- Оптимальное проектирование на основе решения задачи линейного программирования

Содержание
- 2. Поэтому в наиболее общей форме задачу линейного программирования можно сформулировать следующим образом: Здесь (1) – система
- 3. Решения, удовлетворяющие системе ограничений (1) условий задачи и требования неотрицательности переменных (2) называются допустимыми Решения, удовлетворяющие
- 4. Правило приведения ЗЛП к каноническому виду В каждое из неравенств вводится своя «уравнивающая» переменная, после чего
- 5. 3. Если в ограничениях правая часть отрицательная, то следует умножить это ограничение на (-1)
- 6. 7.2. Симплекс-метод и основные утверждения линейного программирования Геометрическая интерпретация ЗЛП и метода ее решения для двух
- 7. 5 20 15 10 5 10 15 20 0 C B A 8 12
- 8. Множество точек называется выпуклым, если вместе с его двумя любыми точками ему принадлежит и весь отрезок,
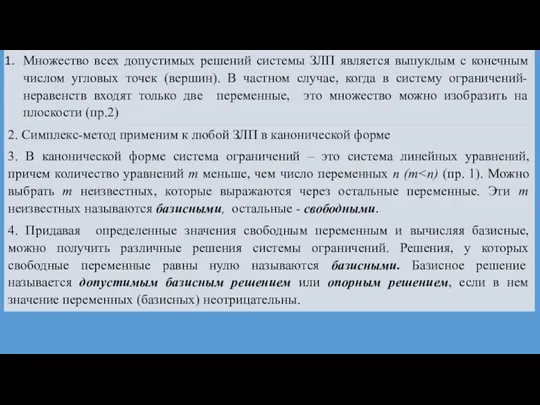
- 9. Множество всех допустимых решений системы ЗЛП является выпуклым с конечным числом угловых точек (вершин). В частном
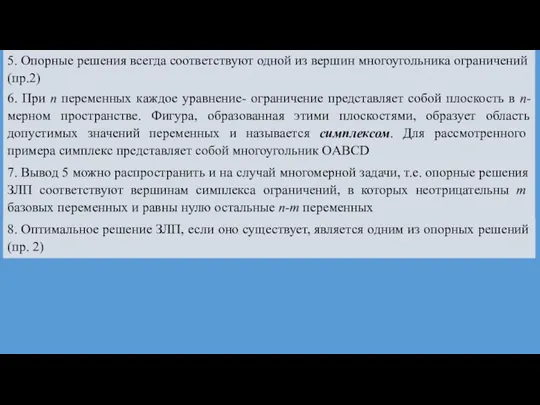
- 10. 5. Опорные решения всегда соответствуют одной из вершин многоугольника ограничений (пр.2) 6. При n переменных каждое
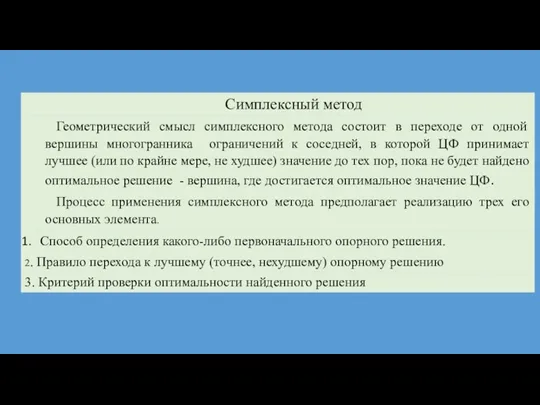
- 11. Симплексный метод Геометрический смысл симплексного метода состоит в переходе от одной вершины многогранника ограничений к соседней,
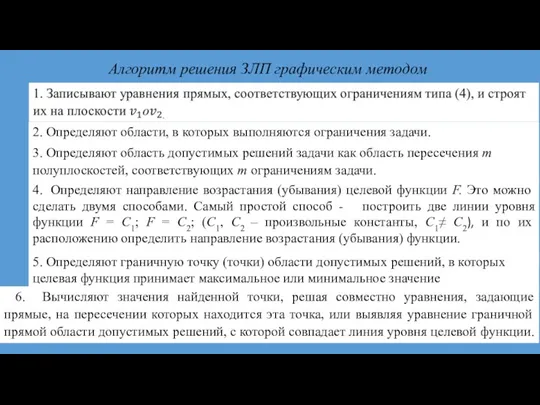
- 12. Алгоритм решения ЗЛП графическим методом 2. Определяют области, в которых выполняются ограничения задачи. 3. Определяют область
- 13. Возможны следующие варианты областей допустимых решений а - единственное решение – точка В, бесконечно много решений
- 14. 9. Оптимальное проектирование на основе решения задачи нелинейного программирования 9.1. Общие сведения Нелинейное программирование (НП) –
- 15. Поиск минимума в n-мерном пространстве осуществляется итерационными методами. На каждой итерации необходимо решить две задачи: 1
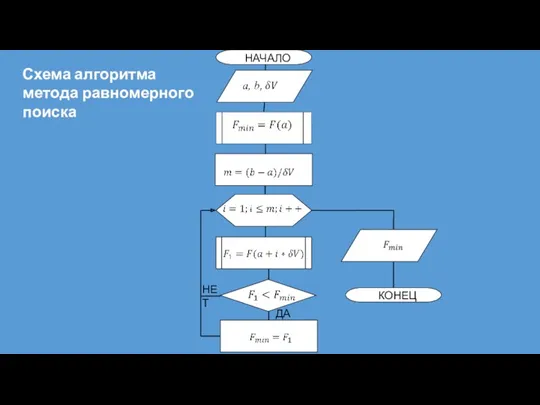
- 17. 8.2.1. Метод равномерного поиска Метод используется для грубого определения максимума (минимума) или для исследования поведения функции
- 18. НЕТ ДА Схема алгоритма метода равномерного поиска
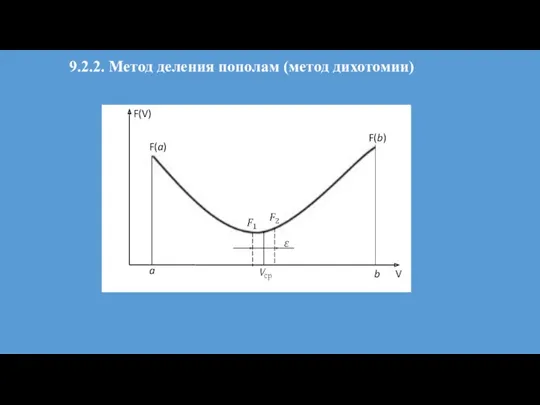
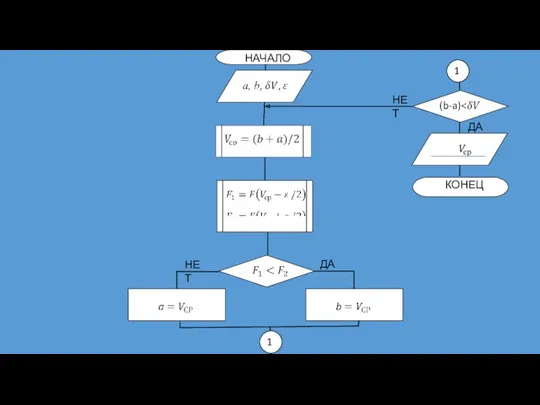
- 19. 9.2.2. Метод деления пополам (метод дихотомии)
- 20. НЕТ НЕТ ДА ДА
- 21. Так при m = 10 это выигрыш составит 3,2, т.е. в 3,2 раза ИН в методе
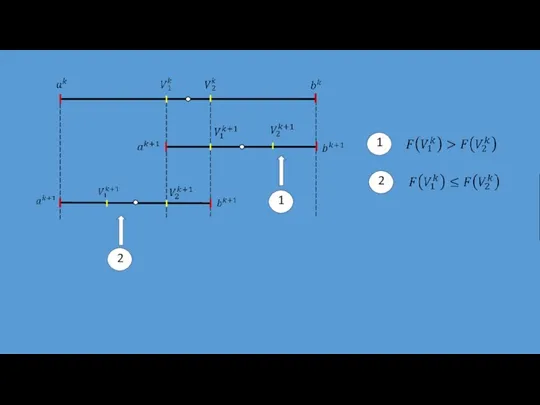
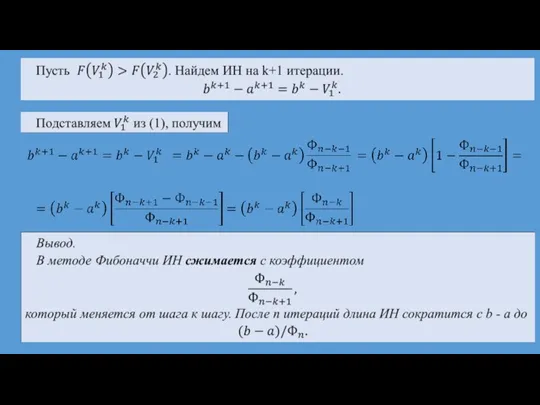
- 23. 9.2.3. Метод Фибоначчи где n – заданное общее число вычислений функции.
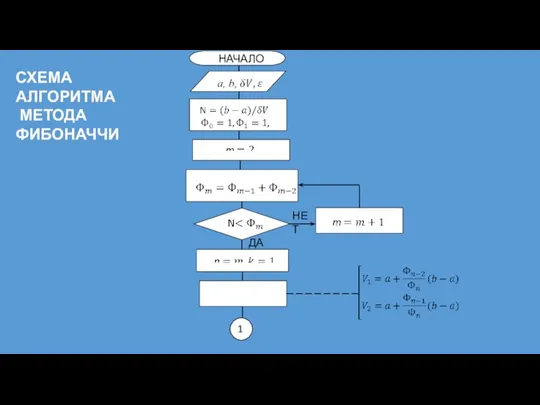
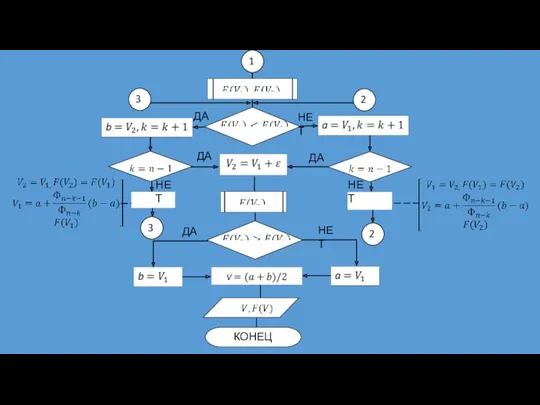
- 26. НЕТ ДА СХЕМА АЛГОРИТМА МЕТОДА ФИБОНАЧЧИ
- 27. ДА ДА ДА ДА НЕТ НЕТ НЕТ НЕТ
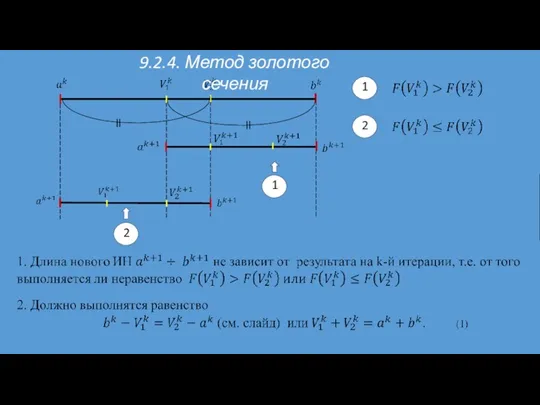
- 28. 9.2.4. Метод золотого сечения
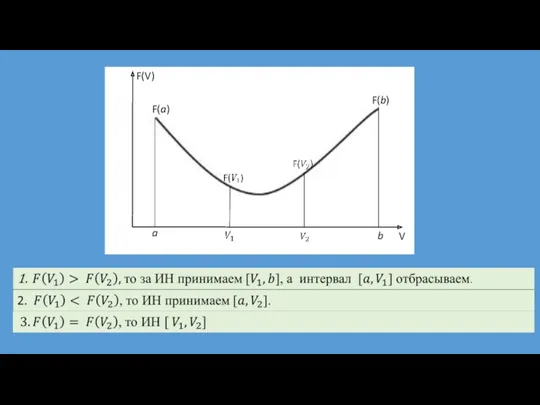
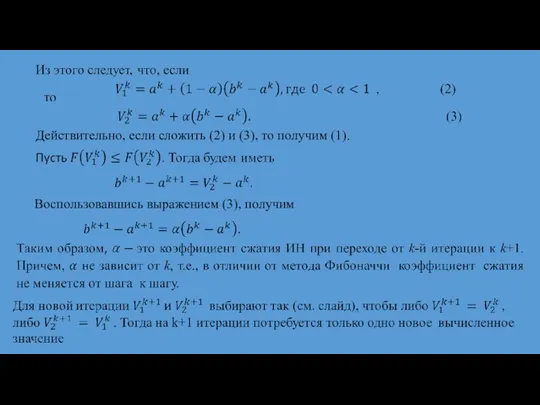
- 29. Действительно, если сложить (2) и (3), то получим (1). Воспользовавшись выражением (3), получим
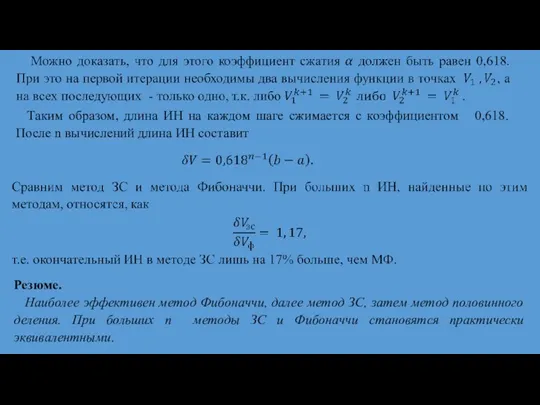
- 30. Таким образом, длина ИН на каждом шаге сжимается с коэффициентом 0,618. После n вычислений длина ИН
- 31. СХЕМА АЛГОРИТМА МЕТОДА ЗОЛОТОГО СЕЧЕНИЯ ДА НЕТ ДА ДА НЕТ НЕТ
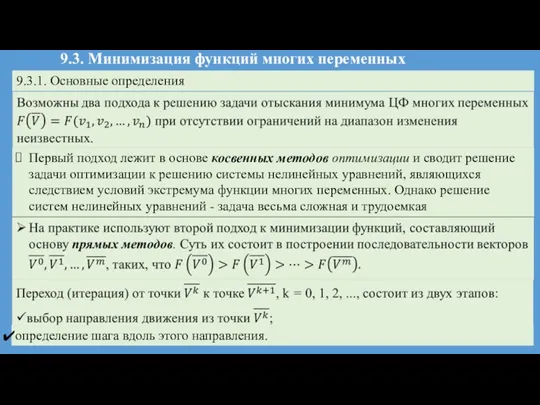
- 32. 9.3. Минимизация функций многих переменных 9.3.1. Основные определения Первый подход лежит в основе косвенных методов оптимизации
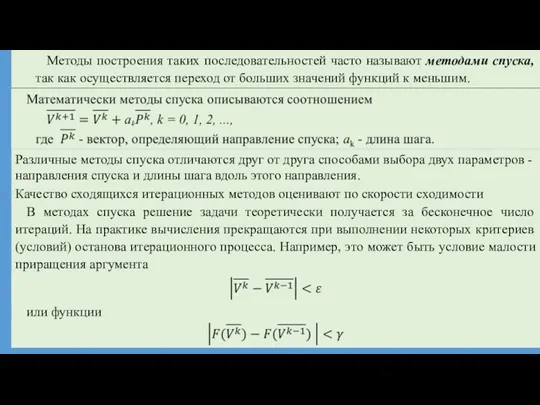
- 33. Методы построения таких последовательностей часто называют методами спуска, так как осуществляется переход от больших значений функций
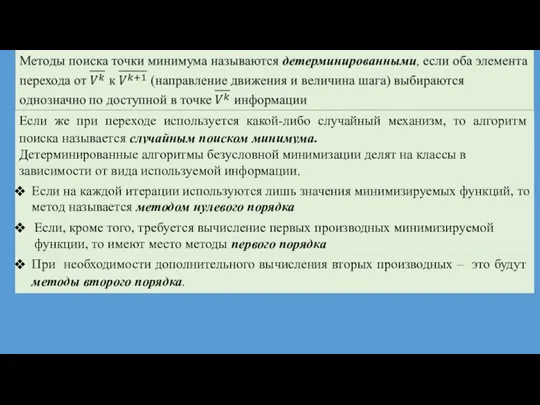
- 34. Если же при переходе используется какой-либо случайный механизм, то алгоритм поиска называется случайным поиском минимума. Детерминированные
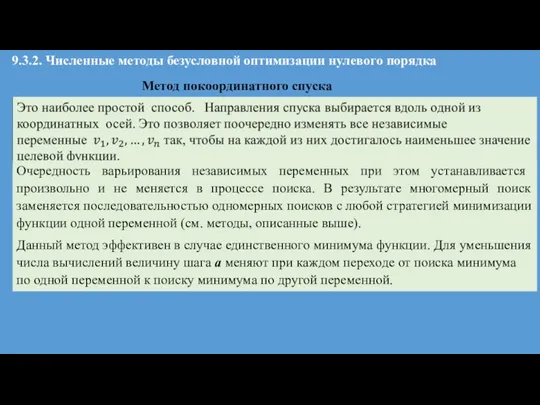
- 35. 9.3.2. Численные методы безусловной оптимизации нулевого порядка Метод покоординатного спуска Очередность варьирования независимых переменных при этом
- 37. Скачать презентацию
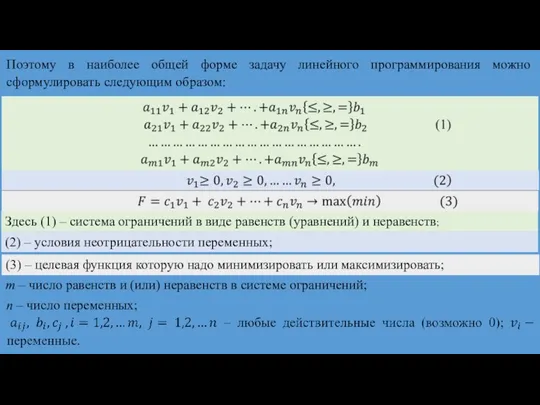
Поэтому в наиболее общей форме задачу линейного программирования можно сформулировать следующим
Поэтому в наиболее общей форме задачу линейного программирования можно сформулировать следующим
Решения, удовлетворяющие системе ограничений (1) условий задачи и требования неотрицательности переменных
Решения, удовлетворяющие системе ограничений (1) условий задачи и требования неотрицательности переменных
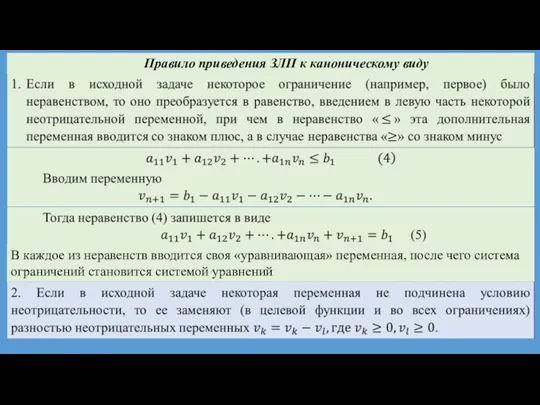
Правило приведения ЗЛП к каноническому виду
В каждое из неравенств вводится своя
Правило приведения ЗЛП к каноническому виду
В каждое из неравенств вводится своя

3. Если в ограничениях правая часть отрицательная, то следует умножить это
3. Если в ограничениях правая часть отрицательная, то следует умножить это

7.2. Симплекс-метод и основные утверждения линейного программирования
Геометрическая интерпретация ЗЛП и метода
7.2. Симплекс-метод и основные утверждения линейного программирования
Геометрическая интерпретация ЗЛП и метода

5
20
15
10
5
10
15
20
0
C
B
A
8
12
5
20
15
10
5
10
15
20
0
C
B
A
8
12
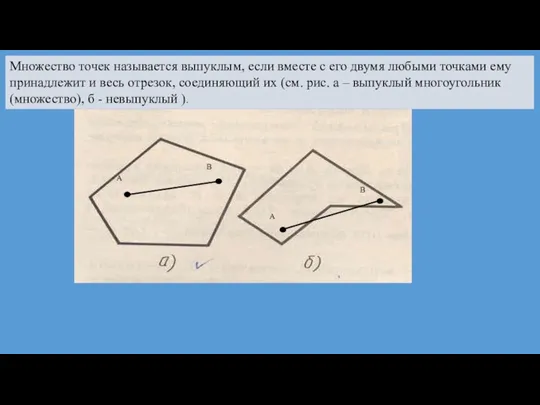
Множество точек называется выпуклым, если вместе с его двумя любыми точками
Множество точек называется выпуклым, если вместе с его двумя любыми точками
Множество всех допустимых решений системы ЗЛП является выпуклым с конечным числом
Множество всех допустимых решений системы ЗЛП является выпуклым с конечным числом
5. Опорные решения всегда соответствуют одной из вершин многоугольника ограничений (пр.2)
6.
5. Опорные решения всегда соответствуют одной из вершин многоугольника ограничений (пр.2)
6.
Симплексный метод
Геометрический смысл симплексного метода состоит в переходе от одной вершины
Симплексный метод
Геометрический смысл симплексного метода состоит в переходе от одной вершины
Алгоритм решения ЗЛП графическим методом
2. Определяют области, в которых выполняются ограничения
Алгоритм решения ЗЛП графическим методом
2. Определяют области, в которых выполняются ограничения
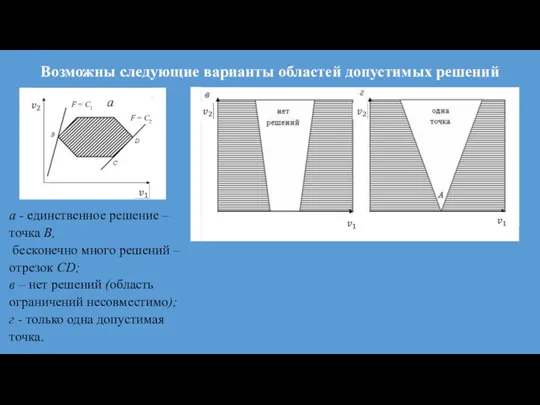
Возможны следующие варианты областей допустимых решений
а - единственное решение –
Возможны следующие варианты областей допустимых решений
а - единственное решение –
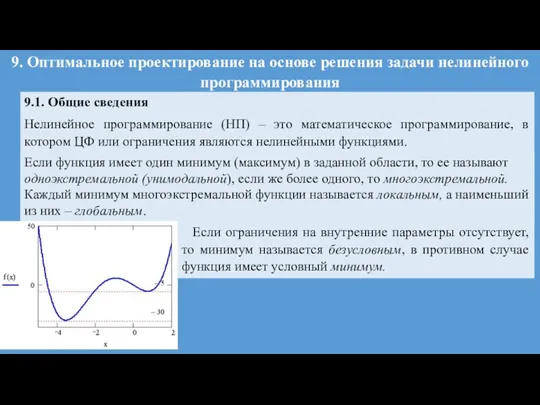
9. Оптимальное проектирование на основе решения задачи нелинейного программирования
9.1. Общие сведения
Нелинейное
9. Оптимальное проектирование на основе решения задачи нелинейного программирования
9.1. Общие сведения
Нелинейное
Поиск минимума в n-мерном пространстве осуществляется итерационными методами. На каждой итерации
Поиск минимума в n-мерном пространстве осуществляется итерационными методами. На каждой итерации

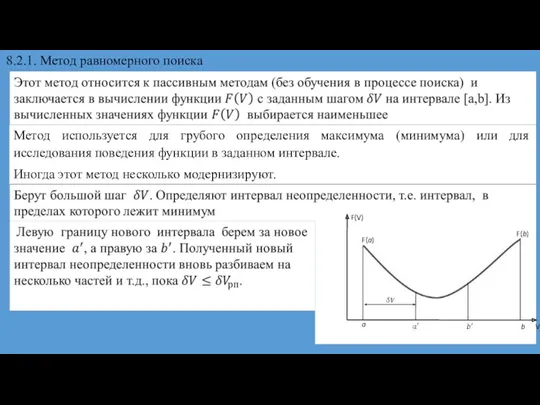
8.2.1. Метод равномерного поиска
Метод используется для грубого определения максимума (минимума)
8.2.1. Метод равномерного поиска
Метод используется для грубого определения максимума (минимума)
НЕТ
ДА
Схема алгоритма метода равномерного поиска
НЕТ
ДА
Схема алгоритма метода равномерного поиска
9.2.2. Метод деления пополам (метод дихотомии)
9.2.2. Метод деления пополам (метод дихотомии)
НЕТ
НЕТ
ДА
ДА
НЕТ
НЕТ
ДА
ДА

Так при m = 10 это выигрыш составит 3,2, т.е. в
Так при m = 10 это выигрыш составит 3,2, т.е. в

9.2.3. Метод Фибоначчи
где n – заданное общее число вычислений функции.
9.2.3. Метод Фибоначчи
где n – заданное общее число вычислений функции.
НЕТ
ДА
СХЕМА АЛГОРИТМА
МЕТОДА ФИБОНАЧЧИ
НЕТ
ДА
СХЕМА АЛГОРИТМА
МЕТОДА ФИБОНАЧЧИ
ДА
ДА
ДА
ДА
НЕТ
НЕТ
НЕТ
НЕТ
ДА
ДА
ДА
ДА
НЕТ
НЕТ
НЕТ
НЕТ
9.2.4. Метод золотого сечения
9.2.4. Метод золотого сечения
Действительно, если сложить (2) и (3), то получим (1).
Воспользовавшись выражением (3),
Действительно, если сложить (2) и (3), то получим (1).
Воспользовавшись выражением (3),
Таким образом, длина ИН на каждом шаге сжимается с коэффициентом 0,618.
Таким образом, длина ИН на каждом шаге сжимается с коэффициентом 0,618.
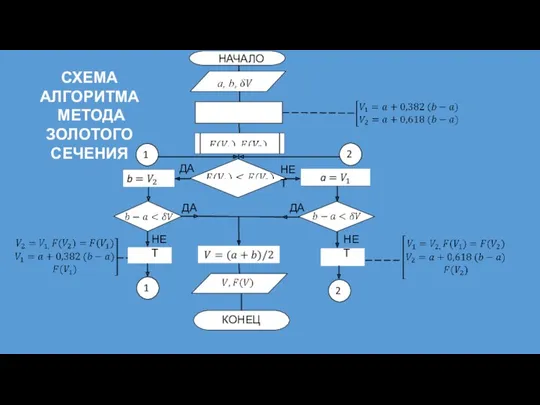
СХЕМА АЛГОРИТМА
МЕТОДА ЗОЛОТОГО СЕЧЕНИЯ
ДА
НЕТ
ДА
ДА
НЕТ
НЕТ
СХЕМА АЛГОРИТМА
МЕТОДА ЗОЛОТОГО СЕЧЕНИЯ
ДА
НЕТ
ДА
ДА
НЕТ
НЕТ
9.3. Минимизация функций многих переменных
9.3.1. Основные определения
Первый подход лежит в основе
9.3. Минимизация функций многих переменных
9.3.1. Основные определения
Первый подход лежит в основе
Методы построения таких последовательностей часто называют методами спуска, так как осуществляется
Методы построения таких последовательностей часто называют методами спуска, так как осуществляется
Если же при переходе используется какой-либо случайный механизм, то алгоритм поиска
Если же при переходе используется какой-либо случайный механизм, то алгоритм поиска
9.3.2. Численные методы безусловной оптимизации нулевого порядка
Метод покоординатного спуска
Очередность варьирования независимых
9.3.2. Численные методы безусловной оптимизации нулевого порядка
Метод покоординатного спуска
Очередность варьирования независимых
 Microsoft Office Еxcel бағдарламасы
Microsoft Office Еxcel бағдарламасы Диаграмма деятельности. Применение языка UML при разработке информационных систем
Диаграмма деятельности. Применение языка UML при разработке информационных систем G2A
G2A Учебная практика в фотосалоне ИП Нечаева Е.А
Учебная практика в фотосалоне ИП Нечаева Е.А Программирование на языке Python
Программирование на языке Python Практика React
Практика React UX Scenario Document File Version 4.3 (Please Write Your App Title)
UX Scenario Document File Version 4.3 (Please Write Your App Title) Поняття каналу зв’язку
Поняття каналу зв’язку Речь персонажа компьютерной игры как способ создания его образа
Речь персонажа компьютерной игры как способ создания его образа Методы построения калибровочных моделей для прогнозирования свойств индивидуальных углеводородов
Методы построения калибровочных моделей для прогнозирования свойств индивидуальных углеводородов Как создать анимацию в PowerPoint
Как создать анимацию в PowerPoint Деловая игра Текстовый редактор MS WORD
Деловая игра Текстовый редактор MS WORD MVP UI2FUX for DEV
MVP UI2FUX for DEV Тема: Автоматическая обработка информации. Машина Поста. 10 класс
Тема: Автоматическая обработка информации. Машина Поста. 10 класс Локальная сеть_урок в 11 классе
Локальная сеть_урок в 11 классе Язык программирования C#
Язык программирования C# An Introduction to GNSS_rev2_SD
An Introduction to GNSS_rev2_SD Правила компьютерного набора текста
Правила компьютерного набора текста The Verilog Language
The Verilog Language Кодирование графической информации
Кодирование графической информации Історія комп'ютерної техніки
Історія комп'ютерної техніки Типы, переменные, управляющие инструкции. (Тема 2.1)
Типы, переменные, управляющие инструкции. (Тема 2.1) Becherovka, SMM report
Becherovka, SMM report 3D-моделирование
3D-моделирование Решение логических задач
Решение логических задач Интегрированный урок Информатика+English: FACE to FACE
Интегрированный урок Информатика+English: FACE to FACE Интерфейс среды разработчика
Интерфейс среды разработчика Компания IT-Center
Компания IT-Center