- Vectors and the geometry of space. Lecture 10.b

Содержание
- 2. VECTORS AND THE GEOMETRY OF SPACE A line in the xy-plane is determined when a point
- 3. Equations of Lines and Planes In this section, we will learn how to: Define three-dimensional lines
- 4. EQUATIONS OF LINES A line L in three-dimensional (3-D) space is determined when we know: A
- 5. EQUATIONS OF LINES In three dimensions, the direction of a line is conveniently described by a
- 6. EQUATIONS OF LINES So, we let v be a vector parallel to L. Let P(x, y,
- 7. EQUATIONS OF LINES If a is the vector with representation , then the Triangle Law for
- 8. EQUATIONS OF LINES However, since a and v are parallel vectors, there is a scalar t
- 9. VECTOR EQUATION OF A LINE Thus, r = r0 + t v This is a vector
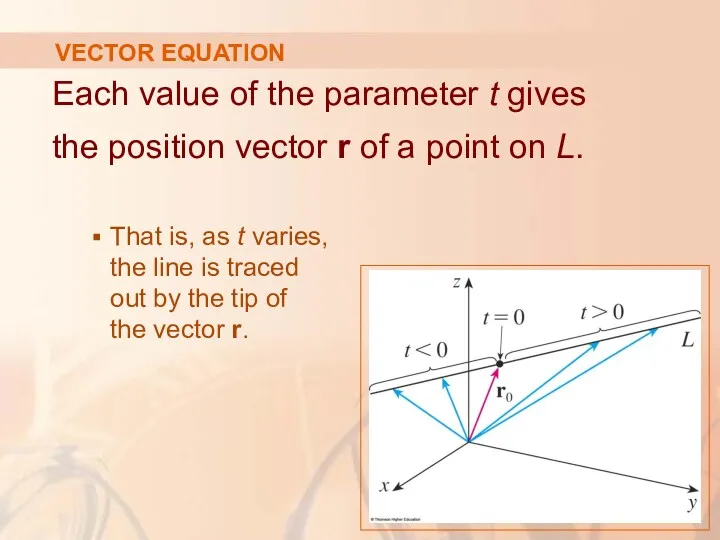
- 10. VECTOR EQUATION Each value of the parameter t gives the position vector r of a point
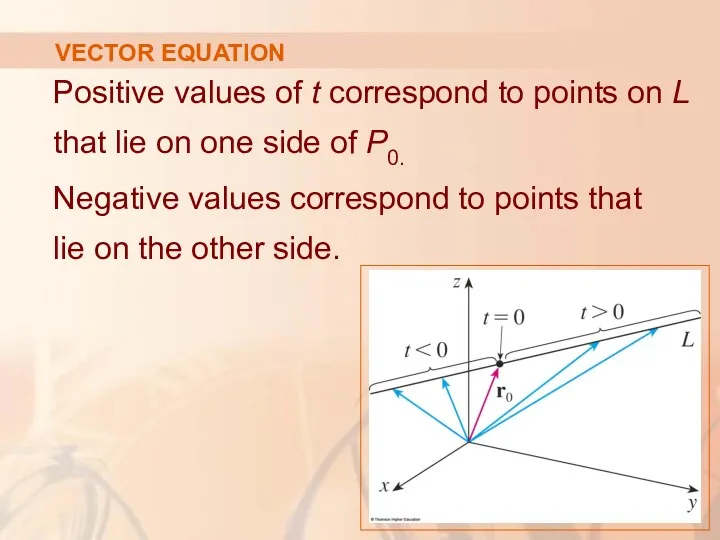
- 11. VECTOR EQUATION Positive values of t correspond to points on L that lie on one side
- 12. VECTOR EQUATION If the vector v that gives the direction of the line L is written
- 13. VECTOR EQUATION We can also write: r = and r0 = So, vector Equation 1 becomes:
- 14. VECTOR EQUATION Two vectors are equal if and only if corresponding components are equal. Hence, we
- 15. SCALAR EQUATIONS OF A LINE x = x0 + at y = y0 + bt z
- 16. PARAMETRIC EQUATIONS These equations are called parametric equations of the line L through the point P0(x0,
- 17. EQUATIONS OF LINES Find a vector equation and parametric equations for the line that passes through
- 18. EQUATIONS OF LINES Here, r0 = = 5 i + j + 3 k and v
- 19. EQUATIONS OF LINES Parametric equations are: x = 5 + t y = 1 + 4t
- 20. EQUATIONS OF LINES Choosing the parameter value t = 1 gives x = 6, y =
- 21. EQUATIONS OF LINES The vector equation and parametric equations of a line are not unique. If
- 22. EQUATIONS OF LINES For instance, if, instead of (5, 1, 3), we choose the point (6,
- 23. EQUATIONS OF LINES Alternatively, if we stay with the point (5, 1, 3) but choose the
- 24. DIRECTION NUMBERS In general, if a vector v = is used to describe the direction of
- 25. DIRECTION NUMBERS Any vector parallel to v could also be used. Thus, we see that any
- 26. EQUATIONS OF LINES Another way of describing a line L is to eliminate the parameter t
- 27. SYMMETRIC EQUATIONS These equations are called symmetric equations of L. Equations 3
- 28. SYMMETRIC EQUATIONS Notice that the numbers a, b, and c that appear in the denominators of
- 29. SYMMETRIC EQUATIONS If one of a, b, or c is 0, we can still eliminate t.
- 30. EQUATIONS OF LINES Find parametric equations and symmetric equations of the line that passes through the
- 31. EQUATIONS OF LINES We are not explicitly given a vector parallel to the line. However, observe
- 32. EQUATIONS OF LINES Thus, direction numbers are: a = 1, b = –5, c = 4
- 33. EQUATIONS OF LINES Taking the point (2, 4, –3) as P0, we see that: Parametric Equations
- 34. EQUATIONS OF LINES The line intersects the xy-plane when z = 0. So, we put z
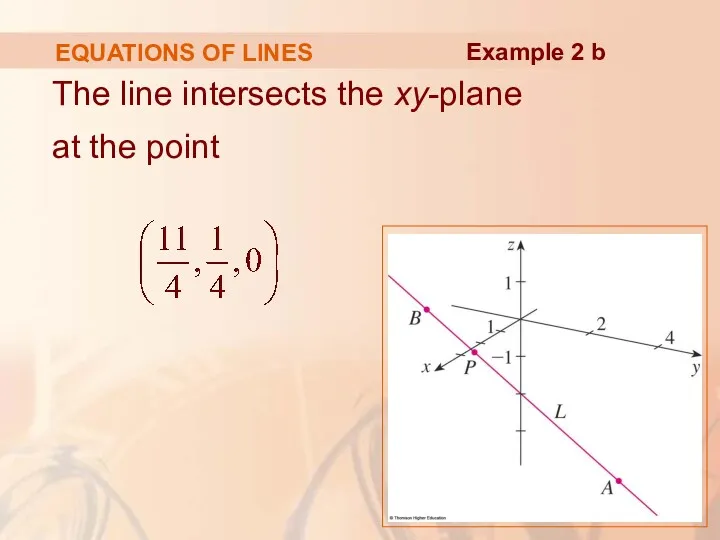
- 35. EQUATIONS OF LINES The line intersects the xy-plane at the point Example 2 b
- 36. EQUATIONS OF LINES In general, the procedure of Example 2 shows that direction numbers of the
- 37. EQUATIONS OF LINE SEGMENTS Often, we need a description, not of an entire line, but of
- 38. EQUATIONS OF LINE SEGMENTS If we put t = 0 in the parametric equations in Example
- 39. EQUATIONS OF LINE SEGMENTS So, the line segment AB is described by either: The parametric equations
- 40. EQUATIONS OF LINE SEGMENTS In general, we know from Equation 1 that the vector equation of
- 41. EQUATIONS OF LINE SEGMENTS If the line also passes through (the tip of) r1, then we
- 42. EQUATIONS OF LINE SEGMENTS The line segment from r0 to r1 is given by the vector
- 43. EQUATIONS OF LINE SEGMENTS Show that the lines L1 and L2 with parametric equations x =
- 44. EQUATIONS OF LINE SEGMENTS The lines are not parallel because the corresponding vectors and are not
- 45. EQUATIONS OF LINE SEGMENTS If L1 and L2 had a point of intersection, there would be
- 46. EQUATIONS OF LINE SEGMENTS However, if we solve the first two equations, we get: t =
- 47. EQUATIONS OF LINE SEGMENTS Thus, there are no values of t and s that satisfy the
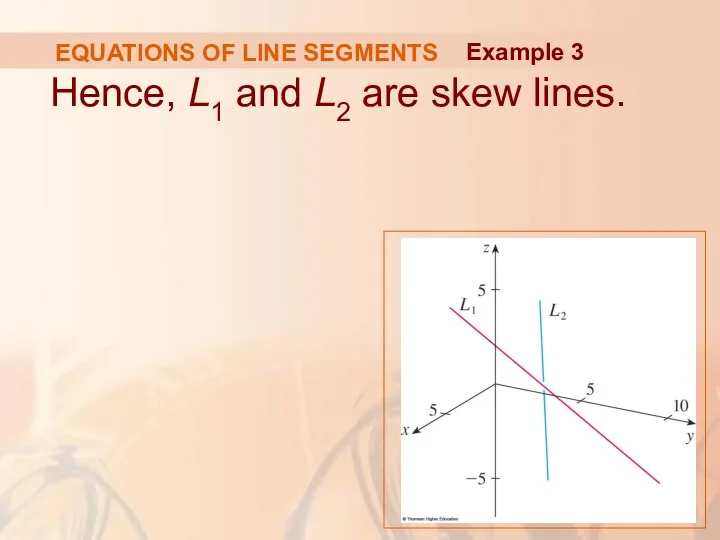
- 48. EQUATIONS OF LINE SEGMENTS Hence, L1 and L2 are skew lines. Example 3
- 49. PLANES Although a line in space is determined by a point and a direction, a plane
- 50. PLANES However, a vector perpendicular to the plane does completely specify its direction.
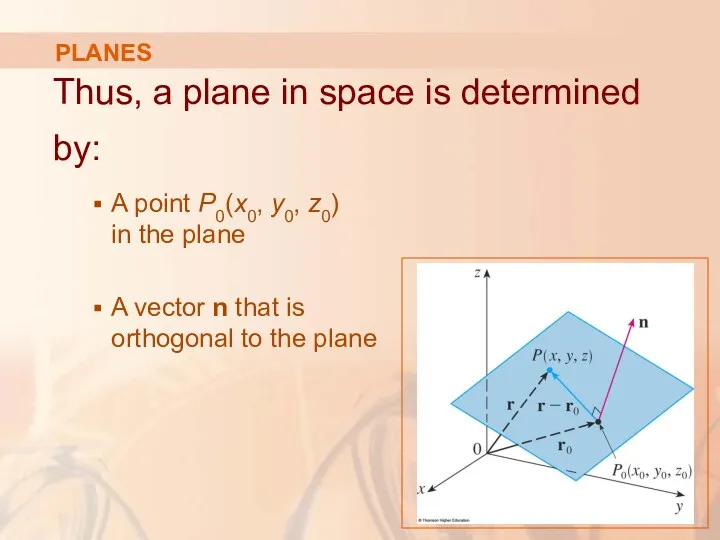
- 51. PLANES Thus, a plane in space is determined by: A point P0(x0, y0, z0) in the
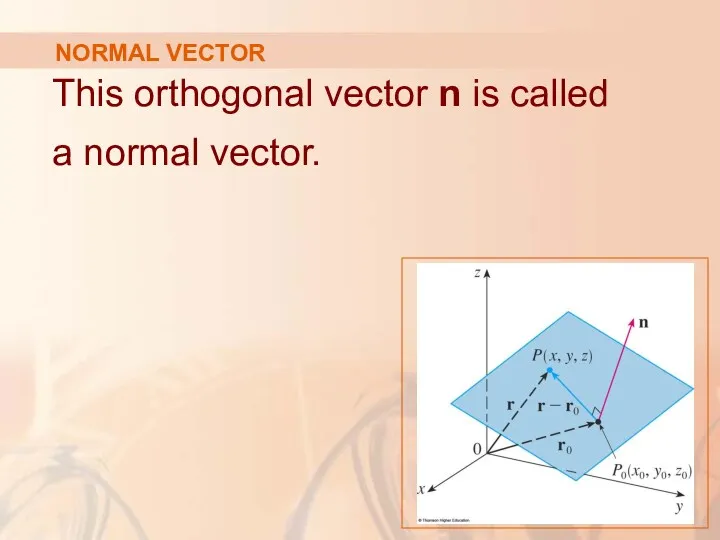
- 52. NORMAL VECTOR This orthogonal vector n is called a normal vector.
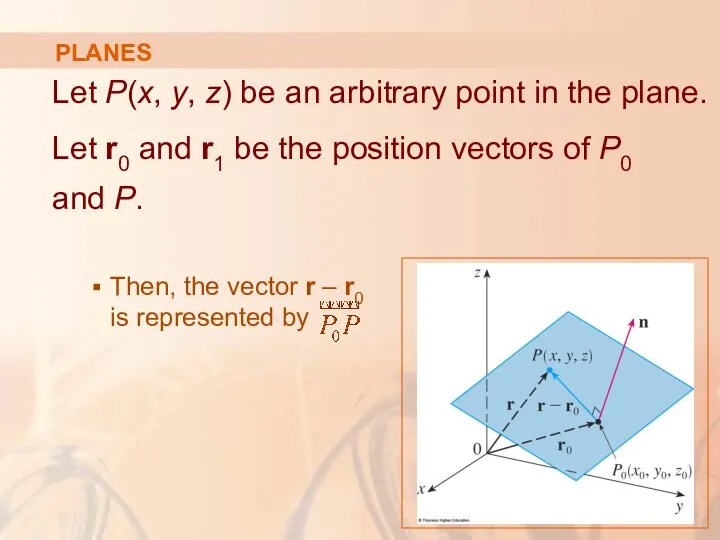
- 53. PLANES Let P(x, y, z) be an arbitrary point in the plane. Let r0 and r1
- 54. PLANES The normal vector n is orthogonal to every vector in the given plane. In particular,
- 55. EQUATIONS OF PLANES Thus, we have: n . (r – r0) = 0 Equation 5
- 56. EQUATIONS OF PLANES That can also be written as: n . r = n . r0
- 57. VECTOR EQUATION Either Equation 5 or Equation 6 is called a vector equation of the plane.
- 58. EQUATIONS OF PLANES To obtain a scalar equation for the plane, we write: n = r
- 59. EQUATIONS OF PLANES Then, the vector Equation 5 becomes: . = 0
- 60. SCALAR EQUATION That can also be written as: a(x – x0) + b(y – y0) +
- 61. EQUATIONS OF PLANES Find an equation of the plane through the point (2, 4, –1) with
- 62. EQUATIONS OF PLANES In Equation 7, putting a = 2, b = 3, c = 4,
- 63. EQUATIONS OF PLANES To find the x-intercept, we set y = z = 0 in the
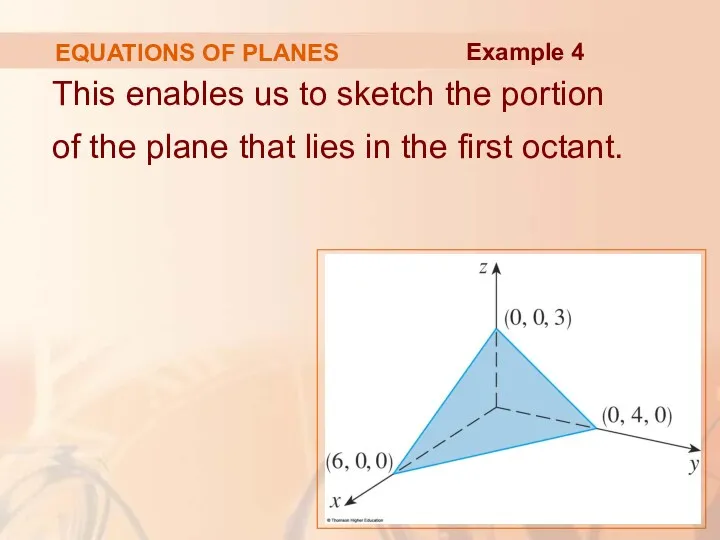
- 64. EQUATIONS OF PLANES This enables us to sketch the portion of the plane that lies in
- 65. EQUATIONS OF PLANES By collecting terms in Equation 7 as we did in Example 4, we
- 66. LINEAR EQUATION ax + by + cz + d = 0 where d = –(ax0 +
- 67. LINEAR EQUATION Conversely, it can be shown that, if a, b, and c are not all
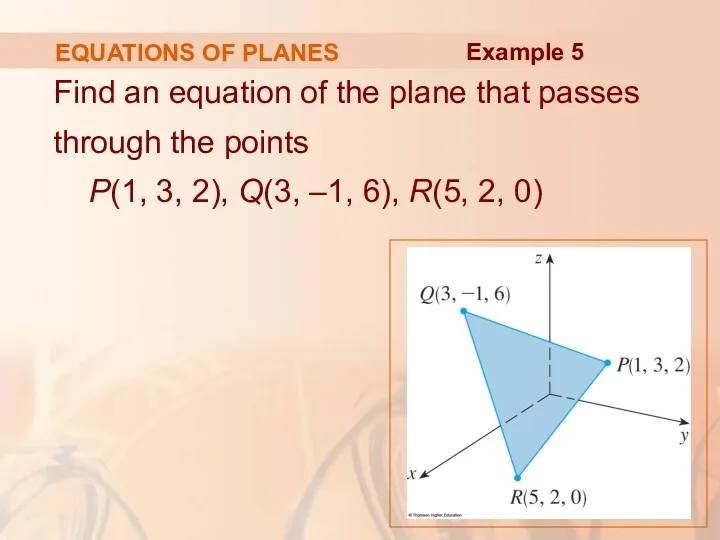
- 68. EQUATIONS OF PLANES Find an equation of the plane that passes through the points P(1, 3,
- 69. EQUATIONS OF PLANES The vectors a and b corresponding to and are: a = b =
- 70. EQUATIONS OF PLANES Since both a and b lie in the plane, their cross product a
- 71. EQUATIONS OF PLANES Thus, Example 5
- 72. EQUATIONS OF PLANES With the point P(1, 2, 3) and the normal vector n, an equation
- 73. EQUATIONS OF PLANES Find the point at which the line with parametric equations x = 2
- 74. EQUATIONS OF PLANES We substitute the expressions for x, y, and z from the parametric equations
- 75. EQUATIONS OF PLANES That simplifies to –10t = 20. Hence, t = –2. Therefore, the point
- 76. EQUATIONS OF PLANES Then, x = 2 + 3(–2) = –4 y = –4(–2) = 8
- 77. PARALLEL PLANES Two planes are parallel if their normal vectors are parallel.
- 78. PARALLEL PLANES For instance, the planes x + 2y – 3z = 4 and 2x +
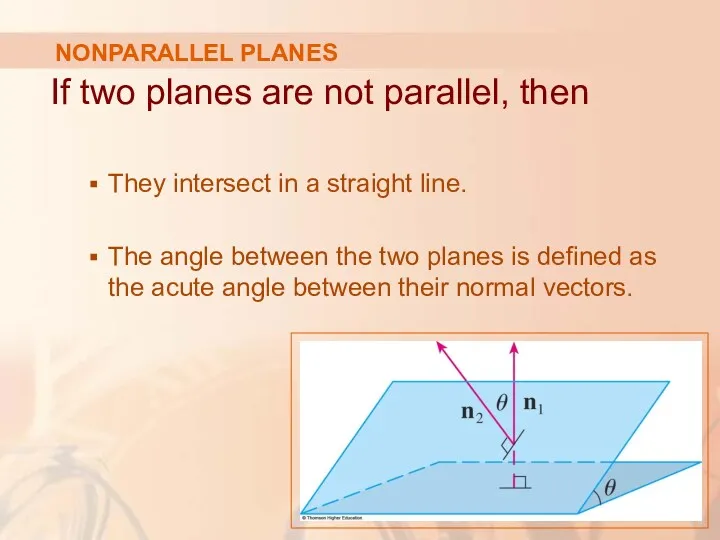
- 79. NONPARALLEL PLANES If two planes are not parallel, then They intersect in a straight line. The
- 80. EQUATIONS OF PLANES Find the angle between the planes x + y + z = 1
- 81. EQUATIONS OF PLANES The normal vectors of these planes are: n1 = n2 = Example 7
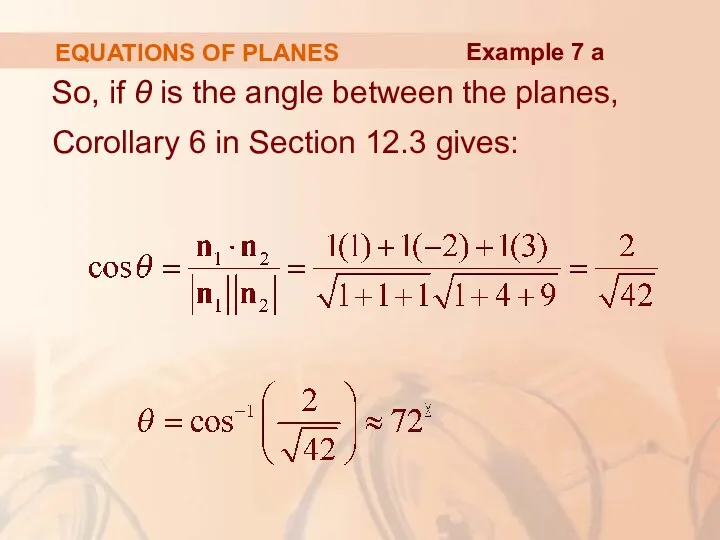
- 82. EQUATIONS OF PLANES So, if θ is the angle between the planes, Corollary 6 in Section
- 83. EQUATIONS OF PLANES We first need to find a point on L. For instance, we can
- 84. EQUATIONS OF PLANES As L lies in both planes, it is perpendicular to both the normal
- 85. EQUATIONS OF PLANES So, the symmetric equations of L can be written as: Example 7 b
- 86. NOTE A linear equation in x, y, and z represents a plane. Also, two nonparallel planes
- 87. NOTE The points (x, y, z) that satisfy both a1x + b1y + c1z + d1
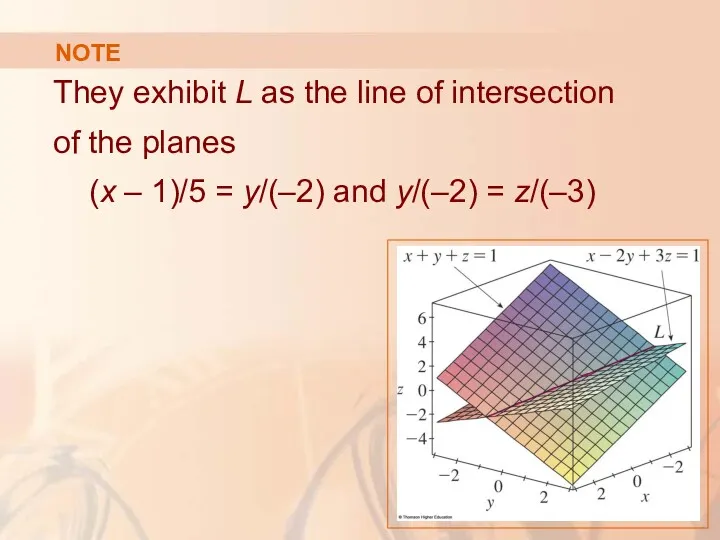
- 88. NOTE For instance, in Example 7, the line L was given as the line of intersection
- 89. NOTE The symmetric equations that we found for L could be written as: This is again
- 90. NOTE They exhibit L as the line of intersection of the planes (x – 1)/5 =
- 91. NOTE In general, when we write the equations of a line in the symmetric form we
- 92. EQUATIONS OF PLANES Find a formula for the distance D from a point P1(x1, y1, z1)
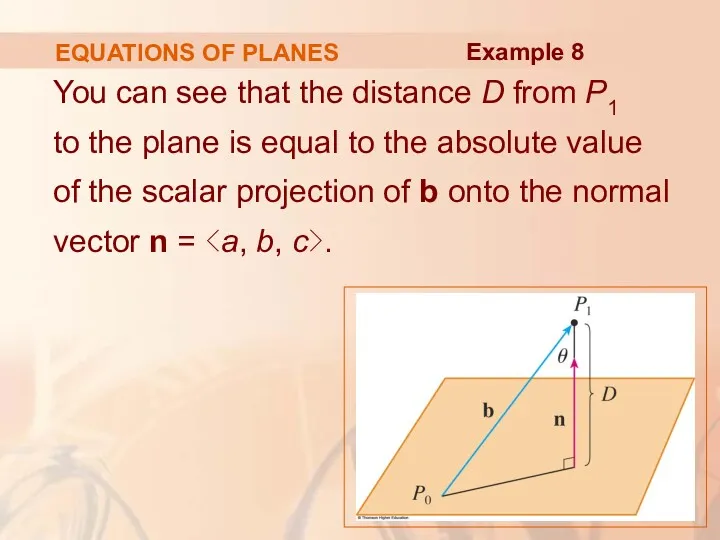
- 93. EQUATIONS OF PLANES Let P0(x0, y0, z0) be any point in the plane. Let b be
- 94. EQUATIONS OF PLANES You can see that the distance D from P1 to the plane is
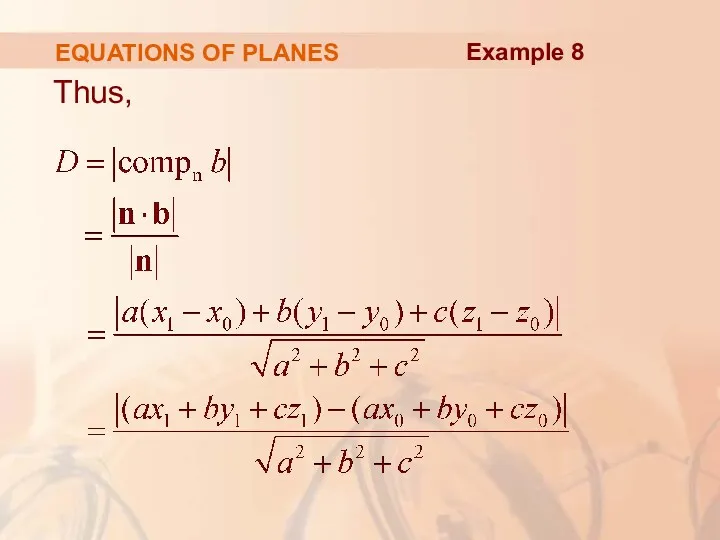
- 95. EQUATIONS OF PLANES Thus, Example 8
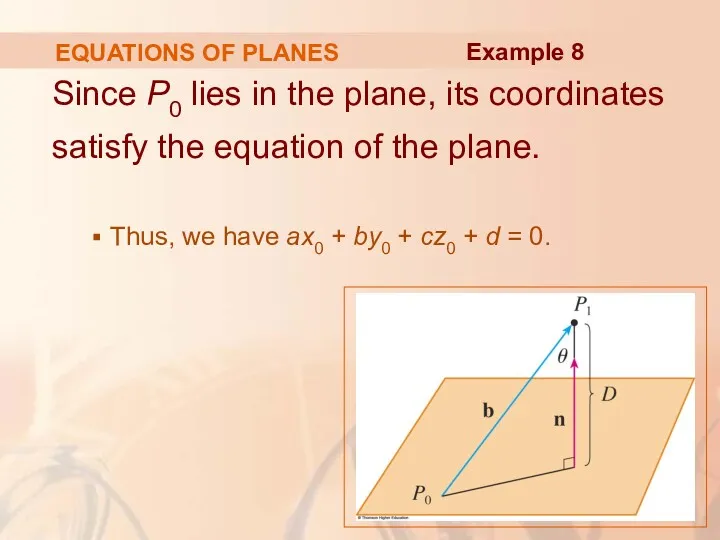
- 96. EQUATIONS OF PLANES Since P0 lies in the plane, its coordinates satisfy the equation of the
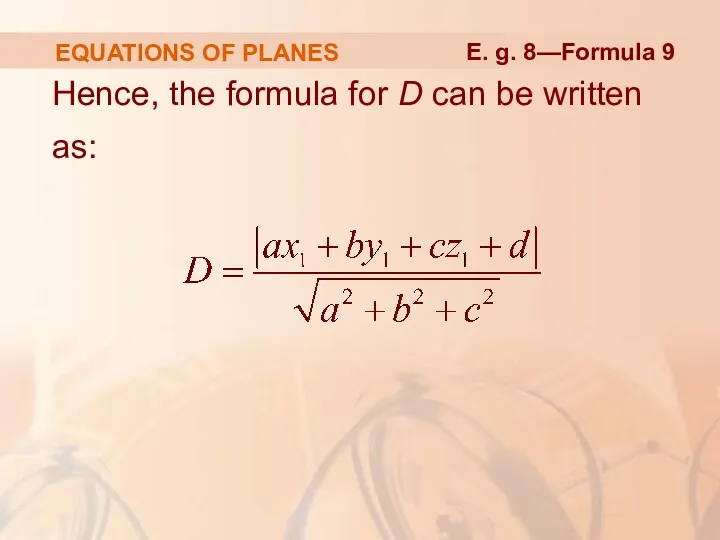
- 97. EQUATIONS OF PLANES Hence, the formula for D can be written as: E. g. 8—Formula 9
- 98. EQUATIONS OF PLANES Find the distance between the parallel planes 10x + 2y – 2z =
- 99. EQUATIONS OF PLANES First, we note that the planes are parallel because their normal vectors and
- 100. EQUATIONS OF PLANES To find the distance D between the planes, we choose any point on
- 101. EQUATIONS OF PLANES By Formula 9, the distance between (½, 0, 0) and the plane 5x
- 102. EQUATIONS OF PLANES In Example 3, we showed that the lines L1: x = 1 +
- 103. EQUATIONS OF PLANES Since the two lines L1 and L2 are skew, they can be viewed
- 104. EQUATIONS OF PLANES The common normal vector to both planes must be orthogonal to both v1
- 105. EQUATIONS OF PLANES So, a normal vector is: Example 10
- 106. EQUATIONS OF PLANES If we put s = 0 in the equations of L2, we get
- 107. EQUATIONS OF PLANES If we now set t = 0 in the equations for L1, we
- 108. EQUATIONS OF PLANES So, the distance between L1 and L2 is the same as the distance
- 110. Скачать презентацию
VECTORS AND THE GEOMETRY OF SPACE
A line in the xy-plane is determined when
VECTORS AND THE GEOMETRY OF SPACE
A line in the xy-plane is determined when
Equations of
Lines and Planes
In this section, we will learn how to:
Define three-dimensional
Equations of
Lines and Planes
In this section, we will learn how to:
Define three-dimensional
EQUATIONS OF LINES
A line L in three-dimensional (3-D) space
is determined when we
EQUATIONS OF LINES
A line L in three-dimensional (3-D) space is determined when we
EQUATIONS OF LINES
In three dimensions, the direction
of a line is conveniently described
EQUATIONS OF LINES
In three dimensions, the direction of a line is conveniently described
EQUATIONS OF LINES
So, we let v be a vector parallel to L.
Let P(x,
EQUATIONS OF LINES
So, we let v be a vector parallel to L.
Let P(x,
EQUATIONS OF LINES
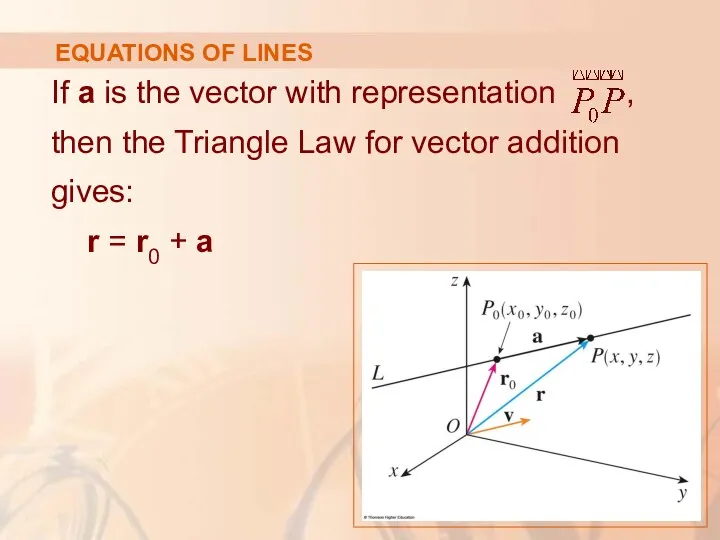
If a is the vector with representation ,
then the Triangle
EQUATIONS OF LINES
If a is the vector with representation , then the Triangle
EQUATIONS OF LINES
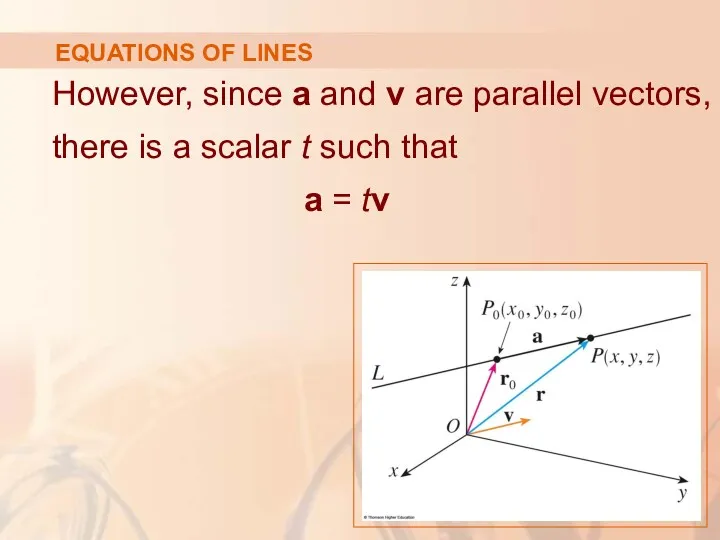
However, since a and v are parallel vectors, there is a
EQUATIONS OF LINES
However, since a and v are parallel vectors, there is a
VECTOR EQUATION OF A LINE
Thus,
r = r0 + t v
This is a
VECTOR EQUATION OF A LINE
Thus,
r = r0 + t v
This is a
VECTOR EQUATION
Each value of the parameter t gives
the position vector r of
VECTOR EQUATION
Each value of the parameter t gives the position vector r of
VECTOR EQUATION
Positive values of t correspond to points on L that lie on
VECTOR EQUATION
Positive values of t correspond to points on L that lie on
VECTOR EQUATION
If the vector v that gives the direction of
the line L
VECTOR EQUATION
If the vector v that gives the direction of the line L
VECTOR EQUATION
We can also write:
r = and r0 =
VECTOR EQUATION
We can also write:
r =
VECTOR EQUATION
Two vectors are equal if and only if corresponding components are equal.
Hence,
VECTOR EQUATION
Two vectors are equal if and only if corresponding components are equal.
Hence,
SCALAR EQUATIONS OF A LINE
x = x0 + at
y = y0 + bt
z
SCALAR EQUATIONS OF A LINE
x = x0 + at
y = y0 + bt
z
PARAMETRIC EQUATIONS
These equations are called parametric equations of the line L through the
PARAMETRIC EQUATIONS
These equations are called parametric equations of the line L through the
EQUATIONS OF LINES
Find a vector equation and parametric equations for the line that
EQUATIONS OF LINES
Find a vector equation and parametric equations for the line that
EQUATIONS OF LINES
Here, r0 = <5, 1, 3> = 5 i + j
EQUATIONS OF LINES
Here, r0 = <5, 1, 3> = 5 i + j
EQUATIONS OF LINES
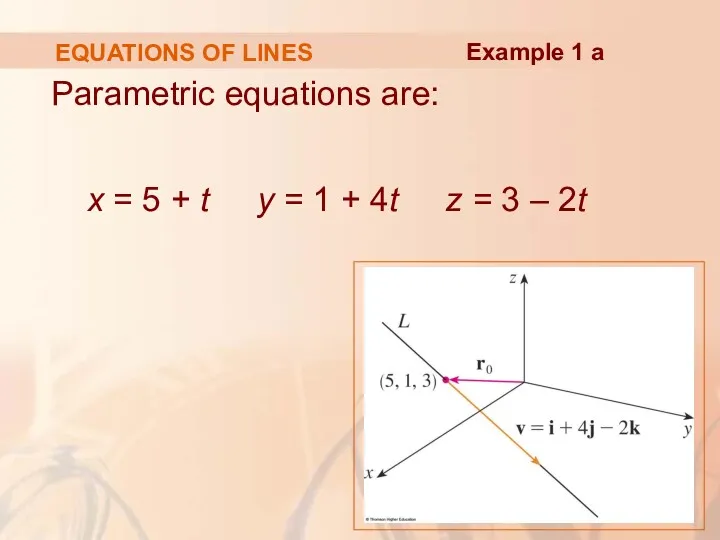
Parametric equations are:
x = 5 + t y = 1
EQUATIONS OF LINES
Parametric equations are: x = 5 + t y = 1
EQUATIONS OF LINES
Choosing the parameter value t = 1
gives x = 6,
EQUATIONS OF LINES
Choosing the parameter value t = 1 gives x = 6,
EQUATIONS OF LINES
The vector equation and parametric equations of a line are not
EQUATIONS OF LINES
The vector equation and parametric equations of a line are not
EQUATIONS OF LINES
For instance, if, instead of (5, 1, 3),
we choose the point
EQUATIONS OF LINES
For instance, if, instead of (5, 1, 3), we choose the point
EQUATIONS OF LINES
Alternatively, if we stay with the point (5, 1, 3) but
EQUATIONS OF LINES
Alternatively, if we stay with the point (5, 1, 3) but
DIRECTION NUMBERS
In general, if a vector v = is used
DIRECTION NUMBERS
In general, if a vector v =
DIRECTION NUMBERS
Any vector parallel to v could also be used.
Thus, we see that
DIRECTION NUMBERS
Any vector parallel to v could also be used.
Thus, we see that
EQUATIONS OF LINES
Another way of describing a line L
is to eliminate the
EQUATIONS OF LINES
Another way of describing a line L is to eliminate the
SYMMETRIC EQUATIONS
These equations are called symmetric equations of L.
Equations 3
SYMMETRIC EQUATIONS
These equations are called symmetric equations of L.
Equations 3
SYMMETRIC EQUATIONS
Notice that the numbers a, b, and c that appear in the
SYMMETRIC EQUATIONS
Notice that the numbers a, b, and c that appear in the
SYMMETRIC EQUATIONS
If one of a, b, or c is 0, we can still
SYMMETRIC EQUATIONS
If one of a, b, or c is 0, we can still
EQUATIONS OF LINES
Find parametric equations and symmetric equations of the line that passes
EQUATIONS OF LINES
Find parametric equations and symmetric equations of the line that passes
EQUATIONS OF LINES
We are not explicitly given a vector parallel
to the line.
However,
EQUATIONS OF LINES
We are not explicitly given a vector parallel
to the line.
However,
EQUATIONS OF LINES
Thus, direction numbers are:
a = 1, b = –5, c =
EQUATIONS OF LINES
Thus, direction numbers are:
a = 1, b = –5, c =
EQUATIONS OF LINES
Taking the point (2, 4, –3) as P0,
we see that:
Parametric
EQUATIONS OF LINES
Taking the point (2, 4, –3) as P0,
we see that:
Parametric
EQUATIONS OF LINES
The line intersects the xy-plane when z = 0.
So, we put
EQUATIONS OF LINES
The line intersects the xy-plane when z = 0.
So, we put
EQUATIONS OF LINES
The line intersects the xy-plane
at the point
Example 2 b
EQUATIONS OF LINES
The line intersects the xy-plane
at the point
Example 2 b
EQUATIONS OF LINES
In general, the procedure of Example 2 shows that direction numbers
EQUATIONS OF LINES
In general, the procedure of Example 2 shows that direction numbers
EQUATIONS OF LINE SEGMENTS
Often, we need a description, not of
an entire line,
EQUATIONS OF LINE SEGMENTS
Often, we need a description, not of an entire line,
EQUATIONS OF LINE SEGMENTS
If we put t = 0 in the parametric equations
EQUATIONS OF LINE SEGMENTS
If we put t = 0 in the parametric equations
EQUATIONS OF LINE SEGMENTS
So, the line segment AB is described by either:
The parametric
EQUATIONS OF LINE SEGMENTS
So, the line segment AB is described by either:
The parametric
EQUATIONS OF LINE SEGMENTS
In general, we know from Equation 1 that
the vector
EQUATIONS OF LINE SEGMENTS
In general, we know from Equation 1 that the vector
EQUATIONS OF LINE SEGMENTS
If the line also passes through (the tip of) r1,
EQUATIONS OF LINE SEGMENTS
If the line also passes through (the tip of) r1,
EQUATIONS OF LINE SEGMENTS
The line segment from r0 to r1 is given by
EQUATIONS OF LINE SEGMENTS
The line segment from r0 to r1 is given by
EQUATIONS OF LINE SEGMENTS
Show that the lines L1 and L2 with parametric equations
EQUATIONS OF LINE SEGMENTS
Show that the lines L1 and L2 with parametric equations
EQUATIONS OF LINE SEGMENTS
The lines are not parallel because
the corresponding vectors <1,
EQUATIONS OF LINE SEGMENTS
The lines are not parallel because the corresponding vectors <1,
EQUATIONS OF LINE SEGMENTS
If L1 and L2 had a point of intersection,
there
EQUATIONS OF LINE SEGMENTS
If L1 and L2 had a point of intersection, there
EQUATIONS OF LINE SEGMENTS
However, if we solve the first two equations, we get:
EQUATIONS OF LINE SEGMENTS
However, if we solve the first two equations, we get:
EQUATIONS OF LINE SEGMENTS
Thus, there are no values of t and s
that
EQUATIONS OF LINE SEGMENTS
Thus, there are no values of t and s that
EQUATIONS OF LINE SEGMENTS
Hence, L1 and L2 are skew lines.
Example 3
EQUATIONS OF LINE SEGMENTS
Hence, L1 and L2 are skew lines.
Example 3
PLANES
Although a line in space is determined by
a point and a direction,
PLANES
Although a line in space is determined by a point and a direction,
PLANES
However, a vector perpendicular
to the plane does completely specify
its direction.
PLANES
However, a vector perpendicular
to the plane does completely specify
its direction.
PLANES
Thus, a plane in space is determined
by:
A point P0(x0, y0, z0)
in
PLANES
Thus, a plane in space is determined
by:
A point P0(x0, y0, z0)
in
NORMAL VECTOR
This orthogonal vector n is called
a normal vector.
NORMAL VECTOR
This orthogonal vector n is called
a normal vector.
PLANES
Let P(x, y, z) be an arbitrary point in the plane.
Let r0 and
PLANES
Let P(x, y, z) be an arbitrary point in the plane.
Let r0 and
PLANES
The normal vector n is orthogonal to every vector in the given plane.
PLANES
The normal vector n is orthogonal to every vector in the given plane.
EQUATIONS OF PLANES
Thus, we have: n . (r – r0) = 0
Equation 5
EQUATIONS OF PLANES
Thus, we have: n . (r – r0) = 0
Equation 5
EQUATIONS OF PLANES
That can also be written as:
n . r = n
EQUATIONS OF PLANES
That can also be written as: n . r = n
VECTOR EQUATION
Either Equation 5 or Equation 6
is called a vector equation of
VECTOR EQUATION
Either Equation 5 or Equation 6 is called a vector equation of
EQUATIONS OF PLANES
To obtain a scalar equation for the plane,
we write:
n
EQUATIONS OF PLANES
To obtain a scalar equation for the plane,
we write:
n
EQUATIONS OF PLANES
Then, the vector Equation 5
becomes: . 
EQUATIONS OF PLANES
Then, the vector Equation 5
becomes:
SCALAR EQUATION
That can also be written as:
a(x – x0) + b(y – y0)
SCALAR EQUATION
That can also be written as:
a(x – x0) + b(y – y0)
EQUATIONS OF PLANES
Find an equation of the plane through
the point (2, 4,
EQUATIONS OF PLANES
Find an equation of the plane through the point (2, 4,
EQUATIONS OF PLANES
In Equation 7, putting
a = 2, b = 3,
EQUATIONS OF PLANES
In Equation 7, putting
a = 2, b = 3,
EQUATIONS OF PLANES
To find the x-intercept, we set y = z = 0
EQUATIONS OF PLANES
To find the x-intercept, we set y = z = 0
EQUATIONS OF PLANES
This enables us to sketch the portion
of the plane that
EQUATIONS OF PLANES
This enables us to sketch the portion of the plane that
EQUATIONS OF PLANES
By collecting terms in Equation 7
as we did in Example
EQUATIONS OF PLANES
By collecting terms in Equation 7 as we did in Example
LINEAR EQUATION
ax + by + cz + d = 0
where d = –(ax0
LINEAR EQUATION
ax + by + cz + d = 0
where d = –(ax0
LINEAR EQUATION
Conversely, it can be shown that, if
a, b, and c are
LINEAR EQUATION
Conversely, it can be shown that, if a, b, and c are
EQUATIONS OF PLANES
Find an equation of the plane that passes through the points
EQUATIONS OF PLANES
Find an equation of the plane that passes through the points
EQUATIONS OF PLANES
The vectors a and b corresponding to and are:
a = <2,
EQUATIONS OF PLANES
The vectors a and b corresponding to and are:
a = <2,
EQUATIONS OF PLANES
Since both a and b lie in the plane,
their cross
EQUATIONS OF PLANES
Since both a and b lie in the plane, their cross
EQUATIONS OF PLANES
Thus,
Example 5
EQUATIONS OF PLANES
Thus,
Example 5
EQUATIONS OF PLANES
With the point P(1, 2, 3) and the normal
vector n,
EQUATIONS OF PLANES
With the point P(1, 2, 3) and the normal vector n,
EQUATIONS OF PLANES
Find the point at which the line with
parametric equations
x
EQUATIONS OF PLANES
Find the point at which the line with
parametric equations
x
EQUATIONS OF PLANES
We substitute the expressions for x, y, and z from the
EQUATIONS OF PLANES
We substitute the expressions for x, y, and z from the
EQUATIONS OF PLANES
That simplifies to –10t = 20.
Hence, t = –2.
Therefore, the point
EQUATIONS OF PLANES
That simplifies to –10t = 20.
Hence, t = –2.
Therefore, the point
EQUATIONS OF PLANES
Then,
x = 2 + 3(–2) = –4
y =
EQUATIONS OF PLANES
Then,
x = 2 + 3(–2) = –4
y =
PARALLEL PLANES
Two planes are parallel
if their normal vectors are
parallel.
PARALLEL PLANES
Two planes are parallel
if their normal vectors are
parallel.
PARALLEL PLANES
For instance, the planes
x + 2y – 3z = 4 and
PARALLEL PLANES
For instance, the planes
x + 2y – 3z = 4 and
NONPARALLEL PLANES
If two planes are not parallel, then
They intersect in a straight line.
The
NONPARALLEL PLANES
If two planes are not parallel, then
They intersect in a straight line.
The
EQUATIONS OF PLANES
Find the angle between the planes
x + y + z
EQUATIONS OF PLANES
Find the angle between the planes x + y + z
EQUATIONS OF PLANES
The normal vectors of these planes
are:
n1 = <1, 1,
EQUATIONS OF PLANES
The normal vectors of these planes are: n1 = <1, 1,
EQUATIONS OF PLANES
So, if θ is the angle between the planes,
Corollary 6
EQUATIONS OF PLANES
So, if θ is the angle between the planes, Corollary 6
EQUATIONS OF PLANES
We first need to find a point on L.
For instance,
EQUATIONS OF PLANES
We first need to find a point on L.
For instance,
EQUATIONS OF PLANES
As L lies in both planes, it is perpendicular to both
EQUATIONS OF PLANES
As L lies in both planes, it is perpendicular to both
EQUATIONS OF PLANES
So, the symmetric equations of L can be written as:
Example 7
EQUATIONS OF PLANES
So, the symmetric equations of L can be written as:
Example 7
NOTE
A linear equation in x, y, and z represents
a plane.
Also, two nonparallel
NOTE
A linear equation in x, y, and z represents
a plane.
Also, two nonparallel
NOTE
The points (x, y, z) that satisfy both
a1x + b1y + c1z
NOTE
The points (x, y, z) that satisfy both
a1x + b1y + c1z
NOTE
For instance, in Example 7, the line L
was given as the line
NOTE
For instance, in Example 7, the line L was given as the line
NOTE
The symmetric equations that we found for L could be written as:
This
NOTE
The symmetric equations that we found for L could be written as:
This
NOTE
They exhibit L as the line of intersection
of the planes
(x –
NOTE
They exhibit L as the line of intersection of the planes (x –
NOTE
In general, when we write the equations
of a line in the symmetric
NOTE
In general, when we write the equations of a line in the symmetric
EQUATIONS OF PLANES
Find a formula for the distance D
from a point P1(x1,
EQUATIONS OF PLANES
Find a formula for the distance D from a point P1(x1,
EQUATIONS OF PLANES
Let P0(x0, y0, z0) be any point in the plane.
Let b
EQUATIONS OF PLANES
Let P0(x0, y0, z0) be any point in the plane.
Let b
EQUATIONS OF PLANES
You can see that the distance D from P1
to the
EQUATIONS OF PLANES
You can see that the distance D from P1 to the
EQUATIONS OF PLANES
Thus,
Example 8
EQUATIONS OF PLANES
Thus,
Example 8
EQUATIONS OF PLANES
Since P0 lies in the plane, its coordinates satisfy the equation
EQUATIONS OF PLANES
Since P0 lies in the plane, its coordinates satisfy the equation
EQUATIONS OF PLANES
Hence, the formula for D can be written
as:
E. g.
EQUATIONS OF PLANES
Hence, the formula for D can be written
as:
E. g.
EQUATIONS OF PLANES
Find the distance between the parallel planes 10x + 2y –
EQUATIONS OF PLANES
Find the distance between the parallel planes 10x + 2y –
EQUATIONS OF PLANES
First, we note that the planes are parallel because their normal
EQUATIONS OF PLANES
First, we note that the planes are parallel because their normal
EQUATIONS OF PLANES
To find the distance D between the planes,
we choose any
EQUATIONS OF PLANES
To find the distance D between the planes, we choose any
EQUATIONS OF PLANES
By Formula 9, the distance between (½, 0, 0) and the
EQUATIONS OF PLANES
By Formula 9, the distance between (½, 0, 0) and the
EQUATIONS OF PLANES
In Example 3, we showed that the lines
L1: x =
EQUATIONS OF PLANES
In Example 3, we showed that the lines L1: x =
EQUATIONS OF PLANES
Since the two lines L1 and L2 are skew,
they can
EQUATIONS OF PLANES
Since the two lines L1 and L2 are skew, they can
EQUATIONS OF PLANES
The common normal vector to both planes must be orthogonal to
EQUATIONS OF PLANES
The common normal vector to both planes must be orthogonal to
EQUATIONS OF PLANES
So, a normal vector is:
Example 10
EQUATIONS OF PLANES
So, a normal vector is:
Example 10
EQUATIONS OF PLANES
If we put s = 0 in the equations of L2,
EQUATIONS OF PLANES
If we put s = 0 in the equations of L2,
EQUATIONS OF PLANES
If we now set t = 0 in the equations
for
EQUATIONS OF PLANES
If we now set t = 0 in the equations for
EQUATIONS OF PLANES
So, the distance between L1 and L2
is the same as
EQUATIONS OF PLANES
So, the distance between L1 and L2 is the same as
 Correlation Analysis and Covariance
Correlation Analysis and Covariance Обобщающий урок по теме Четырёхугольники.
Обобщающий урок по теме Четырёхугольники. Цилиндр. Площадь поверхности цилиндра
Цилиндр. Площадь поверхности цилиндра Векторы в пространстве
Векторы в пространстве Геометрия. Решаем задачи. 8 класс
Геометрия. Решаем задачи. 8 класс Сложение однозначных чисел с переходом через десяток, вида + 4
Сложение однозначных чисел с переходом через десяток, вида + 4 Решение квадратных неравенств
Решение квадратных неравенств Сумма углов треугольника
Сумма углов треугольника Проект Золотое сечение
Проект Золотое сечение Презентация по математике Тетраэдр
Презентация по математике Тетраэдр Вправи на всі дії із звичайними і десятковими дробами. Окремі способи множення і ділення звичайних і десяткових дробів
Вправи на всі дії із звичайними і десятковими дробами. Окремі способи множення і ділення звичайних і десяткових дробів Теорема Пифагора
Теорема Пифагора Система использования ключевых задач геометрии при обучении математике
Система использования ключевых задач геометрии при обучении математике Применение признаков равенства треугольников при решении задач
Применение признаков равенства треугольников при решении задач Справочник по алгебре. (7-9 класс)
Справочник по алгебре. (7-9 класс) Закрепление пройденного материала. 1 класс
Закрепление пройденного материала. 1 класс Один из способов решения задач на концентрацию, сплавы, смеси и разбавление
Один из способов решения задач на концентрацию, сплавы, смеси и разбавление Деление десятичных дробей. 5 класс
Деление десятичных дробей. 5 класс Определение подобных треугольников. (Упражнение 9. 8 класс)
Определение подобных треугольников. (Упражнение 9. 8 класс) Кривые второго порядка. Эллипс, гипербола, парабола
Кривые второго порядка. Эллипс, гипербола, парабола Число та цифра 5
Число та цифра 5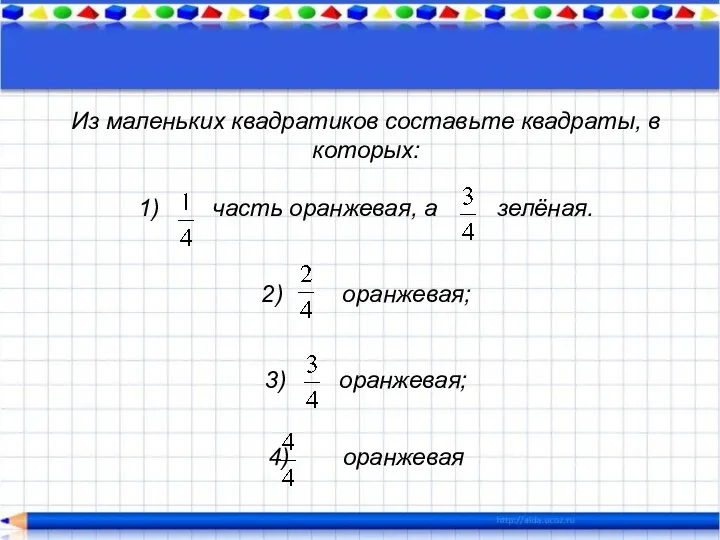 Решение задач на отыскание части от целого и целого по его части
Решение задач на отыскание части от целого и целого по его части Преобразование тригонометрических выражений
Преобразование тригонометрических выражений Статистические методы исследования экспериментальных данных
Статистические методы исследования экспериментальных данных УРОК МАТЕМАТИКИ
УРОК МАТЕМАТИКИ Задачи на проценты. ЕГЭ
Задачи на проценты. ЕГЭ прибавление и вычитание 2 и 3
прибавление и вычитание 2 и 3 В мире интересного. О математике
В мире интересного. О математике