Структурные схемы системы автоматического управления (САУ). Автоматизированное управление ХТС. Лекция 3 презентация
- Структурные схемы системы автоматического управления (САУ). Автоматизированное управление ХТС. Лекция 3

Содержание
- 2. Различают следующие структуры САУ: алгоритмическая, функциональная и конструктивная. Под алгоритмической структурой САУ понимают структуру, в которой
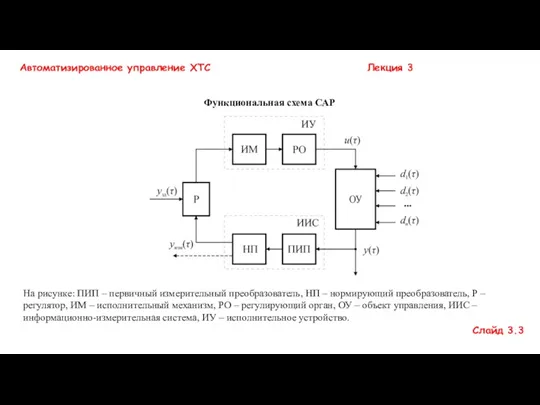
- 3. Автоматизированное управление ХТС Лекция 3 Функциональная схема САР На рисунке: ПИП – первичный измерительный преобразователь, НП
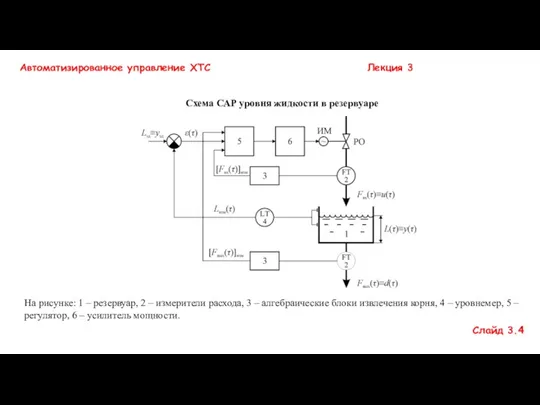
- 4. Автоматизированное управление ХТС Лекция 3 Схема САР уровня жидкости в резервуаре На рисунке: 1 – резервуар,
- 5. Автоматизированное управление ХТС Лекция 3 Функциональная схема САР уровня жидкости в резервуаре На рисунке: 1 –
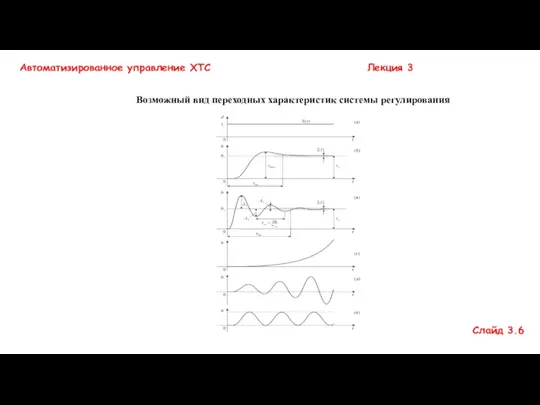
- 6. Автоматизированное управление ХТС Лекция 3 Возможный вид переходных характеристик системы регулирования Слайд 3.6
- 7. При синтезе системы управления ключевой проблемой является обеспечение ее устойчивости. При исследовании линейных систем пользуются двумя
- 8. Устойчивость является необходимым, но не достаточным условием пригодности систем управления. Качество систем управления оценивается также по
- 9. Показатели, характеризующие точность регулирования точность регулирования определяется разницей между заданным и текущим значением регулируемого параметра, т.
- 10. Показатели, характеризующие быстродействие Время переходного процесса (время регулирования) τпп — это продолжительность переходного процесса, охватывающего временной
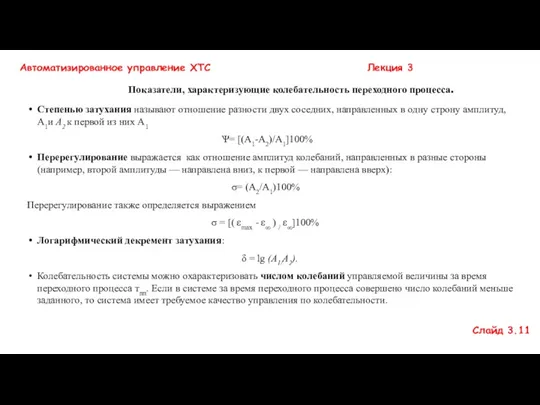
- 11. Показатели, характеризующие колебательность переходного процесса. Степенью затухания называют отношение разности двух соседних, направленных в одну строну
- 12. Интегральные показатели качества регулирования Интеграл от Модуля Ошибки (ИМО) Интеграл от взвешенного по времени Модуля Ошибки
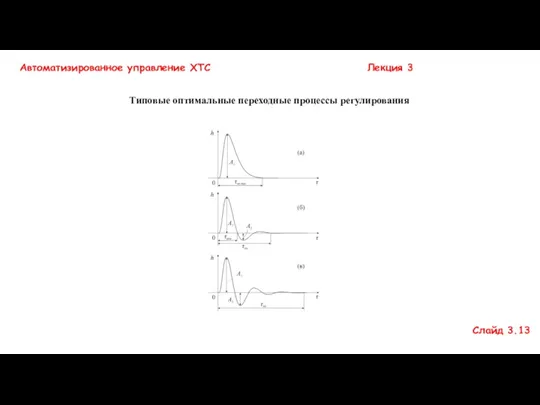
- 13. Автоматизированное управление ХТС Лекция 3 Типовые оптимальные переходные процессы регулирования Слайд 3.13
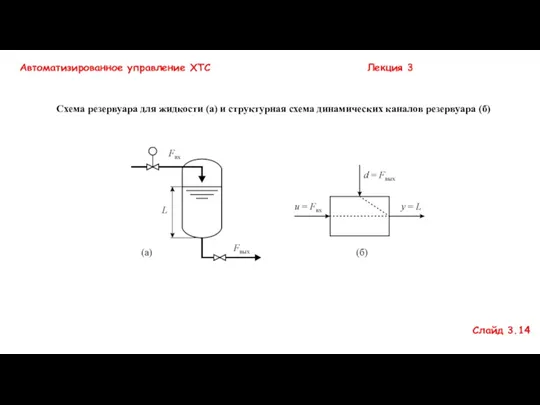
- 14. Автоматизированное управление ХТС Лекция 3 Схема резервуара для жидкости (а) и структурная схема динамических каналов резервуара
- 16. Скачать презентацию
Различают следующие структуры САУ: алгоритмическая, функциональная и конструктивная.
Под алгоритмической структурой САУ
Различают следующие структуры САУ: алгоритмическая, функциональная и конструктивная.
Под алгоритмической структурой САУ
Автоматизированное управление ХТС Лекция 3
Функциональная схема САР
На рисунке: ПИП – первичный
Автоматизированное управление ХТС Лекция 3
Функциональная схема САР
На рисунке: ПИП – первичный
Автоматизированное управление ХТС Лекция 3
Схема САР уровня жидкости в резервуаре
На рисунке:
Автоматизированное управление ХТС Лекция 3
Схема САР уровня жидкости в резервуаре
На рисунке:

Автоматизированное управление ХТС Лекция 3
Функциональная схема САР уровня жидкости в резервуаре
На
Автоматизированное управление ХТС Лекция 3
Функциональная схема САР уровня жидкости в резервуаре
На
Автоматизированное управление ХТС Лекция 3
Возможный вид переходных характеристик системы регулирования
Слайд 3.6
Автоматизированное управление ХТС Лекция 3
Возможный вид переходных характеристик системы регулирования
Слайд 3.6
При синтезе системы управления ключевой проблемой является обеспечение ее устойчивости.
При исследовании
При синтезе системы управления ключевой проблемой является обеспечение ее устойчивости.
При исследовании
Устойчивость является необходимым, но не достаточным условием пригодности систем управления.
Качество
Устойчивость является необходимым, но не достаточным условием пригодности систем управления.
Качество
Показатели, характеризующие точность регулирования
точность регулирования определяется разницей между заданным и текущим
Показатели, характеризующие точность регулирования
точность регулирования определяется разницей между заданным и текущим
Показатели, характеризующие быстродействие
Время переходного процесса (время регулирования) τпп — это продолжительность
Показатели, характеризующие быстродействие
Время переходного процесса (время регулирования) τпп — это продолжительность
Показатели, характеризующие колебательность переходного процесса.
Степенью затухания называют отношение разности двух соседних,
Показатели, характеризующие колебательность переходного процесса.
Степенью затухания называют отношение разности двух соседних,
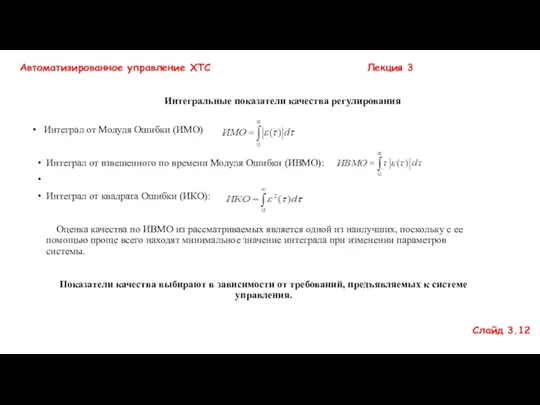
Интегральные показатели качества регулирования
Интеграл от Модуля Ошибки (ИМО)
Интеграл от взвешенного
Интегральные показатели качества регулирования
Интеграл от Модуля Ошибки (ИМО)
Интеграл от взвешенного
Автоматизированное управление ХТС Лекция 3
Типовые оптимальные переходные процессы регулирования
Слайд 3.13
Автоматизированное управление ХТС Лекция 3
Типовые оптимальные переходные процессы регулирования
Слайд 3.13
Автоматизированное управление ХТС Лекция 3
Схема резервуара для жидкости (а) и структурная
Автоматизированное управление ХТС Лекция 3
Схема резервуара для жидкости (а) и структурная
 Кузов. Диагностика двигателя, электрики, ходовой
Кузов. Диагностика двигателя, электрики, ходовой Демієлінізуючі захворювання нервової системи (бічний аміотрофічний склероз, розсіяний склероз)
Демієлінізуючі захворювання нервової системи (бічний аміотрофічний склероз, розсіяний склероз) План воспитательной работы.
План воспитательной работы. Городецкая роспись
Городецкая роспись Кафе Встреча
Кафе Встреча Творчество В.Г. Перова
Творчество В.Г. Перова Огород на окне. Педагогический проект
Огород на окне. Педагогический проект Устройство и ремонт асинхронного электродвигателя с короткозамкнутым ротором
Устройство и ремонт асинхронного электродвигателя с короткозамкнутым ротором Здание гостиницы Амур
Здание гостиницы Амур ҰБТ-ға баратын оқушыларға психологиялық көмек беру жолдары
ҰБТ-ға баратын оқушыларға психологиялық көмек беру жолдары Многофункциональное пособие
Многофункциональное пособие 249633
249633 презентация на тему:Красная книга народов России к уроку Население России
презентация на тему:Красная книга народов России к уроку Население России Атрибуция музейного предмета
Атрибуция музейного предмета Класс Млекопитающие
Класс Млекопитающие Презентация для родителей Речевое развитие одно из главных показателей готовности ребёнка к обучению в школе.
Презентация для родителей Речевое развитие одно из главных показателей готовности ребёнка к обучению в школе. Измерения при испытаниях холодильного оборудования. Роль измерении в холодильной технике
Измерения при испытаниях холодильного оборудования. Роль измерении в холодильной технике Диагностика и лечение эпилепсии
Диагностика и лечение эпилепсии Инженерные коммуникации в доме. 8 класс
Инженерные коммуникации в доме. 8 класс Профилактика агрессивного поведения подростков: гендерный аспект
Профилактика агрессивного поведения подростков: гендерный аспект Основные условные графические обозначения и изображения элементов генерального плана и сооружений транспорта
Основные условные графические обозначения и изображения элементов генерального плана и сооружений транспорта Методическая система Модель химического образования на основе технологического подхода
Методическая система Модель химического образования на основе технологического подхода Видеоролик
Видеоролик Маркетинг план
Маркетинг план Лагерь труда и отдыха ВИТА Оргетской общеобразовательной школы имени Т.И. Петрова
Лагерь труда и отдыха ВИТА Оргетской общеобразовательной школы имени Т.И. Петрова Адамның даму кезеңдері
Адамның даму кезеңдері Дизартрия
Дизартрия Основные аспекты логопедической работы в коррекционной школе VII и VIII вида
Основные аспекты логопедической работы в коррекционной школе VII и VIII вида