- Планирование эксперимента при поиске оптимальных условий

Содержание
- 2. В этом случае задача сводится к оптимизационной и формулируется следующим образом: требуется определить такие координаты экстремальной
- 3. Графическая интерпретация задачи оптимизации объекта y(x1, x2) при двух факторах x1, x2 представлена на рис. a,
- 4. Необходимость в экстремальных экспериментах довольно часто возникает в инженерной практике. Так, на модели шахтной печи с
- 5. Заметим, что вид функции отклика в этом случае исследователю заранее неизвестен, т.е. отсутствует математическая модель, адекватно
- 6. Требуют значительно меньшего числа опытов и быстрее приводят к цели те поисковые методы оптимизации, где шаговое
- 7. Разработано множество методов пошаговой оптимизации, которые подробно рассматриваются в разделе вычислительной математики – “Численные методы оптимизации”.
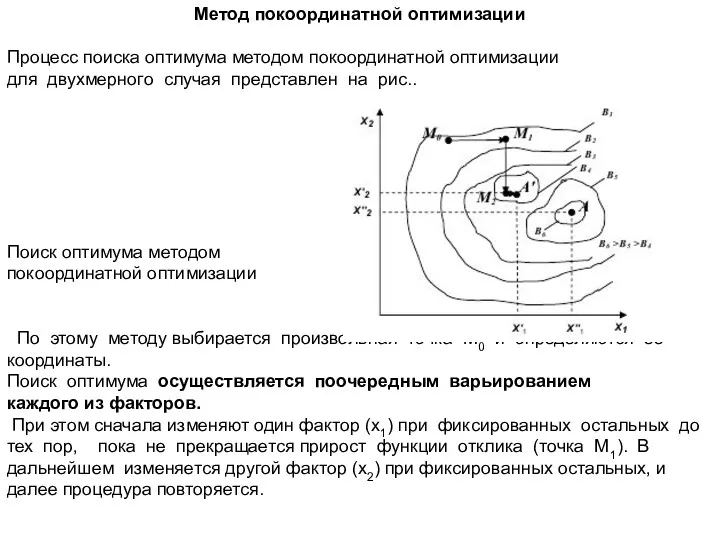
- 8. Метод покоординатной оптимизации Процесс поиска оптимума методом покоординатной оптимизации для двухмерного случая представлен на рис.. Поиск
- 9. Данный метод весьма прост, однако при большом числе факторов требуется значительное число опытов, чтобы достичь координат
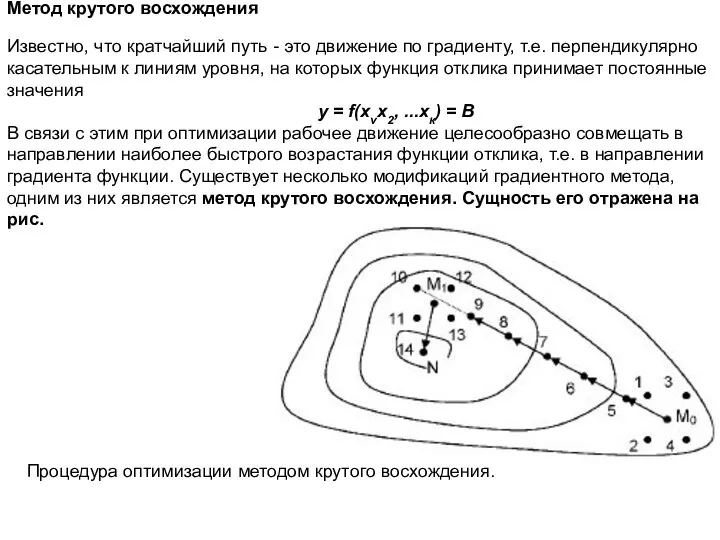
- 10. Метод крутого восхождения Известно, что кратчайший путь - это движение по градиенту, т.е. перпендикулярно касательным к
- 11. В этом случае шаговое движение осуществляется в направлении наискорейшего возрастания функции отклика, т.е. grad y(x1,x2). Однако
- 12. После чего можно найти градиент Для движения по градиенту необходимо изменять факторы пропорционально их коэффициентам регрессии
- 13. Практически алгоритм сводится к следующей последовательности операций: Планирование и постановка ПФЭ (или ДФЭ) в окрестности точки
- 14. 5. Расчет шагов изменения других факторов по формуле: hi = (blAxl)ha/a. Это соотношение между величинами шагов
- 15. 7. В окрестности локального экстремума ставят новую серию опытов (ПФЭ или ДФЭ) для определения новых значений
- 16. Признаком достижения этой области является статистическая незначимость коэффициентов bj. В этой области становятся значимыми эффекты взаимодействия
- 17. Симплекс-планирование Позволяет без предварительного изучения влияния факторов найти область оптимума. Т.к. здесь не требуется определение градиента,
- 18. Симплекс – простейший выпуклый многогранник, образованный к+1 вершинами в к-мерном пространстве, которые соединены между собой прямыми
- 19. На рис представлено геометрическое изображение симплекс-метода для двумерного случая k=2.
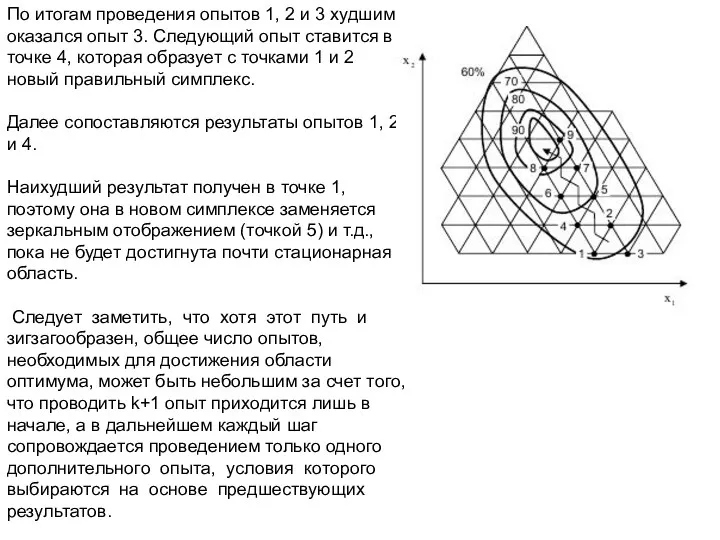
- 20. По итогам проведения опытов 1, 2 и 3 худшим оказался опыт 3. Следующий опыт ставится в
- 21. Алгоритм симплекс планирования: Строится исходный симплекс, проводятся опыты в его вершинах и анализируются результаты. 1. Выбирается
- 22. Для окончания процесса используются следующие критерии: 1 – разность значений функции отклика в вершинах симплекса становится
- 24. Скачать презентацию
В этом случае задача сводится к оптимизационной и формулируется следующим
В этом случае задача сводится к оптимизационной и формулируется следующим
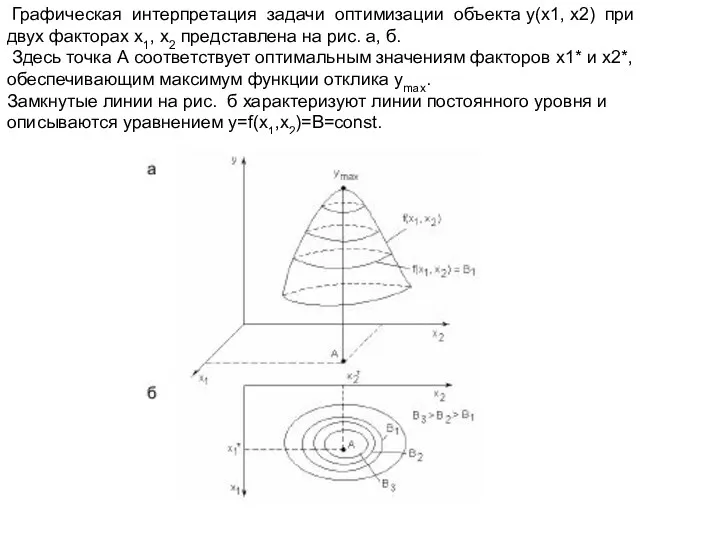
Графическая интерпретация задачи оптимизации объекта y(x1, x2) при
двух факторах
Графическая интерпретация задачи оптимизации объекта y(x1, x2) при
двух факторах
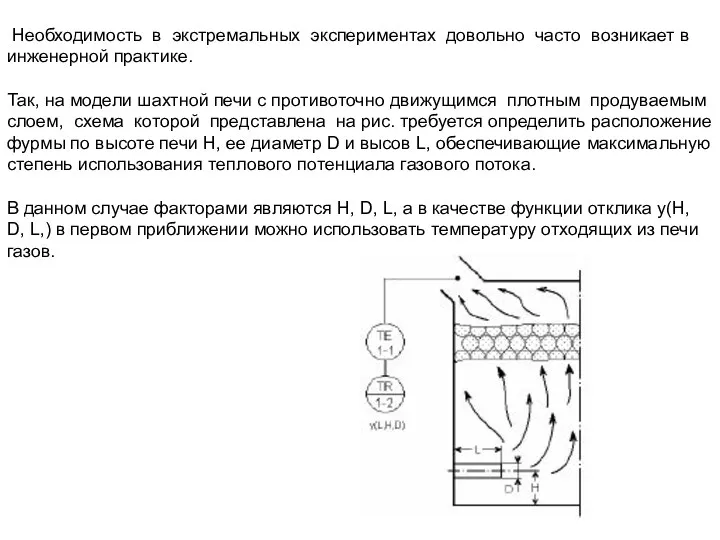
Необходимость в экстремальных экспериментах довольно часто возникает в инженерной практике.
Необходимость в экстремальных экспериментах довольно часто возникает в инженерной практике.
Заметим, что вид функции отклика в этом случае исследователю заранее неизвестен,
Заметим, что вид функции отклика в этом случае исследователю заранее неизвестен,
Требуют значительно меньшего числа опытов и быстрее приводят к цели те
Требуют значительно меньшего числа опытов и быстрее приводят к цели те
Разработано множество методов пошаговой оптимизации, которые подробно рассматриваются в разделе вычислительной
Разработано множество методов пошаговой оптимизации, которые подробно рассматриваются в разделе вычислительной
Метод покоординатной оптимизации
Процесс поиска оптимума методом покоординатной оптимизации
для двухмерного
Метод покоординатной оптимизации
Процесс поиска оптимума методом покоординатной оптимизации
для двухмерного

Данный метод весьма прост, однако при большом числе факторов
требуется значительное
Данный метод весьма прост, однако при большом числе факторов
требуется значительное
Метод крутого восхождения
Известно, что кратчайший путь - это движение по градиенту,
Метод крутого восхождения
Известно, что кратчайший путь - это движение по градиенту,
В этом случае шаговое движение осуществляется в направлении наискорейшего возрастания функции
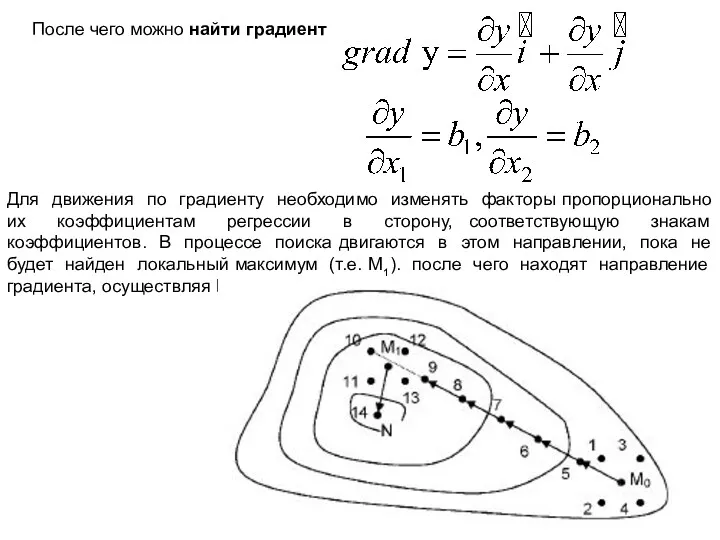
После чего можно найти градиент
Для движения по градиенту необходимо изменять факторы
После чего можно найти градиент
Для движения по градиенту необходимо изменять факторы
Практически алгоритм сводится к следующей последовательности операций:
Планирование и постановка ПФЭ (или
Практически алгоритм сводится к следующей последовательности операций:
Планирование и постановка ПФЭ (или
5. Расчет шагов изменения других факторов по формуле: hi = (blAxl)ha/a.
5. Расчет шагов изменения других факторов по формуле: hi = (blAxl)ha/a.
7. В окрестности локального экстремума ставят новую серию опытов (ПФЭ или
7. В окрестности локального экстремума ставят новую серию опытов (ПФЭ или
Признаком достижения этой области является статистическая незначимость коэффициентов bj.
В этой
Признаком достижения этой области является статистическая незначимость коэффициентов bj.
В этой
Симплекс-планирование
Позволяет без предварительного изучения влияния факторов
найти область оптимума.
Симплекс-планирование
Позволяет без предварительного изучения влияния факторов
найти область оптимума.
Симплекс – простейший выпуклый многогранник, образованный
к+1 вершинами в к-мерном пространстве,
Симплекс – простейший выпуклый многогранник, образованный
к+1 вершинами в к-мерном пространстве,
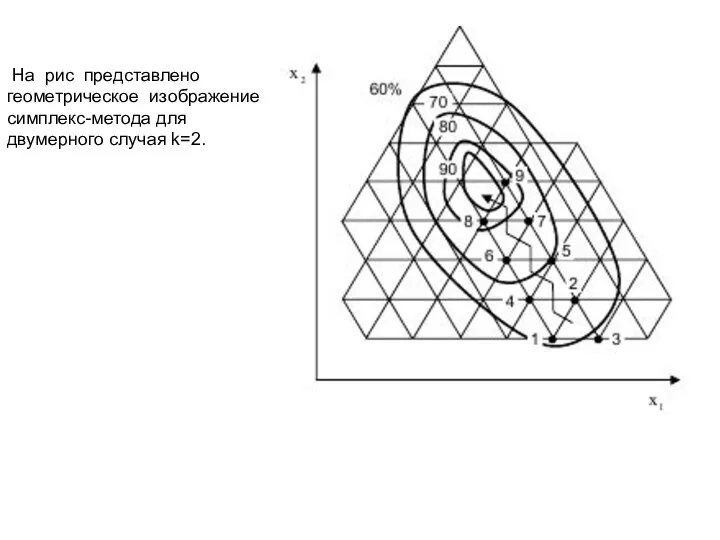
На рис представлено геометрическое изображение симплекс-метода для двумерного случая k=2.
На рис представлено геометрическое изображение симплекс-метода для двумерного случая k=2.
По итогам проведения опытов 1, 2 и 3 худшим оказался опыт
По итогам проведения опытов 1, 2 и 3 худшим оказался опыт
Алгоритм симплекс планирования:
Строится исходный симплекс, проводятся опыты в его вершинах
Алгоритм симплекс планирования:
Строится исходный симплекс, проводятся опыты в его вершинах
Для окончания процесса используются следующие критерии:
1 – разность значений функции
Для окончания процесса используются следующие критерии:
1 – разность значений функции
 Решение задач с помощью квадратных уравнений . 9 класс
Решение задач с помощью квадратных уравнений . 9 класс Конкурс красоты, ума и таланта. Мисс Математика
Конкурс красоты, ума и таланта. Мисс Математика Урок Величины (юбилею школы посвящается)
Урок Величины (юбилею школы посвящается) Проценты в реальной жизни
Проценты в реальной жизни Определенный интеграл. Формула Ньютона-Лейбница
Определенный интеграл. Формула Ньютона-Лейбница Касательная к окружности
Касательная к окружности Многоугольники. 5 класс
Многоугольники. 5 класс Сфера. Уравнение сферы
Сфера. Уравнение сферы Геометрияның негізгі ұғымдары
Геометрияның негізгі ұғымдары Матричная алгебра в экономике
Матричная алгебра в экономике Второй признак равенства треугольников
Второй признак равенства треугольников Функция. Свойства функции
Функция. Свойства функции 02.2022 матем
02.2022 матем Аксонометрические проекции. Черчение
Аксонометрические проекции. Черчение Статистические гипотезы. Параметрические критерии. (Лекция 5)
Статистические гипотезы. Параметрические критерии. (Лекция 5) Введение в эконометрику
Введение в эконометрику Числа от 1 до 20
Числа от 1 до 20 Уравнение. 5 класс
Уравнение. 5 класс Алгебра. Исторический очерк
Алгебра. Исторический очерк Инновационный подход к актуализации экологического компонента в математике
Инновационный подход к актуализации экологического компонента в математике Приёмы устных вычислений в пределах 1000. Закрепление
Приёмы устных вычислений в пределах 1000. Закрепление Время
Время Текстовые задачи. Задачи на движение по окружности
Текстовые задачи. Задачи на движение по окружности Евклидова геометрия
Евклидова геометрия Симметрия в природе
Симметрия в природе Понятие о доказательной медицине. Случайное событие. Определение вероятности. Лекция 2
Понятие о доказательной медицине. Случайное событие. Определение вероятности. Лекция 2 Величины. Длина. (1 класс)
Величины. Длина. (1 класс) презентация к уроку №83
презентация к уроку №83