- Решение обыкновенных дифференциальных уравнений. Лекция 5

Содержание
- 3. ОБЫКНОВЕННЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ Начальная задача (задача Коши) Краевая задача
- 4. Задача Коши — одна из основных задач теории дифференциальных уравнений; состоит в нахождении решения (интеграла) дифференциального
- 5. Модельная задача. (1)
- 6. Дискретное пространство – это совокупность узлов сетки, характеризуемых шагом (const или нет) и означаемым h-параметром Модель:
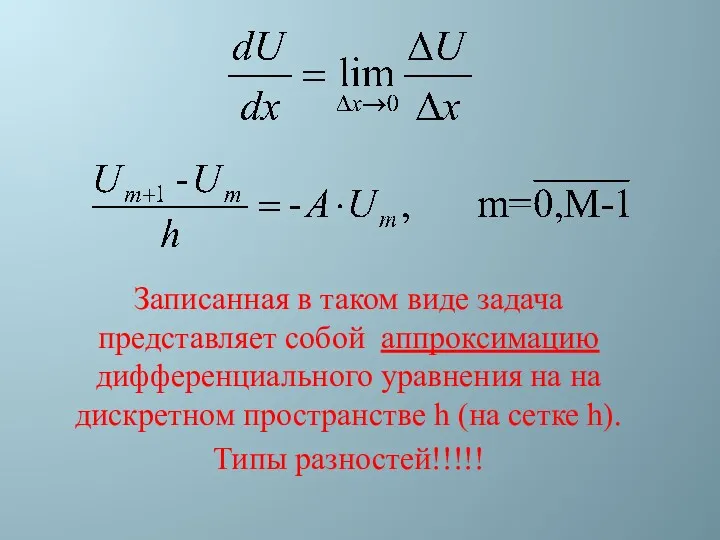
- 7. Записанная в таком виде задача представляет собой аппроксимацию дифференциального уравнения на дискретном пространстве h (на сетке
- 8. Если в правой части стоит функция общего вида f(x,y(x)), то наша схема запишется таким образом: Это
- 9. Конфигурацию узлов, используемую для разностной записи уравнений на сетке, называют шаблоном. Шаблон, используемый на предыдущем слайде
- 10. Поскольку начальное значение функции U известно, это U0, то решение в любой точке нашего дискретного пространства
- 11. Если значение функции в точке, полученное в результате решения разностного уравнения стремиться, при уменьшении шага, к
- 12. Погрешность использованной разностной схемы будет порядка h. Или иначе: данная разностная схема имеет первый порядок точности.
- 14. Записанная в таком виде задача представляет собой аппроксимацию дифференциального уравнения на на дискретном пространстве h (на
- 15. Центральные разности
- 16. Формальные определения. Введем следующие обозначения: LU=f – дифференциальная задача (1) U(x) - искомое решение ( пусть
- 17. Сходимость: решение разностной задачи (2) U(h) сходится к решению задачи (1) если в пространстве сеточных функций.
- 18. Аппроксимация: разностная задача (2) аппроксимирует (1) на решение U(x), если где Fh - пространство сеточных функций
- 19. Другая формулировка: - разностная задача устойчива, если Устойчивость:
- 20. Теорема Лакса: из аппроксимации и устойчивости следует сходимость.
- 21. Метод Рунге-Кутты Семейство схем Рунге-Кутты основано на различной аппроксимации неизвестных аргументов y (tn) в правых частях
- 22. Схемы Рунге-Кутты IV порядка точности
- 23. Метод Адамса-Бэшфорта Метод основан на аппроксимации интерполяционными полиномами правых частей ОДУ. В зависимости от типа экстраполяции
- 24. Схема Адамса-Бэшфорда При решении ОДУ на n-м шаге численного решения имеем точную формулу интегрирования: Для построения
- 25. Схема Адамса-Бэшфорда Схема 2-шагового алгоритма получается при использовании линейной экстраполяции по 2-м предыдущим точкам Схема 4-шагового
- 26. Метод Булишера-Штера. Основная идея: Метод строит рациональную интерполирующую функцию, которая в точке h/2 проходит через состояние
- 27. Что такое жесткие системы ОДУ? В данном курсе ограничимся следующим понятием жесткости системы: система будет жесткой,
- 28. Алгоритмы решения для жестких систем ОДУ Алгоритм Розенброка - является одношаговым и явным. Однако при пересчет
- 29. Алгоритмы решения для жестких систем ОДУ В Mathcad реализованы так же: алгоритм RADAU5 – алгоритм решения
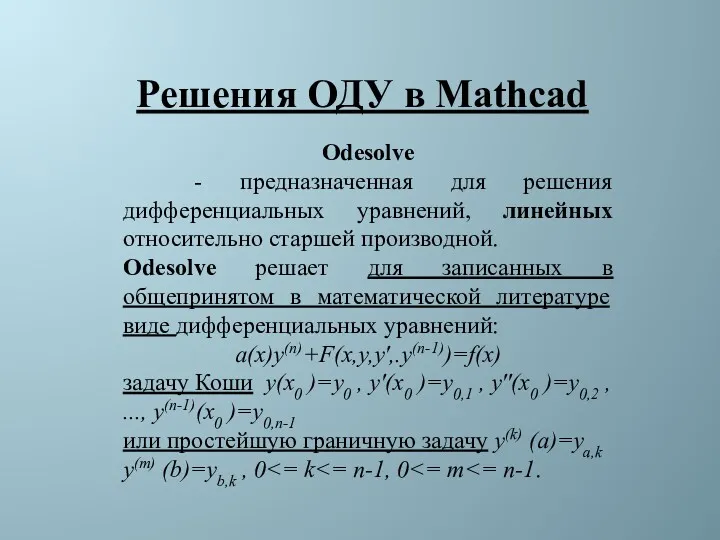
- 30. Решения ОДУ в Mathcad Оdesolve - предназначенная для решения дифференциальных уравнений, линейных относительно старшей производной. Оdesolve
- 31. Функция Оdesolve по умолчанию решает поставленную задачу гибридным решателем: метод Адамса/метод обратного дифференцирования Для решения задачи
- 32. Обращение к функции для решения одного уравнения имеет вид : Given Формулировка уравнений и начальных/граничных условий
- 33. При вводе уравнения и условий задачи используется знак символьного равенства ( + ). Для записи производных
- 34. Начальная точка промежутка интегрирования Конечная точка промежутка интегрирования Значение функции в начальной точке промежутка интегрирования Правая
- 35. Вывод решения ОДУ на график при использовании блока Given-Odesolve
- 36. В Mathcad решить задачу Коши для не жесткой системы ОДУ можно так же с помощью следующих
- 37. В Mathcad решить задачу Коши для жестких ОДУ можно с помощью функций: BDF(y, x1, x2, npoints,
- 38. В Mathcad c 14 версии существует гибридный метод: AdamsBDF(y, x1, x2, npoints, D, {J},{acc}) В функции
- 39. y — вектор начальных условий ; x1, x2 — начальная и конечная точки отрезка интегрирования системы;
- 40. J — имя матрицы-функции J(x,y) размерности n x (n+1), в первом столбце которой хранятся выражения частных
- 41. Результат работы функций : матрица, содержащая n+1 строк; ее первый столбец содержит координаты узлов сетки, второй
- 42. При использовании функций библиотеки DES (Differential Equation Solving) дифференциальные уравнения, входящие в систему, должны иметь первый
- 43. Для преобразования уравнений в нормальную форму есть два основных подхода: Понижение порядка уравнений путем замены переменных.
- 44. 1 2 3
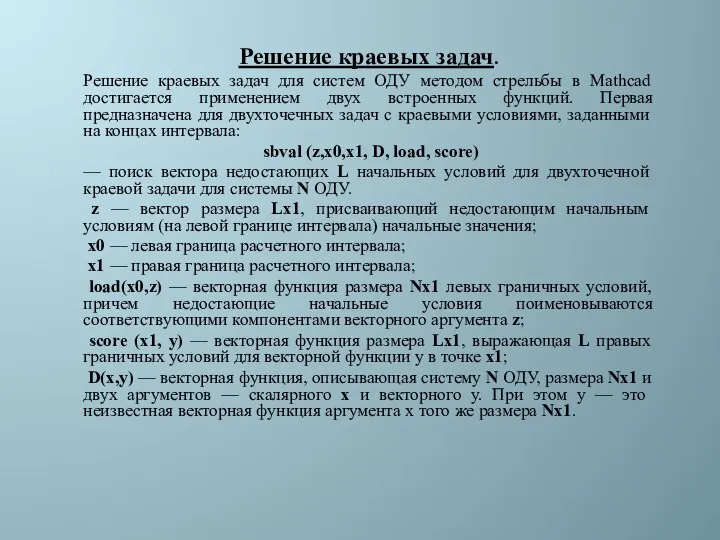
- 46. Решение краевых задач. Решение краевых задач для систем ОДУ методом стрельбы в Mathcad достигается применением двух
- 47. Решение краевых задач в Mathcad реализовано не совсем очевидным образом. Необходимо помнить, что число элементов векторов
- 48. Краевая задача
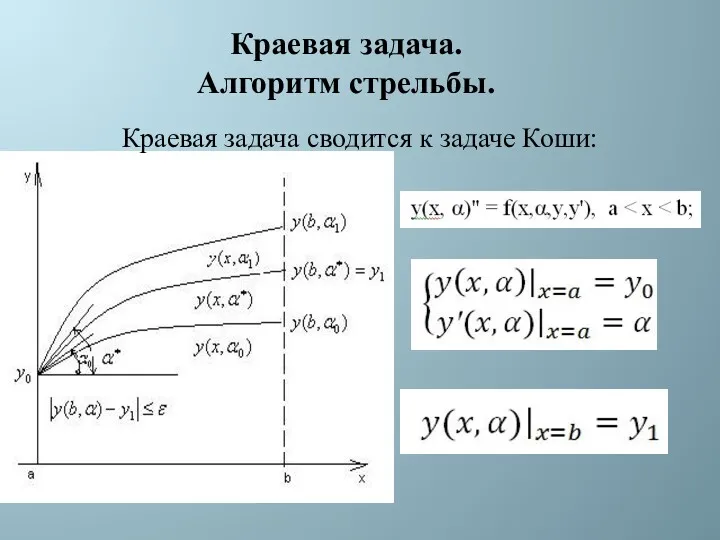
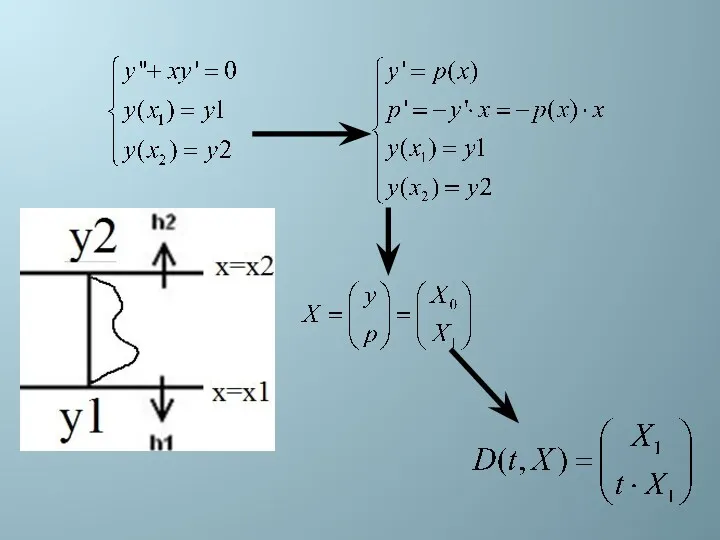
- 49. Краевая задача. Алгоритм стрельбы. Краевая задача сводится к задаче Коши:
- 55. Скачать презентацию
ОБЫКНОВЕННЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
Начальная задача (задача Коши)
Краевая задача
ОБЫКНОВЕННЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
Начальная задача (задача Коши)
Краевая задача
Задача Коши — одна из основных задач теории дифференциальных уравнений; состоит
Задача Коши — одна из основных задач теории дифференциальных уравнений; состоит
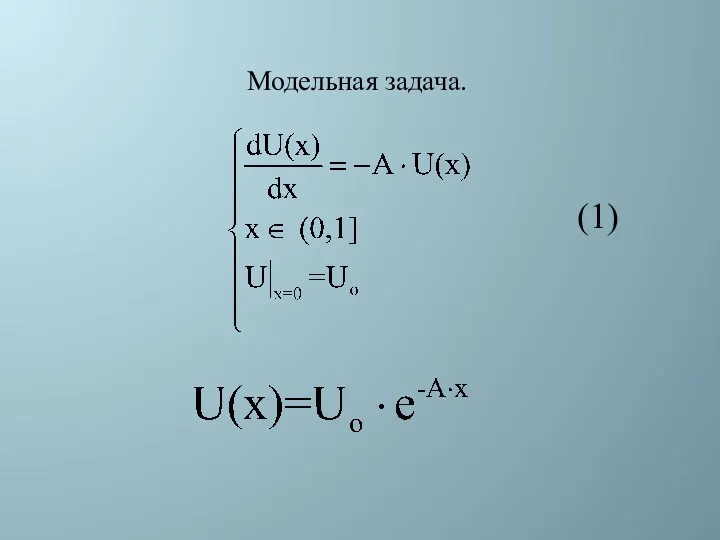
Модельная задача.
(1)
Модельная задача.
(1)
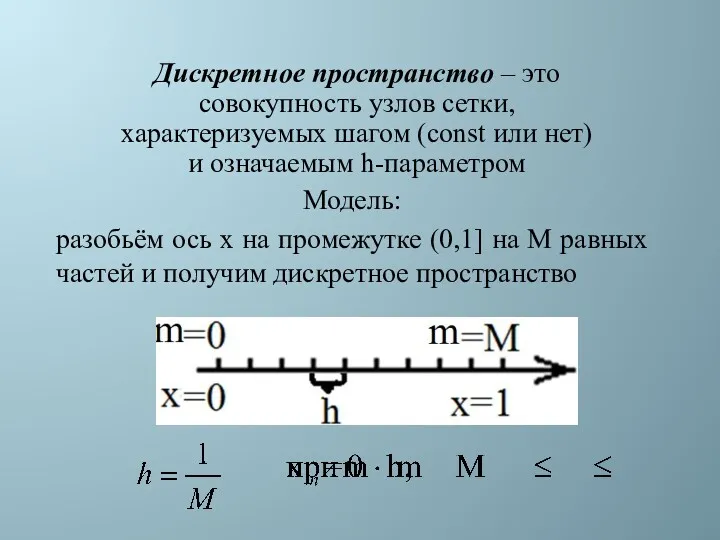
Дискретное пространство – это совокупность узлов сетки, характеризуемых шагом (const или
Дискретное пространство – это совокупность узлов сетки, характеризуемых шагом (const или
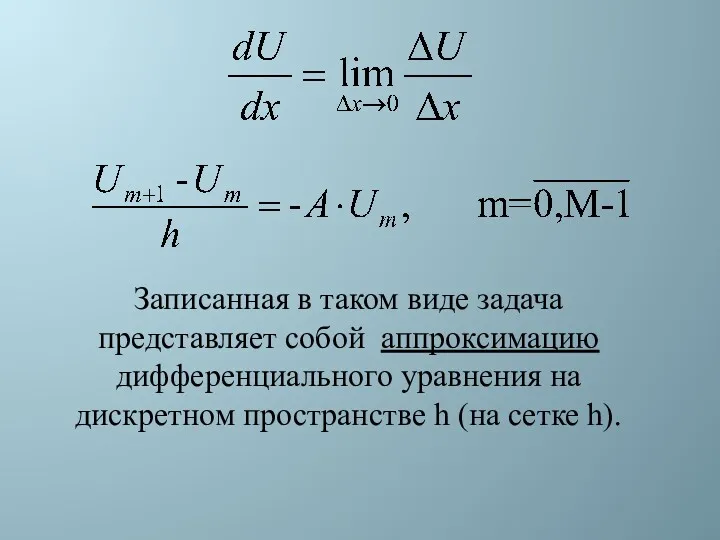
Записанная в таком виде задача представляет собой аппроксимацию дифференциального уравнения на
Записанная в таком виде задача представляет собой аппроксимацию дифференциального уравнения на
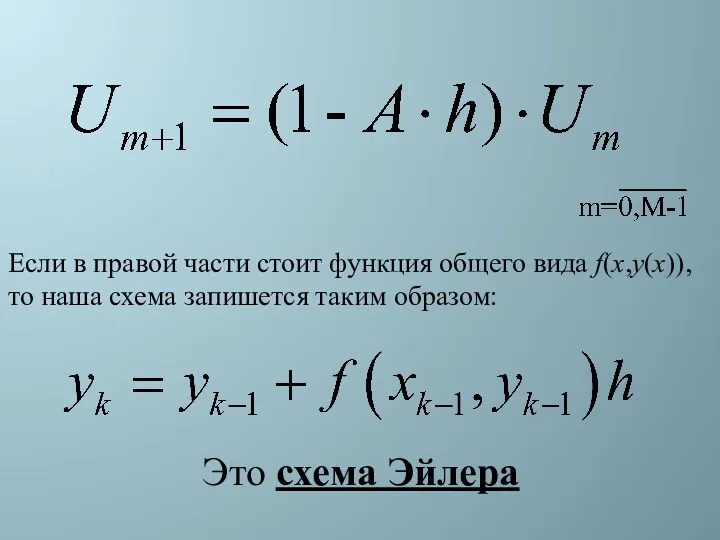
Если в правой части стоит функция общего вида f(x,y(x)), то наша
Если в правой части стоит функция общего вида f(x,y(x)), то наша
Конфигурацию узлов, используемую для разностной записи уравнений на сетке, называют шаблоном.
Шаблон,
Конфигурацию узлов, используемую для разностной записи уравнений на сетке, называют шаблоном.
Шаблон,
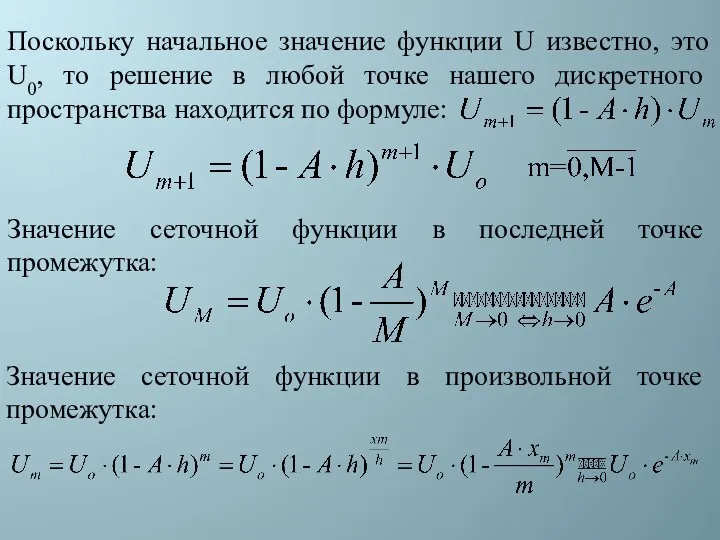
Поскольку начальное значение функции U известно, это U0, то решение в
Поскольку начальное значение функции U известно, это U0, то решение в
Если значение функции в точке, полученное в результате решения разностного уравнения
Если значение функции в точке, полученное в результате решения разностного уравнения
Погрешность использованной разностной схемы будет порядка h.
Или иначе: данная разностная
Погрешность использованной разностной схемы будет порядка h.
Или иначе: данная разностная
Записанная в таком виде задача представляет собой аппроксимацию дифференциального уравнения на
Записанная в таком виде задача представляет собой аппроксимацию дифференциального уравнения на
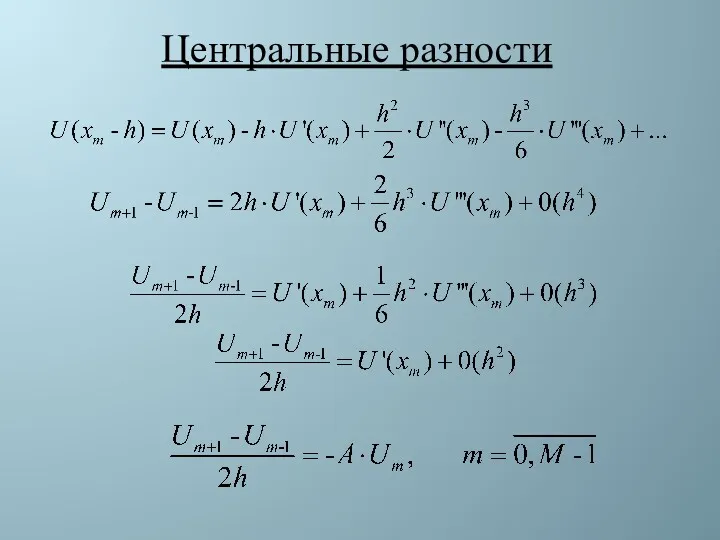
Центральные разности
Центральные разности
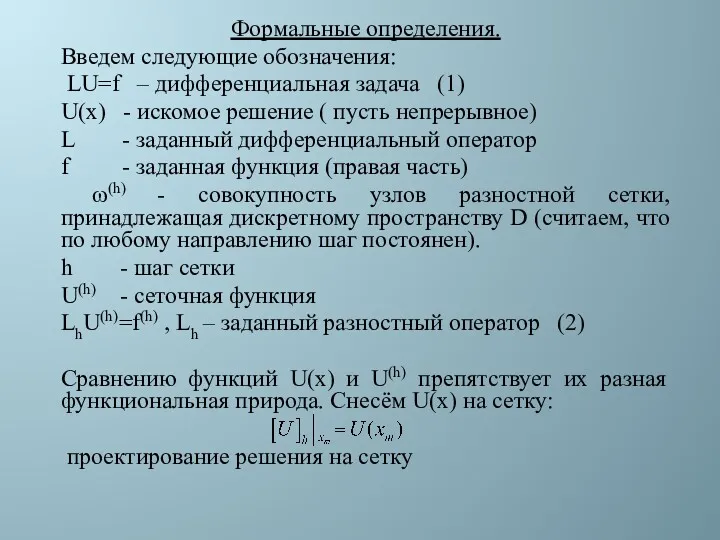
Формальные определения.
Введем следующие обозначения:
LU=f – дифференциальная задача (1)
U(x) - искомое
Формальные определения.
Введем следующие обозначения:
LU=f – дифференциальная задача (1)
U(x) - искомое
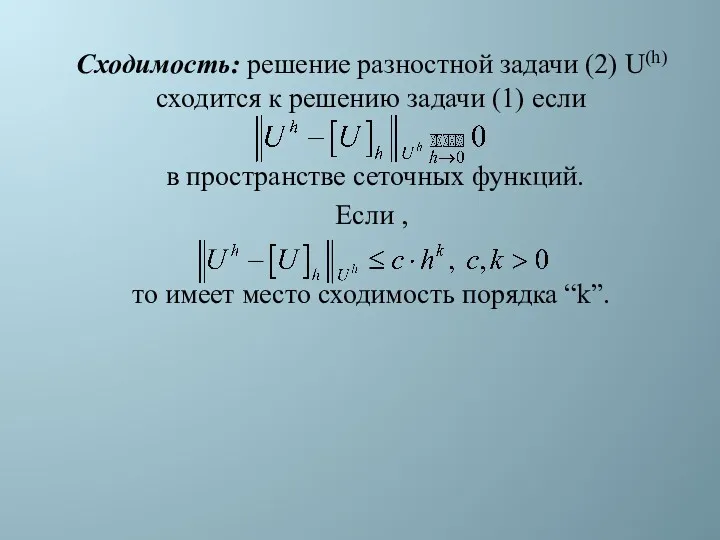
Сходимость: решение разностной задачи (2) U(h) сходится к решению задачи (1)
Сходимость: решение разностной задачи (2) U(h) сходится к решению задачи (1)
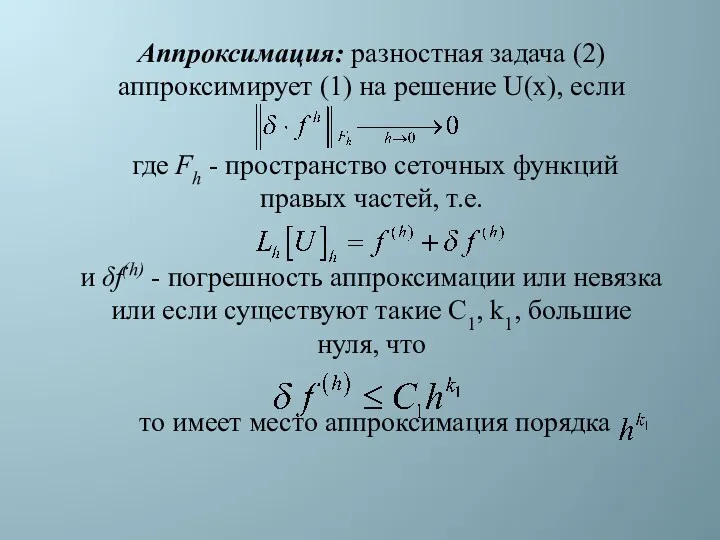
Аппроксимация: разностная задача (2) аппроксимирует (1) на решение U(x), если
Аппроксимация: разностная задача (2) аппроксимирует (1) на решение U(x), если
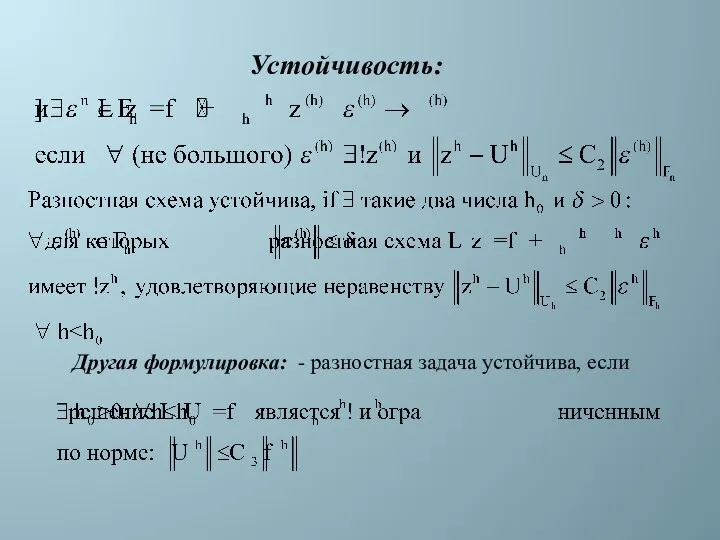
Другая формулировка: - разностная задача устойчива, если
Устойчивость:
Другая формулировка: - разностная задача устойчива, если
Устойчивость:
Теорема Лакса: из аппроксимации и устойчивости следует сходимость.
Теорема Лакса: из аппроксимации и устойчивости следует сходимость.
Метод Рунге-Кутты
Семейство схем Рунге-Кутты основано на различной аппроксимации неизвестных аргументов y
Метод Рунге-Кутты
Семейство схем Рунге-Кутты основано на различной аппроксимации неизвестных аргументов y
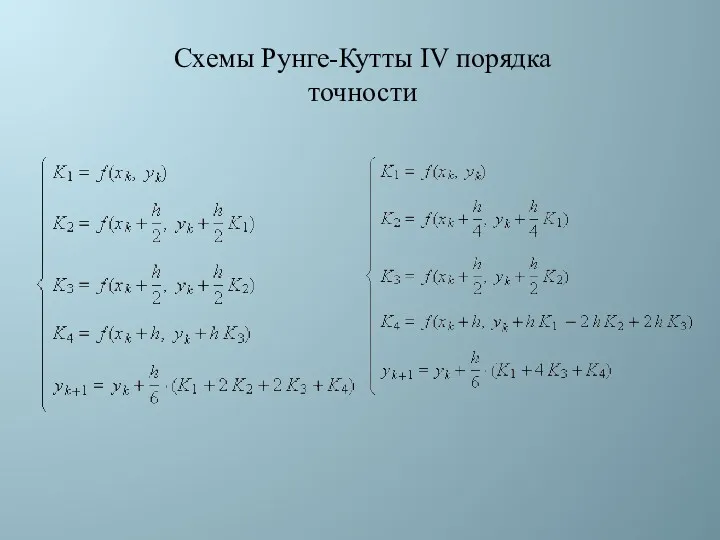
Схемы Рунге-Кутты IV порядка точности
Схемы Рунге-Кутты IV порядка точности
Метод Адамса-Бэшфорта
Метод основан на аппроксимации интерполяционными полиномами правых частей ОДУ. В
Метод Адамса-Бэшфорта
Метод основан на аппроксимации интерполяционными полиномами правых частей ОДУ. В
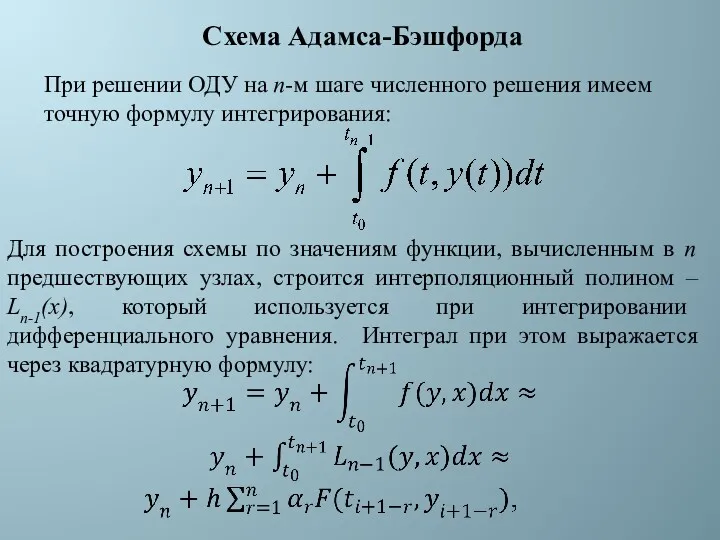
Схема Адамса-Бэшфорда
При решении ОДУ на n-м шаге численного решения имеем точную
Схема Адамса-Бэшфорда
При решении ОДУ на n-м шаге численного решения имеем точную
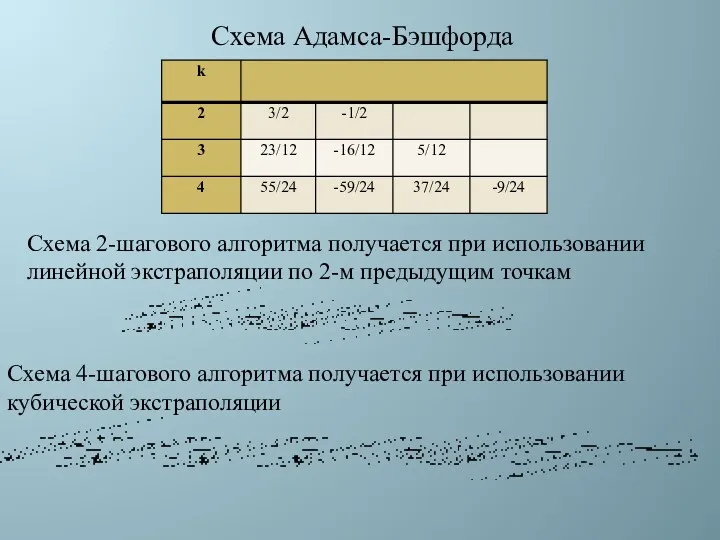
Схема Адамса-Бэшфорда
Схема 2-шагового алгоритма получается при использовании линейной экстраполяции по 2-м
Схема Адамса-Бэшфорда
Схема 2-шагового алгоритма получается при использовании линейной экстраполяции по 2-м
Метод Булишера-Штера.
Основная идея: Метод строит рациональную интерполирующую функцию, которая в
Метод Булишера-Штера.
Основная идея: Метод строит рациональную интерполирующую функцию, которая в
Что такое жесткие системы ОДУ?
В данном курсе ограничимся следующим понятием
Что такое жесткие системы ОДУ?
В данном курсе ограничимся следующим понятием
Алгоритмы решения для жестких систем ОДУ
Алгоритм Розенброка - является одношаговым и
Алгоритмы решения для жестких систем ОДУ
Алгоритм Розенброка - является одношаговым и
Алгоритмы решения для жестких систем ОДУ
В Mathcad реализованы так же:
алгоритм
Алгоритмы решения для жестких систем ОДУ
В Mathcad реализованы так же:
алгоритм
Решения ОДУ в Mathcad
Оdesolve
- предназначенная для решения дифференциальных уравнений,
Решения ОДУ в Mathcad
Оdesolve
- предназначенная для решения дифференциальных уравнений,
Функция Оdesolve по умолчанию решает поставленную задачу гибридным решателем: метод Адамса/метод
Функция Оdesolve по умолчанию решает поставленную задачу гибридным решателем: метод Адамса/метод
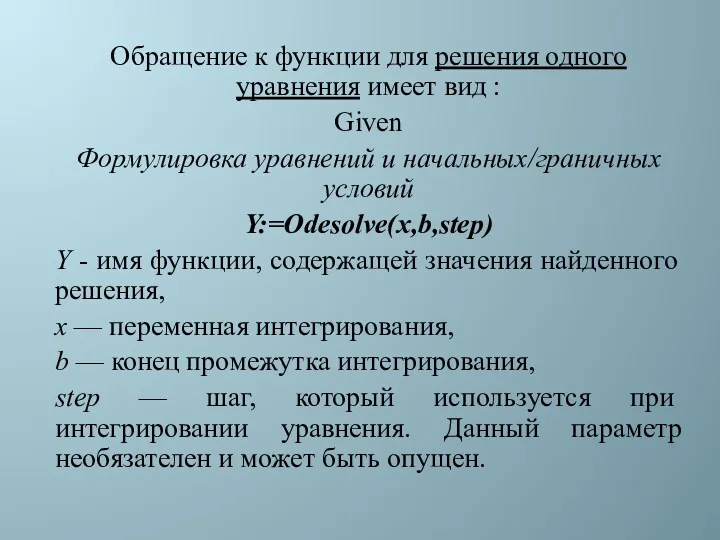
Обращение к функции для решения одного уравнения имеет вид :
Given
Формулировка уравнений
Обращение к функции для решения одного уравнения имеет вид :
Given
Формулировка уравнений
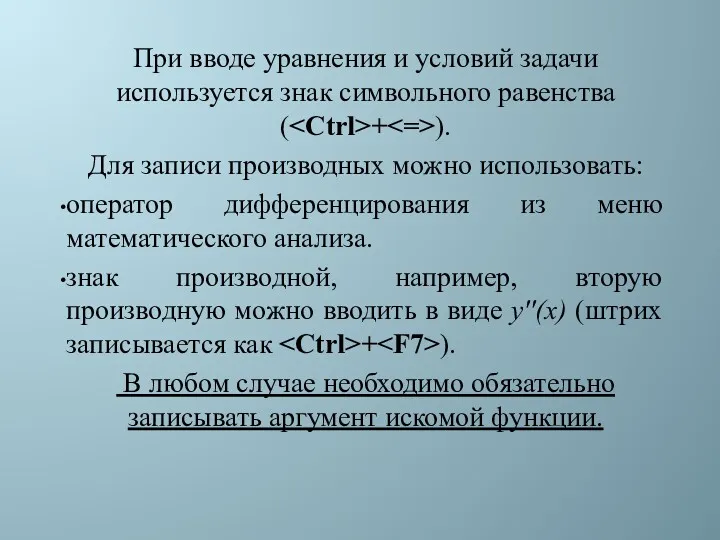
При вводе уравнения и условий задачи используется знак символьного равенства (+<=>).
Для
При вводе уравнения и условий задачи используется знак символьного равенства (
Для
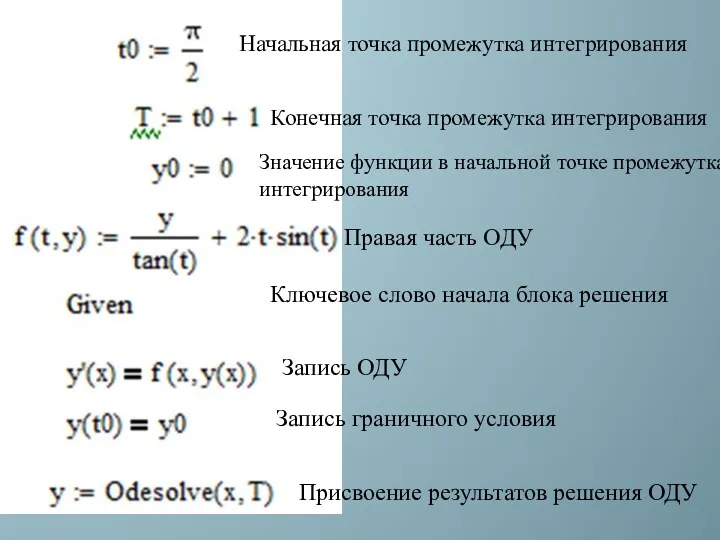
Начальная точка промежутка интегрирования
Конечная точка промежутка интегрирования
Значение функции в начальной точке
Начальная точка промежутка интегрирования
Конечная точка промежутка интегрирования
Значение функции в начальной точке
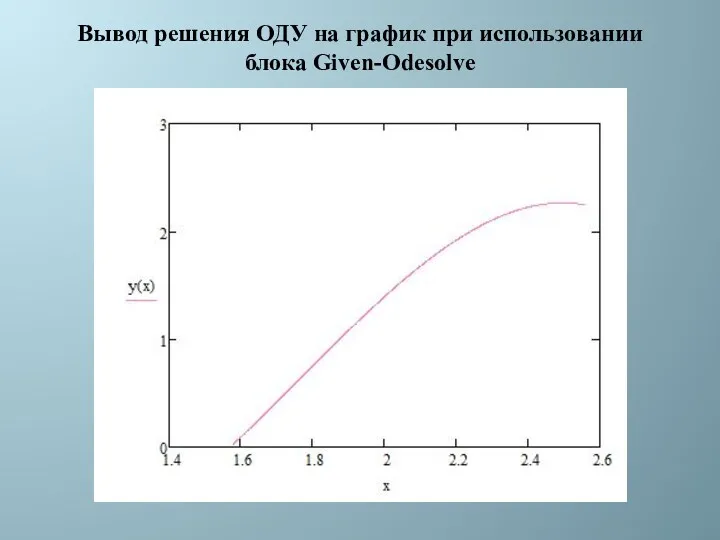
Вывод решения ОДУ на график при использовании
блока Given-Odesolve
Вывод решения ОДУ на график при использовании
блока Given-Odesolve
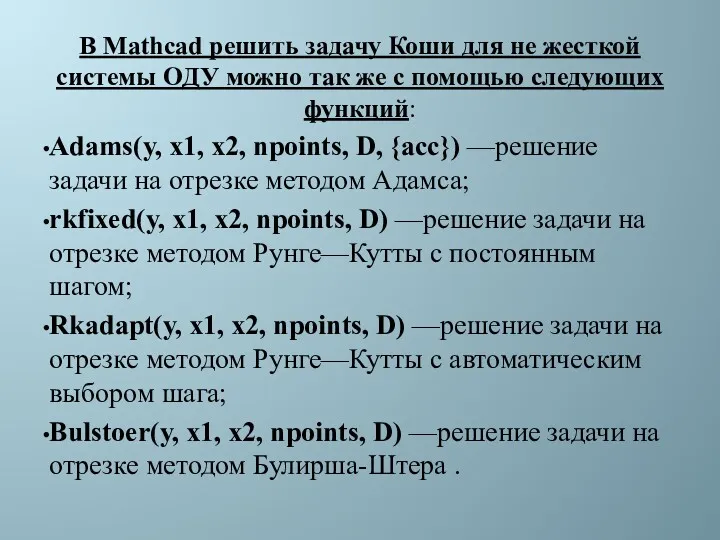
В Mathcad решить задачу Коши для не жесткой системы ОДУ можно
В Mathcad решить задачу Коши для не жесткой системы ОДУ можно
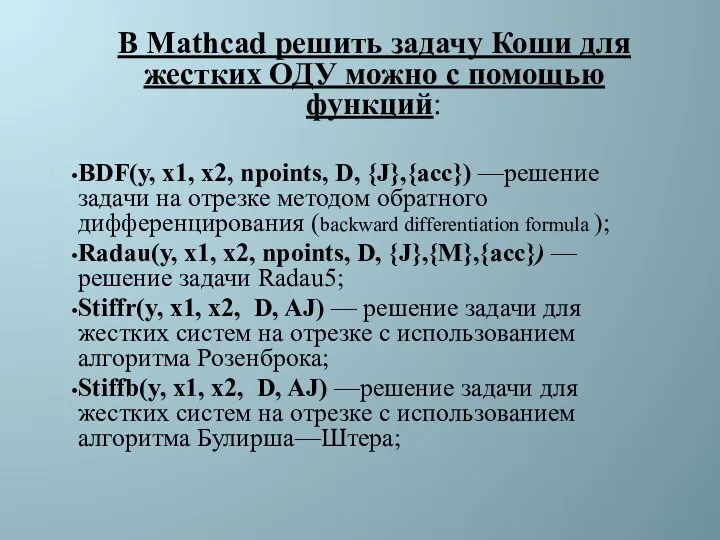
В Mathcad решить задачу Коши для жестких ОДУ можно с помощью
В Mathcad решить задачу Коши для жестких ОДУ можно с помощью
В Mathcad c 14 версии существует гибридный метод:
AdamsBDF(y, x1, x2,
В Mathcad c 14 версии существует гибридный метод:
AdamsBDF(y, x1, x2,
y — вектор начальных условий ;
x1, x2 — начальная и конечная
y — вектор начальных условий ;
x1, x2 — начальная и конечная
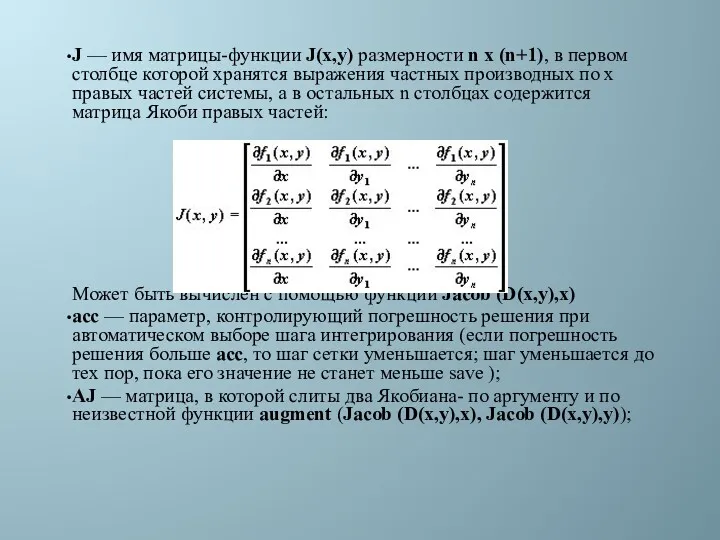
J — имя матрицы-функции J(x,y) размерности n x (n+1), в первом
J — имя матрицы-функции J(x,y) размерности n x (n+1), в первом
Результат работы функций :
матрица, содержащая n+1 строк;
ее первый столбец
Результат работы функций :
матрица, содержащая n+1 строк;
ее первый столбец
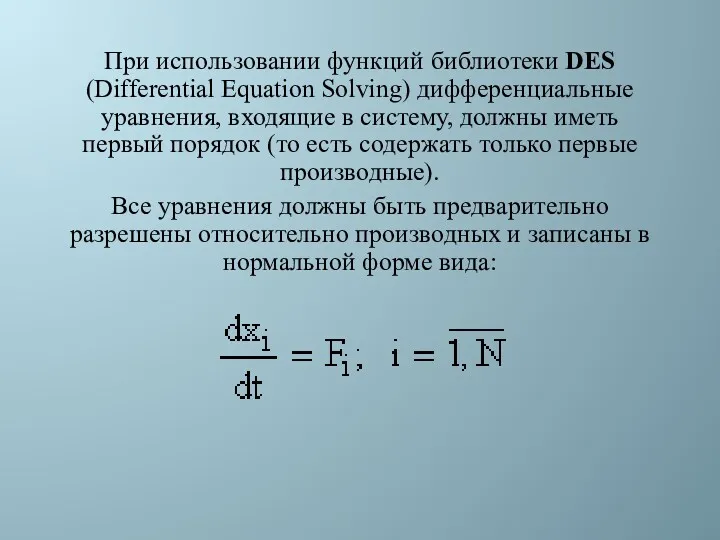
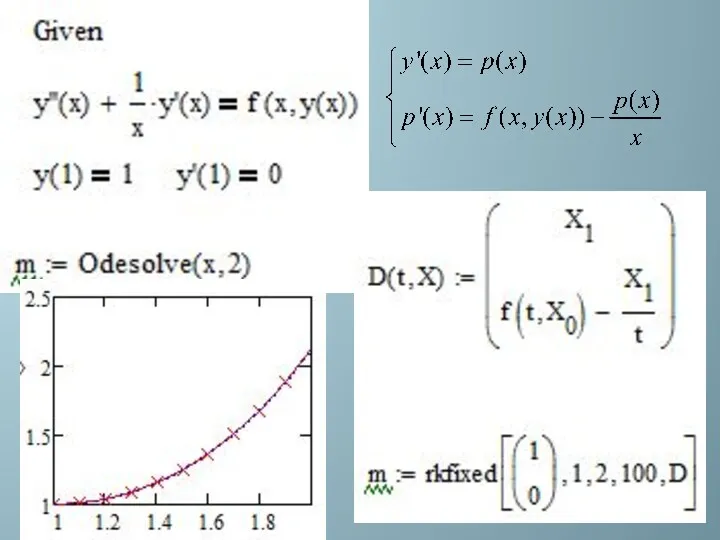
При использовании функций библиотеки DES (Differential Equation Solving) дифференциальные уравнения, входящие
При использовании функций библиотеки DES (Differential Equation Solving) дифференциальные уравнения, входящие
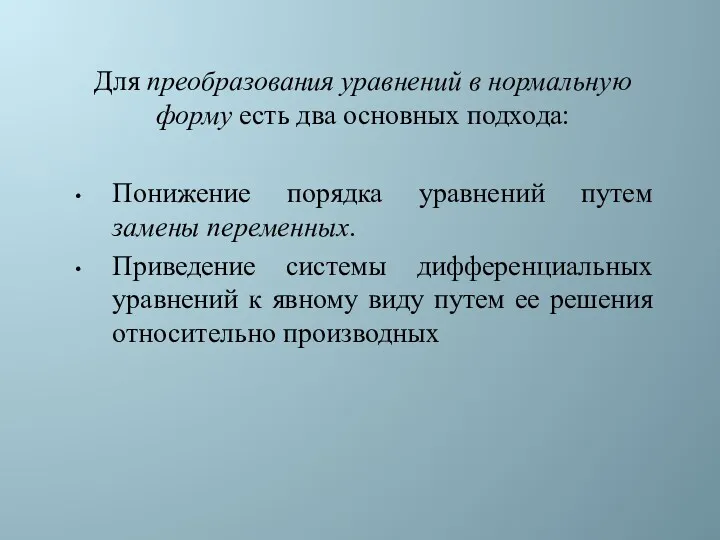
Для преобразования уравнений в нормальную форму есть два основных подхода:
Понижение порядка
Для преобразования уравнений в нормальную форму есть два основных подхода:
Понижение порядка
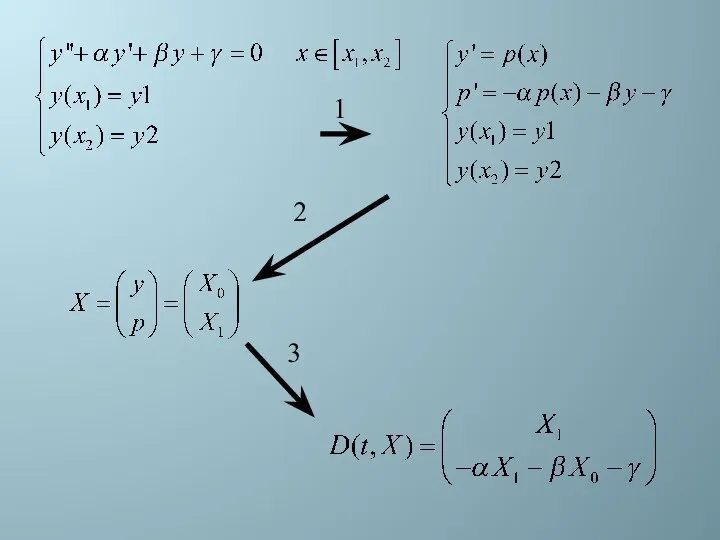
1
2
3
1
2
3
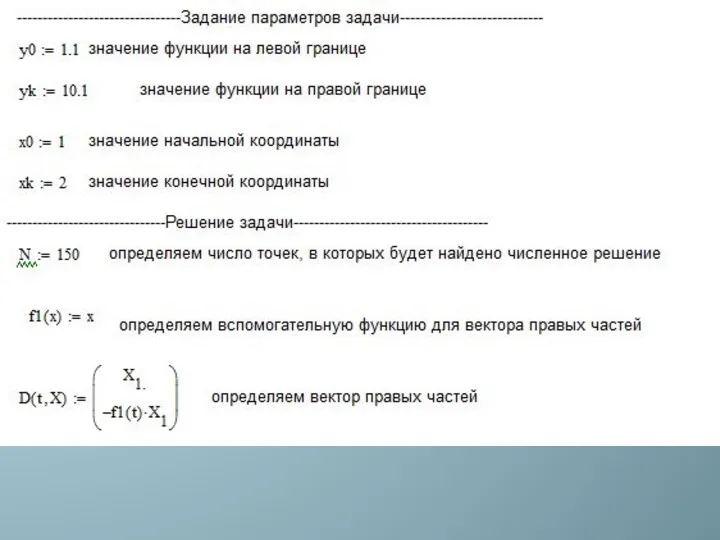
Решение краевых задач.
Решение краевых задач для систем ОДУ методом стрельбы в
Решение краевых задач.
Решение краевых задач для систем ОДУ методом стрельбы в
Решение краевых задач в Mathcad реализовано не совсем очевидным образом.
Необходимо
Решение краевых задач в Mathcad реализовано не совсем очевидным образом.
Необходимо

Краевая задача
Краевая задача
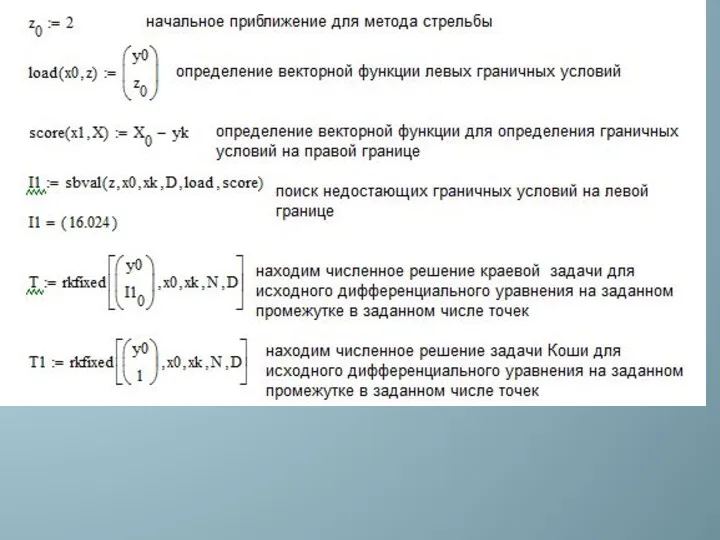
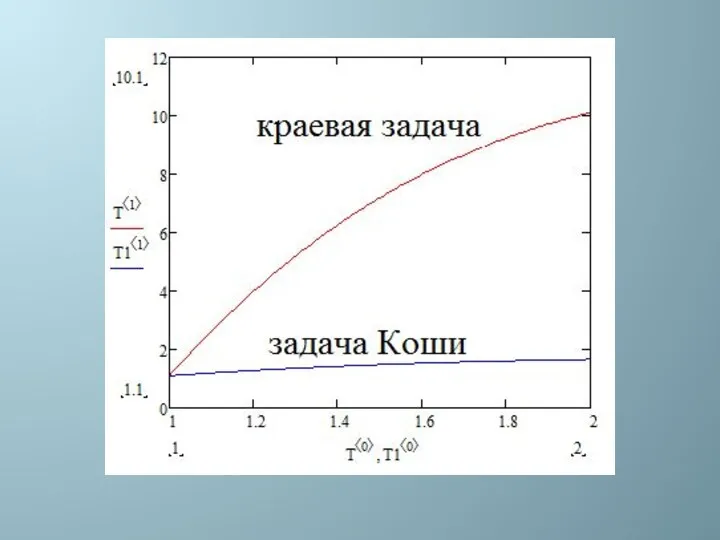
Краевая задача. Алгоритм стрельбы.
Краевая задача сводится к задаче Коши:
Краевая задача. Алгоритм стрельбы.
Краевая задача сводится к задаче Коши:
 Старинные меры длины
Старинные меры длины Решение логических содержательных задач с использованием графов
Решение логических содержательных задач с использованием графов Возможные косвенные показатели для улучшения мультиколлинеарности
Возможные косвенные показатели для улучшения мультиколлинеарности Возведение в степень произведения и степени. 7 класс
Возведение в степень произведения и степени. 7 класс Тест по математике в форме ЕГЭ
Тест по математике в форме ЕГЭ Расположите в порядке возрастания числа
Расположите в порядке возрастания числа Задачи по теме Развитие пространственного мышления по геометрии для 7 класса
Задачи по теме Развитие пространственного мышления по геометрии для 7 класса Цифры.Анимированный плакат.
Цифры.Анимированный плакат. Математические моделирования в электронных таблицах
Математические моделирования в электронных таблицах Квадратные уравнения. Обобщающий урок. 8 класс
Квадратные уравнения. Обобщающий урок. 8 класс Презентация по математике
Презентация по математике Теория множеств. (Лекция 5)
Теория множеств. (Лекция 5) Случайные события
Случайные события Кривые второго порядка
Кривые второго порядка Розв'язуємо задачі на різницеве порівняння двох добутків. Урок №81
Розв'язуємо задачі на різницеве порівняння двох добутків. Урок №81 Открытое мероприятие совместной деятельности по развитию математических способностей детей старшего дошкольного возраста
Открытое мероприятие совместной деятельности по развитию математических способностей детей старшего дошкольного возраста Свойства числовых неравенств
Свойства числовых неравенств Применение тригонометрических формул для решения уравнений
Применение тригонометрических формул для решения уравнений Узоры и орнаменты
Узоры и орнаменты Линейное уравнение с двумя переменными и его график
Линейное уравнение с двумя переменными и его график Презентация по математике по теме Решение задач 1 класс
Презентация по математике по теме Решение задач 1 класс Наибольшее и наименьшее значения. Размах
Наибольшее и наименьшее значения. Размах Тренажёр умножения на 2
Тренажёр умножения на 2 Упрощение выражений. 5 класс
Упрощение выражений. 5 класс Параллельный перенос. Поворот и симметрия. Самостоятельная работа. 9 класс
Параллельный перенос. Поворот и симметрия. Самостоятельная работа. 9 класс презентация к уроку математики 4 класс на тему Объем прямоугольного параллелепипеда
презентация к уроку математики 4 класс на тему Объем прямоугольного параллелепипеда Треугольник. 7 класс
Треугольник. 7 класс Интегрированный урок Думаем, решаем, анализируем в волшебной стране (математика, литературное чтение)
Интегрированный урок Думаем, решаем, анализируем в волшебной стране (математика, литературное чтение)