- Проекция силы на ось и на плоскость

Содержание
- 2. Опр. Проекцией силы (или любого другого вектора) на ось Ох называется алгебраическая величина Fх , равная
- 3. Модуль проекции Опр. Проекция силы на плоскость Оху - вектор Fz Проекция силы на плоскость. Проекции
- 4. А) Пространственный случай. Пусть заданы проекции силы F на оси координат Fх , Fу , F
- 5. Б) Плоский случай. Пусть заданы проекции силы F на оси координат Fх , Fу . Модуль
- 6. Пусть силы Вычислив Rх , Rу , R z , найдем модуль Тогда, в соответствии с
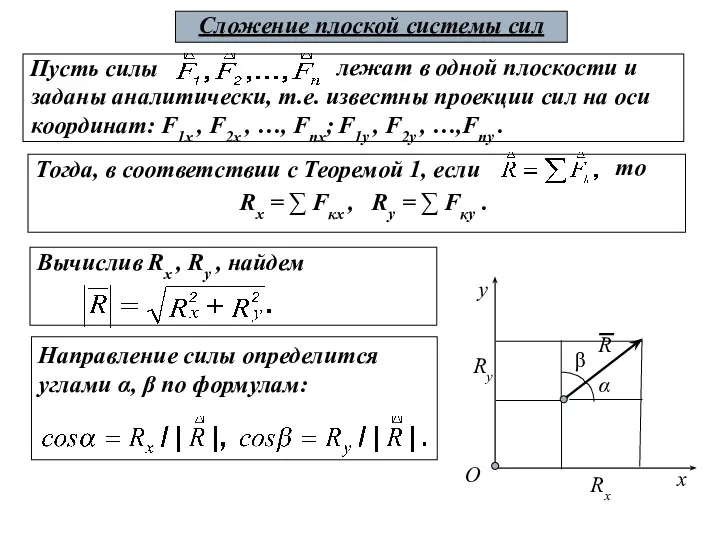
- 7. Пусть силы Тогда, в соответствии с Теоремой 1, если Сложение плоской системы сил Rх = ∑
- 8. 3. Равновесие сходящейся системы сил Для равновесия сходящейся системы сил, приложенной к твердому телу, необходимо и
- 9. Вывод. Для равновесия сходящейся системы сил необходимо и достаточно, чтобы силовой многоугольник, построенный на этих силах
- 10. Известно, что Rх = ∑ Fкх , Rу = ∑ Fку , Rz = ∑ Fкz
- 11. Случай плоской сходящейся системы сил Если все действующие на тело сходящиеся силы лежат в одной плоскости,
- 12. Теорема о трех силах Теорема. Если твердое тело находится в равновесии под действием трех непараллельных сил,
- 13. В точке D свободное опирание на выступ. Реакция опоры D направлена перпендикулярно к балке АВ в
- 14. Замечание 1. Рассмотренный ниже алгоритм решения задач на равновесие применяется не только для систем сходящихся, но
- 15. 5. Определение искомых величин, проверка правильности решений и исследование полученных результатов. 4. Составление уравнений равновесия для
- 16. Груз весом Р лежит на гладкой наклонной плоскости с углом наклона α. Определить значение которую надо
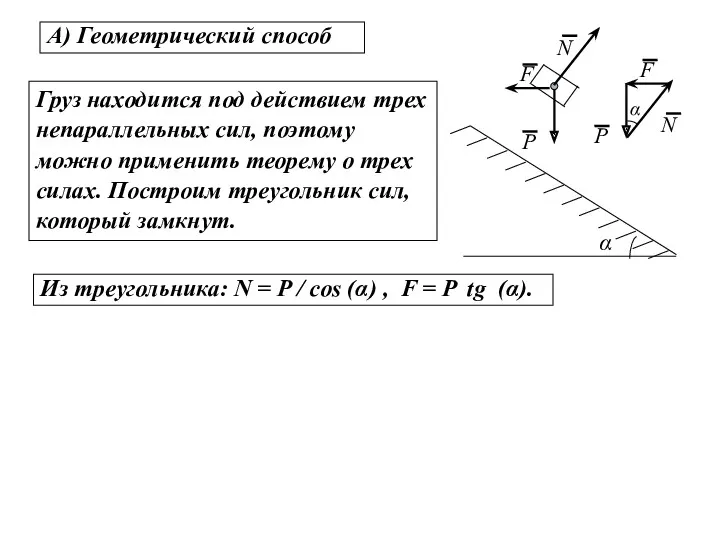
- 17. А) Геометрический способ Груз находится под действием трех непараллельных сил, поэтому можно применить теорему о трех
- 19. Скачать презентацию
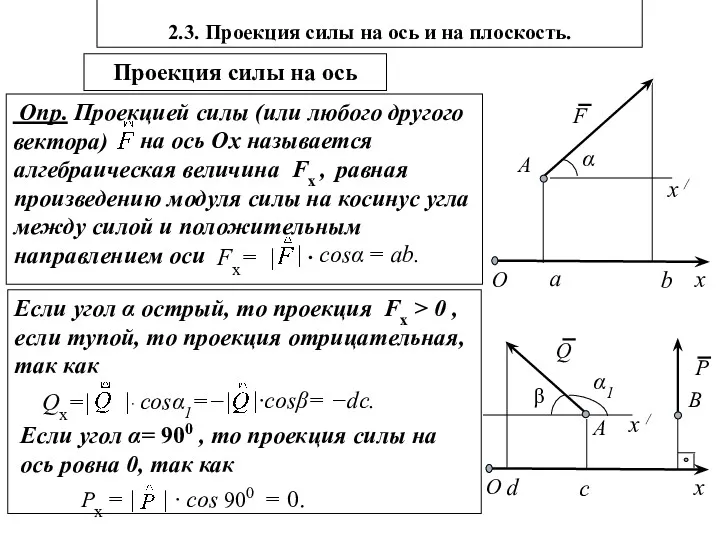
Опр. Проекцией силы (или любого другого вектора)
на ось Ох
Опр. Проекцией силы (или любого другого вектора)
на ось Ох
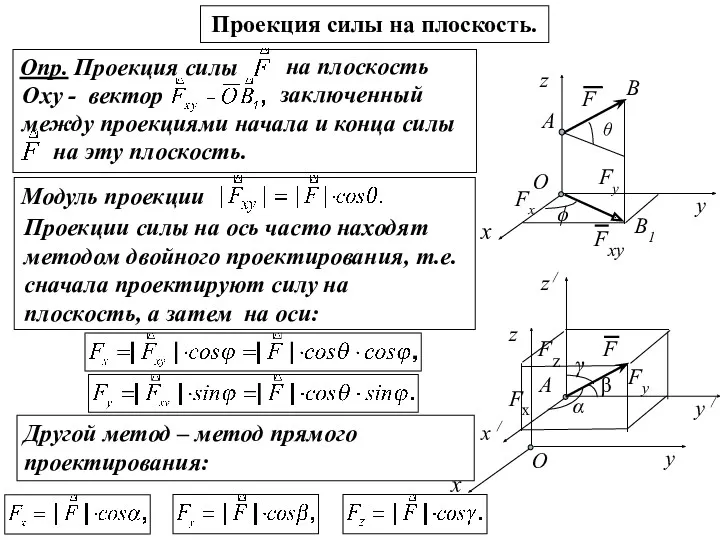
Модуль проекции
Опр. Проекция силы
на плоскость Оху - вектор
Fz
Проекция силы
Модуль проекции
Опр. Проекция силы
на плоскость Оху - вектор
Fz
Проекция силы
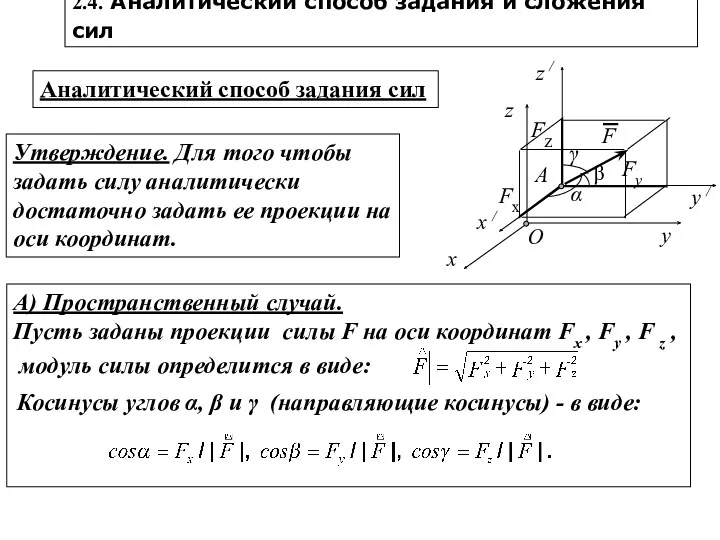
А) Пространственный случай.
Пусть заданы проекции силы F на оси координат Fх
А) Пространственный случай.
Пусть заданы проекции силы F на оси координат Fх
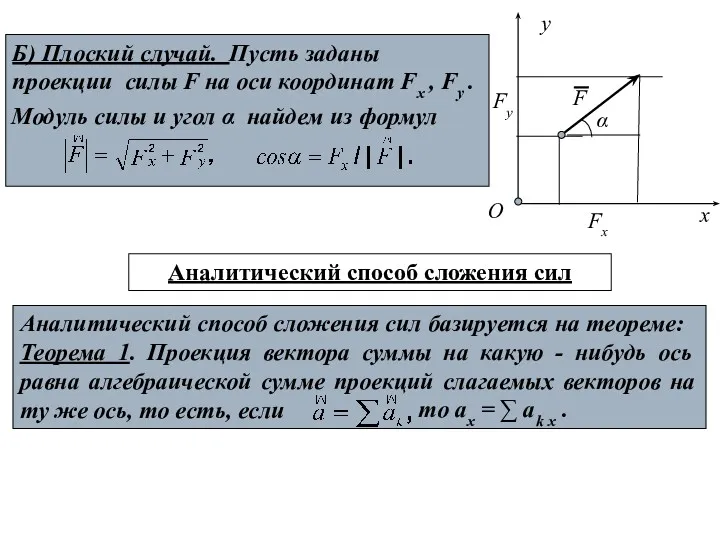
Б) Плоский случай. Пусть заданы проекции силы F на оси координат
Б) Плоский случай. Пусть заданы проекции силы F на оси координат
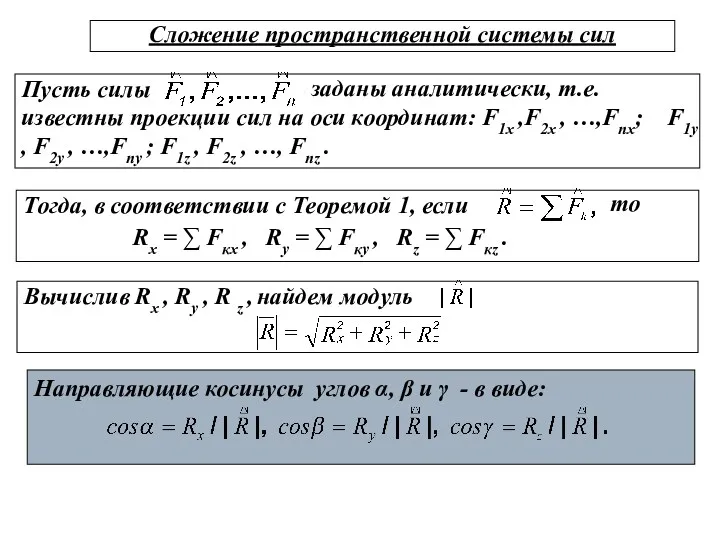
Пусть силы
Вычислив Rх , Rу , R z , найдем модуль
Пусть силы
Вычислив Rх , Rу , R z , найдем модуль
Пусть силы
Тогда, в соответствии с Теоремой 1, если
Сложение плоской системы сил
Пусть силы
Тогда, в соответствии с Теоремой 1, если
Сложение плоской системы сил
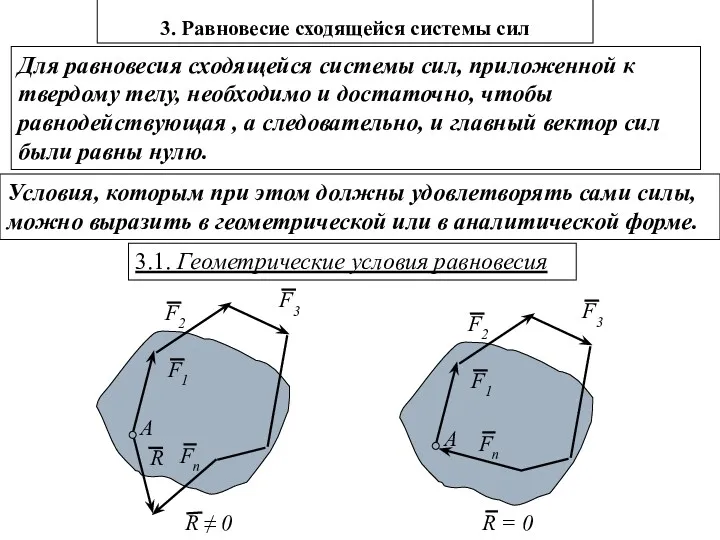
3. Равновесие сходящейся системы сил
Для равновесия сходящейся системы сил, приложенной
3. Равновесие сходящейся системы сил
Для равновесия сходящейся системы сил, приложенной
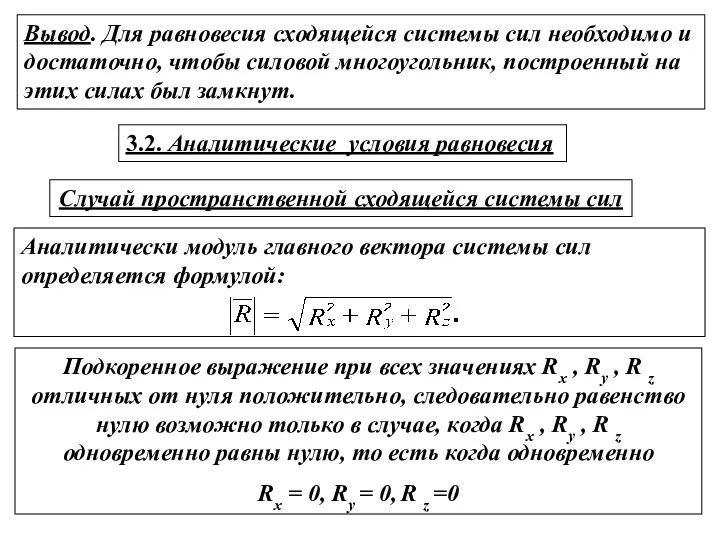
Вывод. Для равновесия сходящейся системы сил необходимо и достаточно, чтобы силовой
Вывод. Для равновесия сходящейся системы сил необходимо и достаточно, чтобы силовой
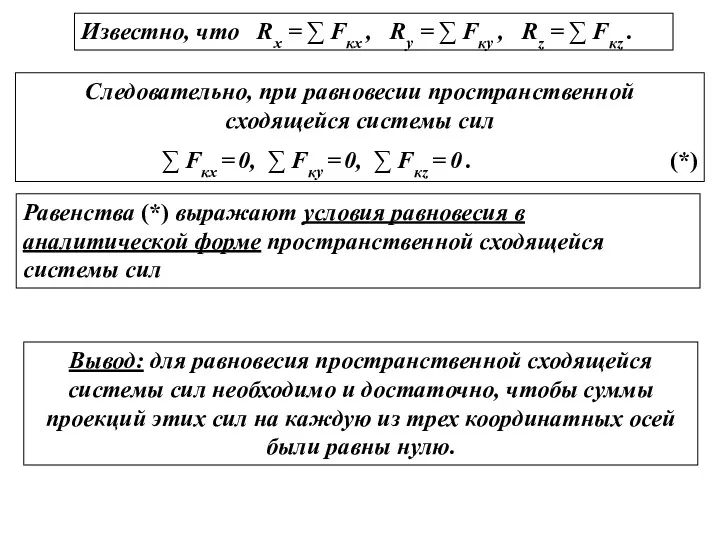
Известно, что Rх = ∑ Fкх , Rу = ∑ Fку
Известно, что Rх = ∑ Fкх , Rу = ∑ Fку
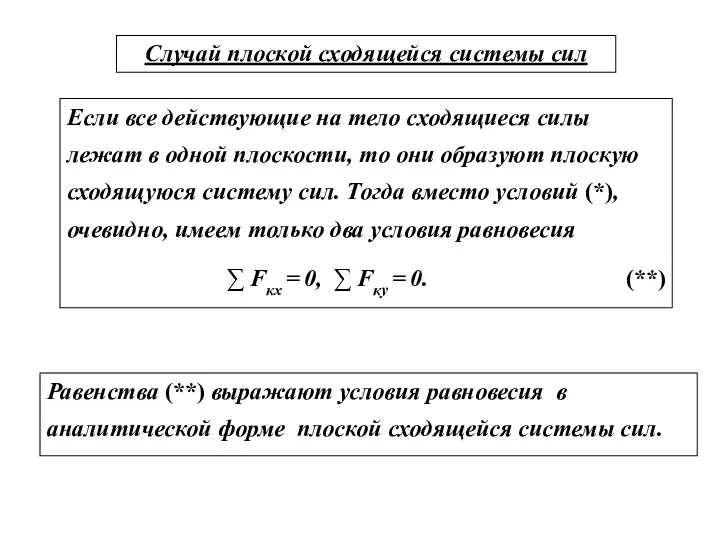
Случай плоской сходящейся системы сил
Если все действующие на тело сходящиеся силы
Случай плоской сходящейся системы сил
Если все действующие на тело сходящиеся силы
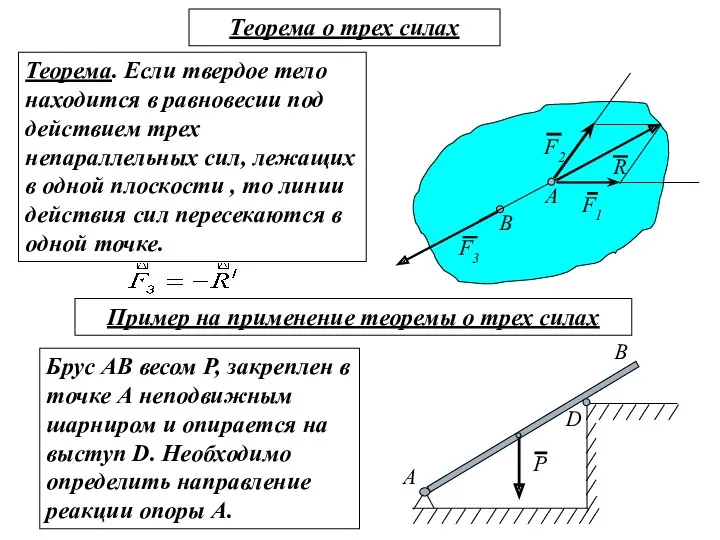
Теорема о трех силах
Теорема. Если твердое тело находится в равновесии под
Теорема о трех силах
Теорема. Если твердое тело находится в равновесии под
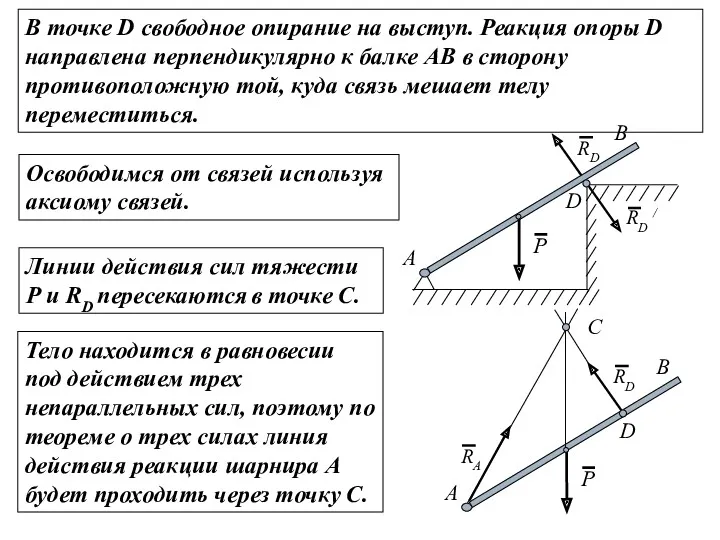
В точке D свободное опирание на выступ. Реакция опоры D направлена
В точке D свободное опирание на выступ. Реакция опоры D направлена
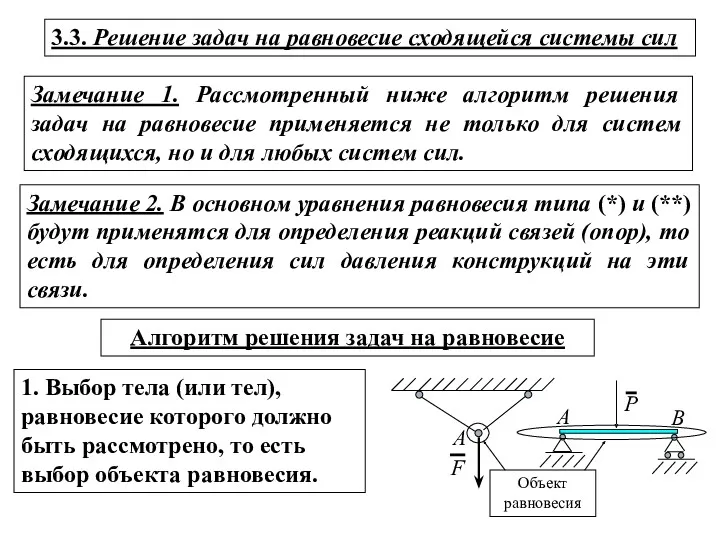
Замечание 1. Рассмотренный ниже алгоритм решения задач на равновесие применяется не
Замечание 1. Рассмотренный ниже алгоритм решения задач на равновесие применяется не
5. Определение искомых величин, проверка правильности решений и исследование полученных результатов.
4.
5. Определение искомых величин, проверка правильности решений и исследование полученных результатов.
4.
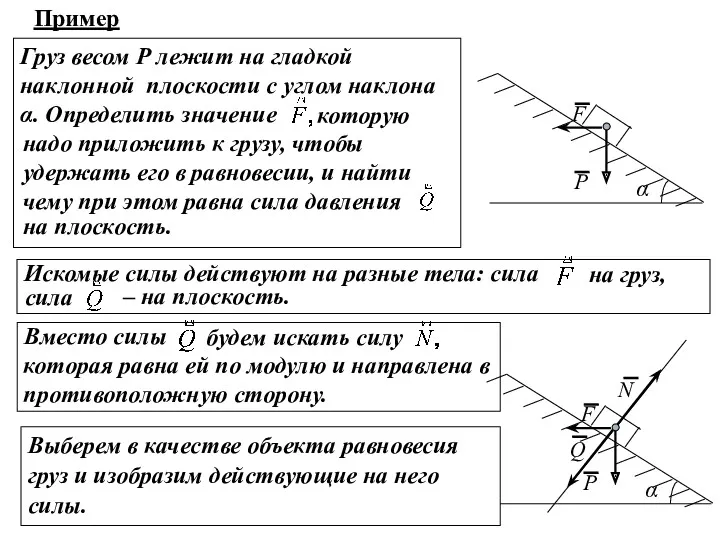
Груз весом Р лежит на гладкой наклонной плоскости с углом наклона
Груз весом Р лежит на гладкой наклонной плоскости с углом наклона
А) Геометрический способ
Груз находится под действием трех непараллельных сил, поэтому можно
А) Геометрический способ
Груз находится под действием трех непараллельных сил, поэтому можно
 Презентация к уроку Сила упругости. Закон Гука. в 7 классе
Презентация к уроку Сила упругости. Закон Гука. в 7 классе Метрология. Шероховатость поверхности деталей
Метрология. Шероховатость поверхности деталей Тліючий розряд
Тліючий розряд Линзы. Построение изображений в линзах
Линзы. Построение изображений в линзах Электропривод и его функциональная схема. Введение в дисциплину
Электропривод и его функциональная схема. Введение в дисциплину магнитные явления
магнитные явления ультразвук презинтация
ультразвук презинтация Магнитное поле Земли
Магнитное поле Земли Учимся переводить в СИ. презентация для учеников 7 класса.
Учимся переводить в СИ. презентация для учеников 7 класса. Второй закон Ньютона
Второй закон Ньютона Способи вивільнення ядерної енергії. 11 клас
Способи вивільнення ядерної енергії. 11 клас Electric Potential. Energy and Electric Potential. Lecture 4
Electric Potential. Energy and Electric Potential. Lecture 4 Потенциал. Решение задач
Потенциал. Решение задач Электромагнитная индукция. Переменный ток. Электромагнитные волны
Электромагнитная индукция. Переменный ток. Электромагнитные волны Конкурс Физические опыты
Конкурс Физические опыты Викторина для 11 класса
Викторина для 11 класса Магнитное поле. Индукция магнитного поля. Сила, действующая на проводник с током в магнитном поле. Сила Ампера
Магнитное поле. Индукция магнитного поля. Сила, действующая на проводник с током в магнитном поле. Сила Ампера Презентация Силы в природе
Презентация Силы в природе Количество теплоты. Единицы количества теплоты. Удельная теплоемкость
Количество теплоты. Единицы количества теплоты. Удельная теплоемкость Закон сохранения механической энергии. Работа силы. Мощность
Закон сохранения механической энергии. Работа силы. Мощность Электрический ток в жидкостях. Электролитическая диссоциация
Электрический ток в жидкостях. Электролитическая диссоциация От физики к геофизике
От физики к геофизике Понятие и принципы построения математической модели физических систем
Понятие и принципы построения математической модели физических систем Тормозная рычажная передача электровоза ВЛ 80
Тормозная рычажная передача электровоза ВЛ 80 Конвекційний теплообмін
Конвекційний теплообмін Газовые законы
Газовые законы Билеты. Кислородного баллона
Билеты. Кислородного баллона Электрический ток в вакууме. Диод
Электрический ток в вакууме. Диод