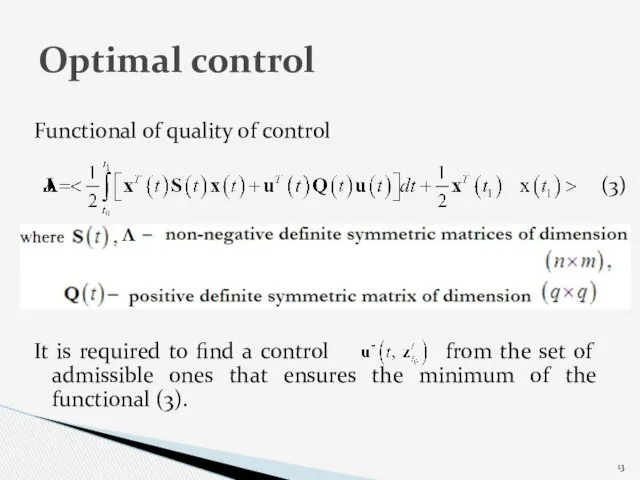
Functional of quality of control
It is required to find a control
It is required to find a control
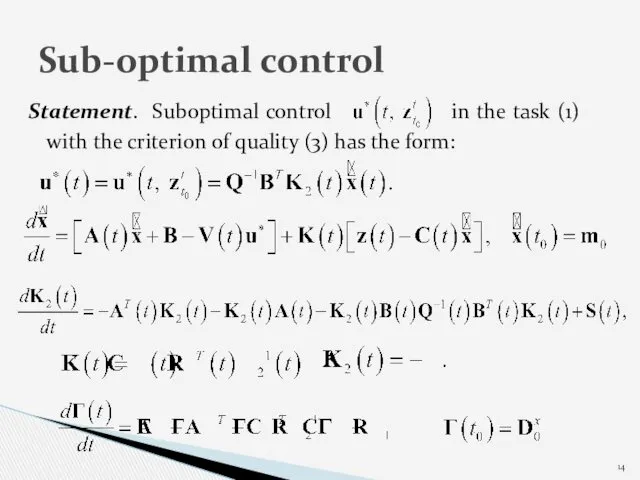
Statement. Suboptimal control in the task (1) with the criterion of
Statement. Suboptimal control in the task (1) with the criterion of
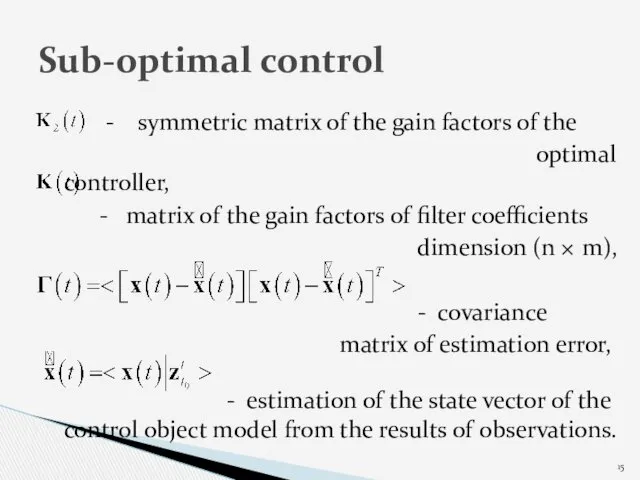
- symmetric matrix of the gain factors of the
optimal
- symmetric matrix of the gain factors of the
optimal
The system of equations on slide 14 is the Kalman-Bucy equation
The system of equations on slide 14 is the Kalman-Bucy equation
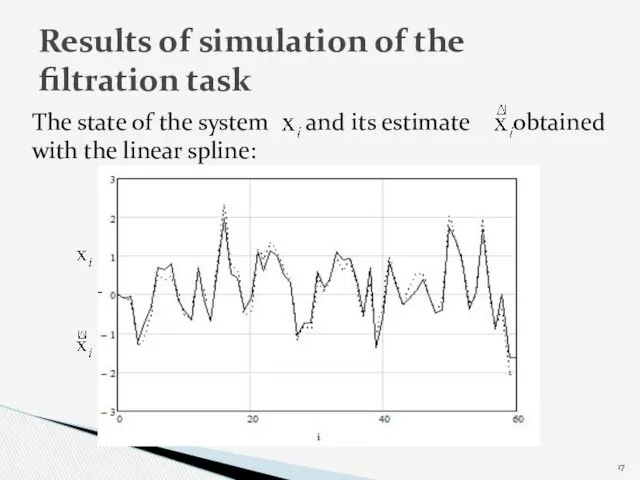
The state of the system and its estimate obtained with
The state of the system and its estimate obtained with
1. The use of splines allows one to solve problems in
1. The use of splines allows one to solve problems in
 Производная. Задачи, приводящие к понятию производной
Производная. Задачи, приводящие к понятию производной Vectors. Lecture 8
Vectors. Lecture 8 Множества. Понятие множества
Множества. Понятие множества Физико – математический турнир для учащихся 10-11 классов
Физико – математический турнир для учащихся 10-11 классов Geometric Modeling - Parametric Representation of Synthetic Curves
Geometric Modeling - Parametric Representation of Synthetic Curves Загадочное число π
Загадочное число π Формирование регулятивных универсальных учебных действий на уроках математики в начальной школе
Формирование регулятивных универсальных учебных действий на уроках математики в начальной школе Выполнение заданий части С (подготовка к ЕГЭ)
Выполнение заданий части С (подготовка к ЕГЭ) Обходы в графах. Эйлеровы и гамильтоновы графы
Обходы в графах. Эйлеровы и гамильтоновы графы Модуль Алгебра. Задача 22
Модуль Алгебра. Задача 22 Интерактивный тест по математике Задачи на приведениее к единице, 3 класс. Диск
Интерактивный тест по математике Задачи на приведениее к единице, 3 класс. Диск Дискретные случайные величины
Дискретные случайные величины урок математики в 1 классеПутешествие в зимний лес
урок математики в 1 классеПутешествие в зимний лес Авторская мультимедийная игра На что похоже для детей старшего дошкольного возраста.
Авторская мультимедийная игра На что похоже для детей старшего дошкольного возраста. Особые треугольники. Математика ОГЭ
Особые треугольники. Математика ОГЭ Счастливый случай. Игра
Счастливый случай. Игра Штей сызылған бұрыш туралы теорема
Штей сызылған бұрыш туралы теорема Цепи Маркова
Цепи Маркова Карта урока для организации занятий с использованием электронных ресурсов дистанционных технологий обучения
Карта урока для организации занятий с использованием электронных ресурсов дистанционных технологий обучения Правила вычисления производных
Правила вычисления производных Множества и операции с ними
Множества и операции с ними Математика. 1 класс. Урок 93. Табличное вычитание - Презентация
Математика. 1 класс. Урок 93. Табличное вычитание - Презентация Тренажёр. Примеры в пределах 20. (1 класс)
Тренажёр. Примеры в пределах 20. (1 класс) Теория вероятностей и математическая статистика
Теория вероятностей и математическая статистика Математика уступает свои крепости лишь сильным и смелым
Математика уступает свои крепости лишь сильным и смелым Development of an information system for evaluating the work of production employees based on statistical analysis
Development of an information system for evaluating the work of production employees based on statistical analysis Алгебраические дроби, сокращение дробей
Алгебраические дроби, сокращение дробей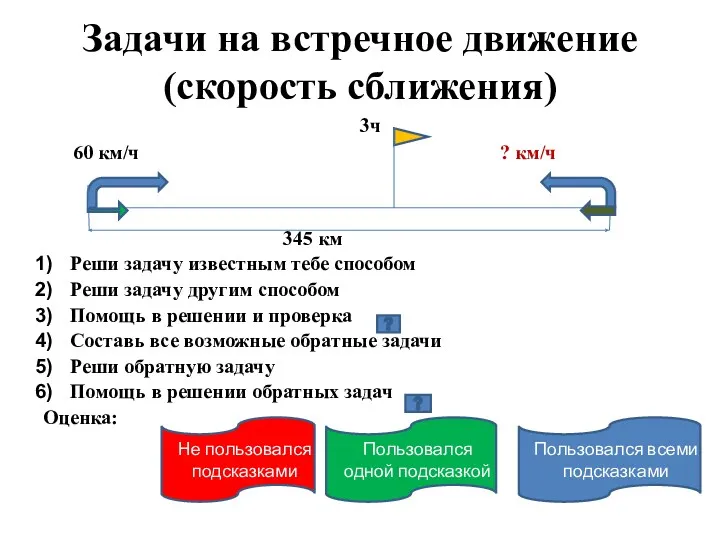 Интерактивный плакат Задачи на встречное движение (скорость сближения) - математика 4 класс
Интерактивный плакат Задачи на встречное движение (скорость сближения) - математика 4 класс