- Зв’язаність графів. Шляхи, цикли ізоморфізм

Содержание
- 2. Зміст Вступ…………………………………………………. 3 Шлях…………………….………………………….. 4 Цикл.................................... …………………………..6 Теорема............................................................... ……..7 Орієнтований граф …………………………………..8 Зв’язаність графів................................ ……………….9 Ізоморфізм
- 3. Вступ Теорія графів — одна з істотних частин математичного апарату інформатики та кібернетики. У термінах теорії
- 4. Шлях Шляхом довжиною r [52] із вершини и в вершину v в неорієнтованому графі називають послідовність
- 5. Циклом у неорієнтованому графі називають шлях, який з’єднує вершину саму собою, тобто и = V. Цикл
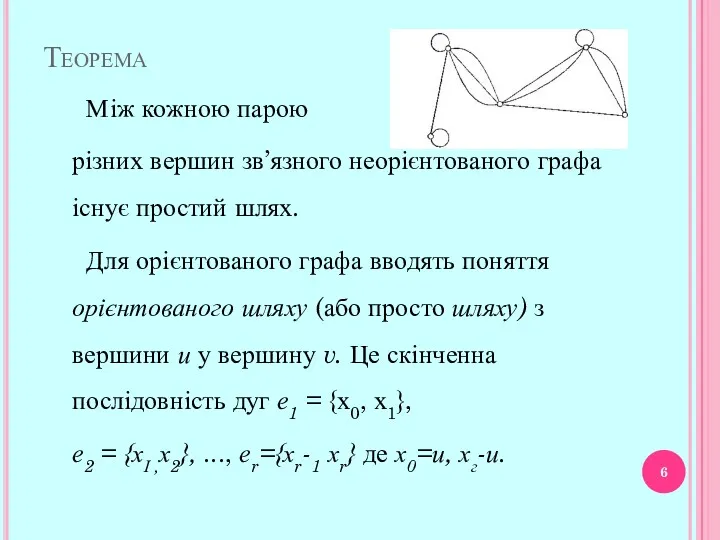
- 6. Теорема Між кожною парою різних вершин зв’язного неорієнтованого графа існує простий шлях. Для орієнтованого графа вводять
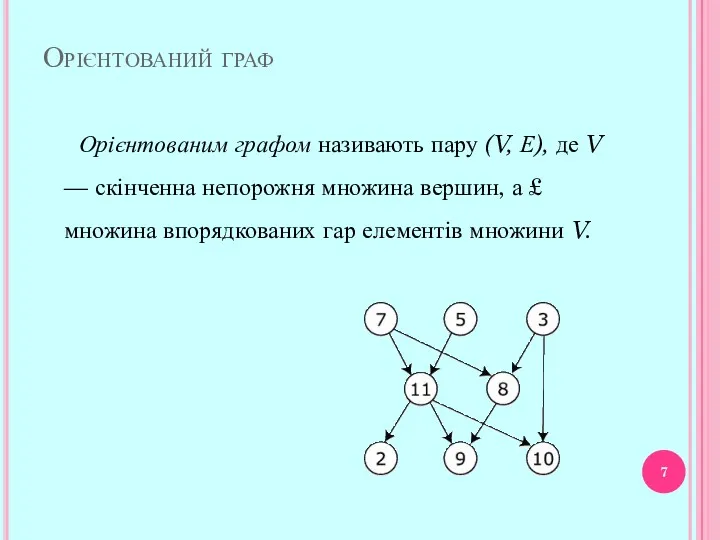
- 7. Орієнтований граф Орієнтованим графом називають пару (V, Е), де V — скінченна непорожня множина вершин, а
- 8. Зв’язаність графів Орієнтований граф називають сильно зв’язним, якщо для будь-яких його різних вершин и та V
- 9. Ізоморфізм графів У теорії графів і її застосуваннях істотно, що існують об’єкти (вершини графа) і зв’язки
- 10. Нехай G1 = (VІ, Е1) і G2=(V2, Е2) прості графи, а φ: Vх → V2 —
- 11. Ізоморфні графи
- 12. Теорема Прості графи ізоморфні тоді й лише тоді, коли їх матриці суміжності можна отримати одну з
- 13. Проблема визначення Часто неважко довести, що два прості графи не ізоморфні, якщо порушується ачастивість, інваріантна щодо
- 14. Висновки Отже, не існує набору інваріантів для виявлення ізоморфізму. Для сильної зв’язності орієнтованого графа має існувати
- 16. Скачать презентацию
Зміст
Вступ…………………………………………………. 3
Шлях…………………….………………………….. 4
Цикл.................................... …………………………..6
Теорема............................................................... ……..7
Орієнтований граф …………………………………..8
Зв’язаність графів................................ ……………….9
Ізоморфізм графів................................................... …10
Ізоморфні графи.........……………………...……..11
Теорема............... ……………………………………12
Проблеми визначення……….……………………...13
Висновки …………………………………………....14
Список літератури ……………………………….....15
Зміст
Вступ…………………………………………………. 3
Шлях…………………….………………………….. 4
Цикл.................................... …………………………..6
Теорема............................................................... ……..7
Орієнтований граф …………………………………..8
Зв’язаність графів................................ ……………….9
Ізоморфізм графів................................................... …10
Ізоморфні графи.........……………………...……..11
Теорема............... ……………………………………12
Проблеми визначення……….……………………...13
Висновки …………………………………………....14
Список літератури ……………………………….....15
Вступ
Теорія графів — одна з істотних частин математичного апарату інформатики та
Вступ
Теорія графів — одна з істотних частин математичного апарату інформатики та
![Шлях Шляхом довжиною r [52] із вершини и в вершину](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/268045/slide-3.jpg)
Шлях
Шляхом довжиною r [52] із вершини и в вершину v в
Шлях
Шляхом довжиною r [52] із вершини и в вершину v в
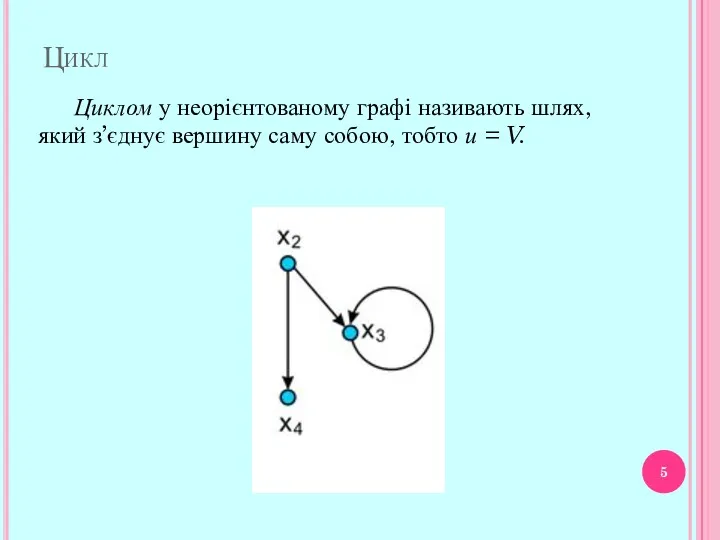
Циклом у неорієнтованому графі називають шлях, який з’єднує вершину саму собою,
Циклом у неорієнтованому графі називають шлях, який з’єднує вершину саму собою,
Теорема
Між кожною парою
різних вершин зв’язного неорієнтованого графа існує простий шлях.
Для
Теорема
Між кожною парою
різних вершин зв’язного неорієнтованого графа існує простий шлях.
Для
Орієнтований граф
Орієнтованим графом називають пару (V, Е), де V —
Орієнтований граф
Орієнтованим графом називають пару (V, Е), де V —
Зв’язаність графів
Орієнтований граф називають сильно зв’язним, якщо для будь-яких його
Зв’язаність графів
Орієнтований граф називають сильно зв’язним, якщо для будь-яких його
Ізоморфізм графів
У теорії графів і її застосуваннях істотно, що існують
Ізоморфізм графів
У теорії графів і її застосуваннях істотно, що існують
Нехай G1 = (VІ, Е1) і G2=(V2, Е2) прості графи,
Нехай G1 = (VІ, Е1) і G2=(V2, Е2) прості графи,
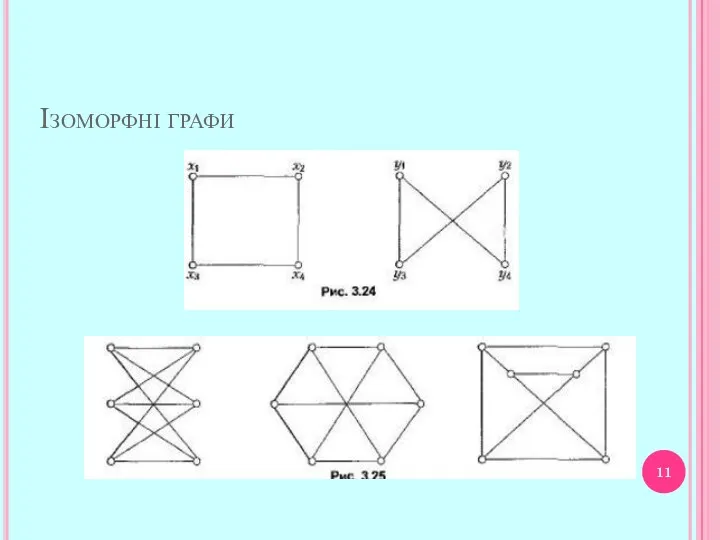
Ізоморфні графи
Ізоморфні графи
Теорема
Прості графи ізоморфні тоді й лише тоді, коли їх матриці
Теорема
Прості графи ізоморфні тоді й лише тоді, коли їх матриці
Проблема визначення
Часто неважко довести, що два прості графи не ізоморфні,
Проблема визначення
Часто неважко довести, що два прості графи не ізоморфні,
Висновки
Отже, не існує набору інваріантів для виявлення ізоморфізму.
Для сильної зв’язності орієнтованого
Висновки
Отже, не існує набору інваріантів для виявлення ізоморфізму.
Для сильної зв’язності орієнтованого
 Функция y=k/x, её график и свойства. 8 класс. Урок 1
Функция y=k/x, её график и свойства. 8 класс. Урок 1 Введение в статистику
Введение в статистику Презентация Час. Минута
Презентация Час. Минута Игра Математический лабиринт
Игра Математический лабиринт Урок 30. Линейная функция у = кх
Урок 30. Линейная функция у = кх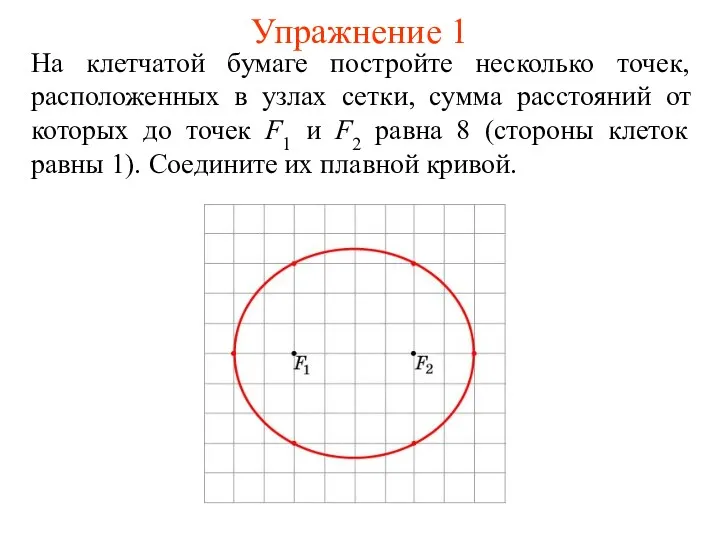 Эллипс
Эллипс Итоговое повторение по геометрии, 7 класс
Итоговое повторение по геометрии, 7 класс Измерение углов
Измерение углов презентация на тему Организм человека
презентация на тему Организм человека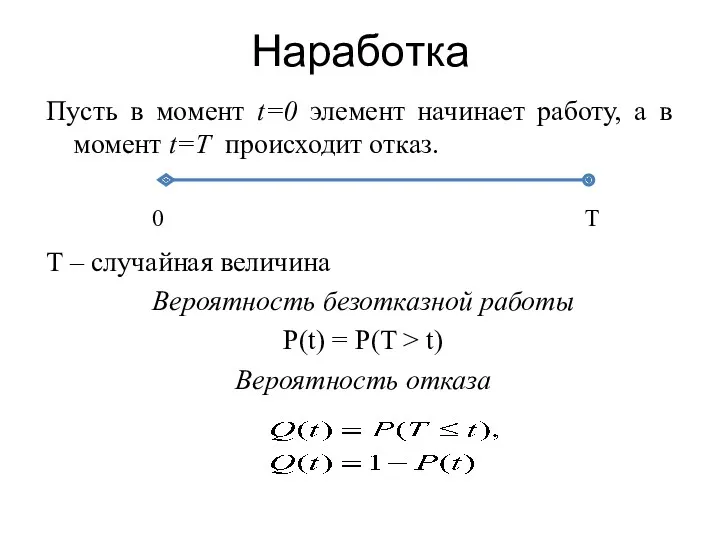 Теория надежности. Вероятность безотказной работы и вероятность отказа. Распределение Вейбулла
Теория надежности. Вероятность безотказной работы и вероятность отказа. Распределение Вейбулла Математические олимпийские игры
Математические олимпийские игры Урок математики
Урок математики 1 класс презентация к уроку Уравнение
1 класс презентация к уроку Уравнение Итоговый тест по математике
Итоговый тест по математике Аналитическая геометрия в пространстве. Плоскость и прямая в пространстве
Аналитическая геометрия в пространстве. Плоскость и прямая в пространстве Функции y=sinx, y=cosx. Свойства. Преобразование графиков
Функции y=sinx, y=cosx. Свойства. Преобразование графиков Подготовка к ГИА по математике. Задания 16
Подготовка к ГИА по математике. Задания 16 Презентация к уроку русского языка в 4 классе Неопределённая форма глагола
Презентация к уроку русского языка в 4 классе Неопределённая форма глагола ГИА - 2015 Модуль Алгебра
ГИА - 2015 Модуль Алгебра Замечательные кривые в математике
Замечательные кривые в математике Усвоение грамматических форм языка на занятиях по математике
Усвоение грамматических форм языка на занятиях по математике Скорость. Время. Расстояние.
Скорость. Время. Расстояние. Перпендикулярность прямой и плоскости. Задания для устного счета. Упражнение 7
Перпендикулярность прямой и плоскости. Задания для устного счета. Упражнение 7 Подготовка к ЕГЭ по математике. Базовый уровень Сложные задачи
Подготовка к ЕГЭ по математике. Базовый уровень Сложные задачи Скалярное произведение векторов
Скалярное произведение векторов Дискретна математика. Декартів добуток множин
Дискретна математика. Декартів добуток множин Число-9
Число-9 Декартова система координат в пространстве
Декартова система координат в пространстве