- Наука об управлении движением. Motor Control

Содержание
- 2. НАУКА О ДВИЖЕНИИ ИСТОРИЧЕСКИЕ ВЕХИ
- 3. Рефлекс стимул - реакция http://www.philosophy.leeds.ac.uk/GMR/hmp/texts/modern/descartes/body/body.html DESCARTES. THE DESCRIPTION OF THE HUMAN BODY Translation © George MacDonald
- 4. Hermann von Helmholtz впервые измерил скорость проведения сигнала по нерву. До этого считалось, что сигналы по
- 5. http://en.wikipedia.org/wiki/Sir_Charles_Scott_Sherrington Sir Charles Scott Sherrington Развил представления об интегративной деятельности ЦНС и роли рефлексов в этой
- 6. http://wiki.myword.ru/index.php/Вудвортс_Роберт_СессионсВудвортс Р. Экспериментальная психология : сокр. пер. с англ. / Ред. Г. К. Гуртового и М.
- 7. Karl Lashley серийная организация движений Развил представления о способах внутреннего представления (внутренней репрезентации) последовательности действий (серии
- 8. Иван Михайлович Сеченов (1829 - 1905) Основатель электрофизиологии. Показал, что существует связь между процессами в мозге
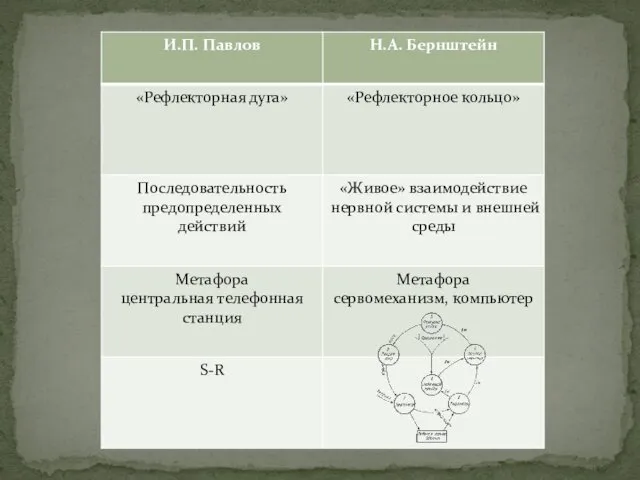
- 9. http://en.wikipedia.org/wiki/Classical_conditioning Иван Петрович Павлов (1849 - 1936) Условный рефлекс
- 10. Научная концепция условного рефлекса впервые была экспериментально обоснована И.П. Павловым Доклад И.П. Павлова на XIV Международном
- 11. Павловская метафора телефонной станции
- 12. Николай Александрович Бернштейн (1896 - 1966) Основатель биомеханики и автор термина "биомеханика" Впервые поставил проблему управляемости
- 13. Уровни управления движениями по Н.А.Бернштейну
- 14. Характеристика уровней построения движений по Н.А. Бернштейну
- 16. «Павловская сессия» Сессия ВАСХНИЛ в июле-августе 1948г. Широкая идеологическая кампания против «реакционной» и «идеалистической» науки Триумф
- 17. William Ashby Вильям Эшби (1903 - 1972) - английский психиатр, специалист по кибернетике введение понятия «самоорганизующаяся
- 18. Norbert Wiener Норберт Винер (1894 - 1964) - американский учёный, выдающийся математик и философ Отец кибернетики
- 19. Петр Кузьмич Анохин концепция обратной связи теория функциональных систем http://ru.wikipedia.org/wiki/Анохин,_Пётр_Кузьмич
- 20. Алексей Алексеевич У́хтомский (1875 —1942) Согласно Ухтомскому, доминанта — временно господствующий очаг возбуждения в центральной нервной
- 21. НАУКА О ДВИЖЕНИИ СОВРЕМЕННОСТЬ
- 22. Сенсомоторная интеграция Сколько чувств у человека? Пять — те, что всем нам известны, то есть зрение,
- 23. Планирование движения Формирование траектории движения Решение обратной кинематической задачи Решение обратной динамической задачи Управление мышечным усилием.
- 24. Современные научные школы: Теория равновесной точки Теория схем Теория оптимального управления Концепция внутренних моделей
- 25. СТРУКТУРНО-ФУНКЦИОНАЛЬНАЯ ОРГАНИЗАЦИЯ ДВИГАТЕЛЬНОЙ СИСТЕМЫ
- 26. Мозжечок (предполагаемые функции) - анализ и предсказание пространственно-временных характеристик движения - формирование оптимальных траекторий и осуществление
- 27. Базальные ганглии
- 28. Базальные ганглии (предполагаемые функции) Striatum (полосатое тело) Pallidum (бледный шар) Субталамическое ядро Substrata nigra (черная субстанция)
- 29. Кора больших полушарий Лобная кора реакция организма на ситуацию – не действие, а принятие решения о
- 30. Кора больших полушарий синтез афферентной информации, зрительное внимание, пространственная оценка объектов, интегративная зрительно – пространственная деятельность
- 31. Кора больших полушарий управление позой, внутренняя схема тела (обобщенная внутренняя модель тела, включающая чувствительность его отдельных
- 32. Кора больших полушарий роль в реализации и коррекции движений Зрительная кора
- 33. Кора больших полушарий Клетки Беца - одни из самых больших нейронов ЦНС, их диаметр достигает 100
- 34. Кора больших полушарий торможение спинальных рефлекторных влияний, нарушающих эффективность выполнения движения, контроль силы и направления движения,
- 35. Кора больших полушарий. Гомункулус
- 36. Современные представления об управляющей системе мозга это система слабо связанных автоматов, работающих как иерархическая параметрическая система
- 37. МУЛЬТИДИСЦИПЛИНАРНЫЙ ХАРАКТЕР НАУКИ ОБ УПРАВЛЕНИИ ДВИЖЕНИЕМ
- 38. Управление движением Биомеханика Биокибернетика Моделирование Педагогика спорта Физиология Нейро- когнитивная наука
- 39. ПЕДАГОГИКА СПОРТА
- 40. Координационные способности Общие Физические качества Волевые Интеллек-туальные Специальные циклические локомоции, ациклические двигательные действия, нелокомоторные движения тела
- 41. реакция в элементарных движениях в комплексных движениях
- 42. равновесие динамическое статическое статокинетическая устойчивость уравновешивание предметов
- 43. кинестезическое дифференцирование силовые временные пространственные воспроизведение дифференцирование оценка отмеривание
- 44. ритм изменение воспроизведение в элементарных движениях (кистевые) в комплексных движениях (локомоции)
- 45. согласование движений последовательных скоростно-силовых
- 46. ориентирование в пространстве основанное на зрительном восприятии окружающих предметов в безопорном положении, основанное на мышечной чувствительности
- 47. перестроение двигательных действий в циклических локомоциях в ациклических движениях в спортивно - игровой деятельности непривычные, но
- 49. ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ
- 50. Психофизиологическое тестирование (элементарные движения)
- 51. Измерение времени реакции Схема отражает классический пример эксперимента по измерению времени реакции, в котором пробы отделены
- 52. Время реакции интервал времени от момента поступления сигнала до ответной реакции человека; Время ПЗМР может изменяться
- 53. Text Простая зрительно-моторная реакция (ПЗМР) Text Контактная и координационная треморометрия Реакция на движущийся объект (РДО) Теппинг-тест
- 54. Исследование генетических и средовых детерминант координационных способностей детей младшего школьного возраста Соколкиной В.А. (1991) указывают на
- 55. - способность к выполнению движений синхронно с внешними событиями - предвосхищение, предугадывание, представление о предмете или
- 56. Психофизиологическое тестирование (механограмма)
- 57. Механограмма - запись на бумаге или другом носителе (в том числе – электронном) механических параметров движения
- 58. Company Logo Дискретные движения Режим движения Циклические движения
- 59. Company Logo Это два базовых класса целесообразной двигательной активности: дискретные серийные движения (прообраз работы с клавиатурой
- 60. координационная сложность серийная сложность ГРАФИЧЕСКИЕ ДВИЖЕНИЯ
- 61. координационная сложность серийная сложность СЕРИЙНЫЕ ДВИЖЕНИЯ
- 62. Company Logo MT= a + b [ log2 (2A/W) ] MT – время движения, A –
- 63. Закон Фиттса описывает специфическую ситуацию – движение от стартовой точки до цели строго по прямой с
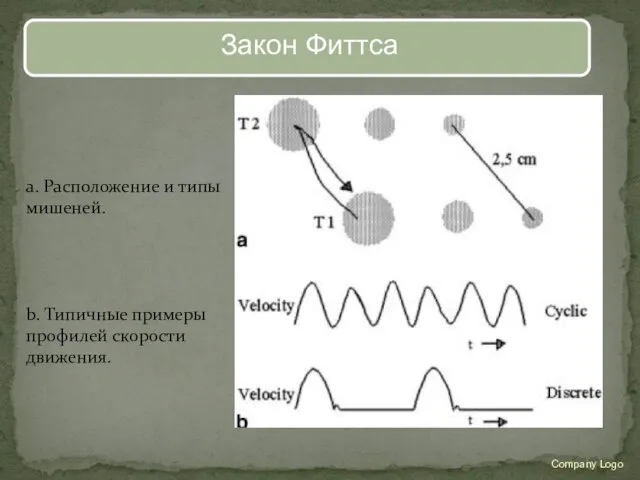
- 64. Company Logo a. Расположение и типы мишеней. b. Типичные примеры профилей скорости движения.
- 65. Психофизиологическое тестирование (односуставные движения)
- 66. Методика «КИД-3» - контрольный измеритель движения ПРАКТИЧЕСКАЯ ЧАСТЬ
- 67. Стабилография
- 68. Стабилография (stabilis – устойчивый) – метод регистрации движения общего центра давления тела человека на плоскость платформы,
- 69. «Стабилан – 01» Некоторые показатели: V, мм/с – скорость ЦД, Ells, кв.мм – площадь эллипса статокинезиграммы,
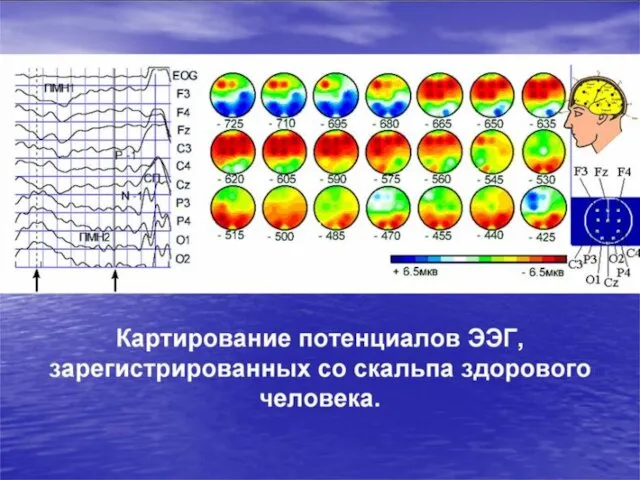
- 70. Электроэнцефалография (ЭЭГ)
- 71. – суммарная электрическая активность множества нейронов головного мозга, регистрируемая с поверхности головы.
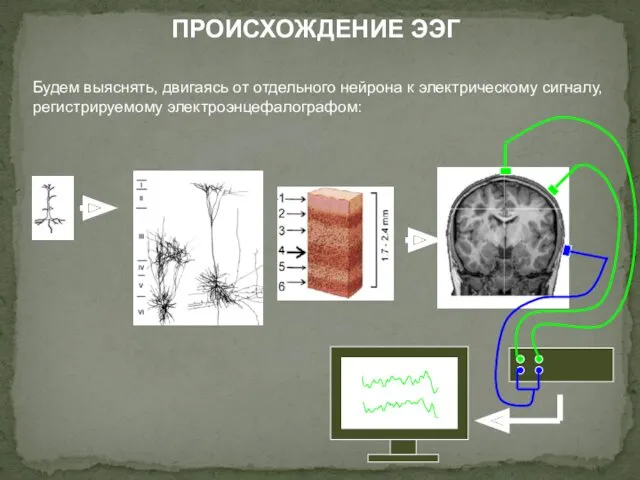
- 72. ПРОИСХОЖДЕНИЕ ЭЭГ Будем выяснять, двигаясь от отдельного нейрона к электрическому сигналу, регистрируемому электроэнцефалографом:
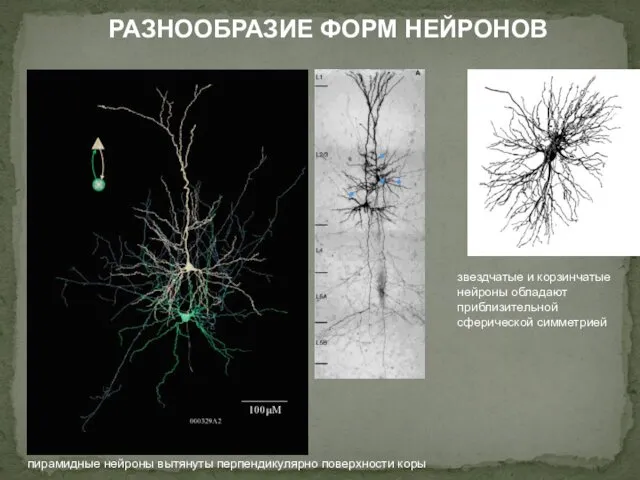
- 73. РАЗНООБРАЗИЕ ФОРМ НЕЙРОНОВ пирамидные нейроны вытянуты перпендикулярно поверхности коры звездчатые и корзинчатые нейроны обладают приблизительной сферической
- 76. нейрон является источником электрического тока электрический ток, порожденный каждым нейроном, распространяется во всем объеме головы суммарный
- 77. Трехмерный кинематический анализ
- 78. Система захвата движения Qualisys Система Qualisys относится к оптическим системам захвата движения, которая позволяет проводить кинематический
- 79. …специальное ПО (Qualisys Track Manager) вычисляет координаты каждого маркера в пространстве, соотнося данные с каждой камеры
- 80. Рисунки B1 – B4. Кинограмма сложного тактико-технического действия. B2 B3 B4 Покадровое воспроизведение и высокая скорость
- 82. Скачать презентацию
НАУКА О ДВИЖЕНИИ
ИСТОРИЧЕСКИЕ ВЕХИ
НАУКА О ДВИЖЕНИИ
ИСТОРИЧЕСКИЕ ВЕХИ
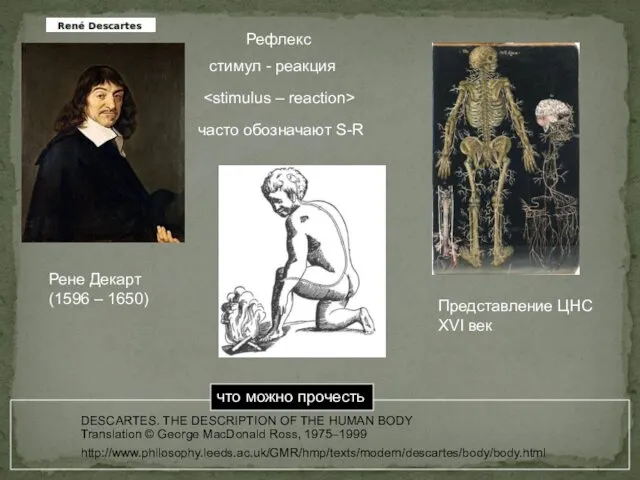
Рефлекс
стимул - реакция
http://www.philosophy.leeds.ac.uk/GMR/hmp/texts/modern/descartes/body/body.html
DESCARTES. THE DESCRIPTION OF THE HUMAN BODY
Translation
Рефлекс
стимул - реакция
http://www.philosophy.leeds.ac.uk/GMR/hmp/texts/modern/descartes/body/body.html DESCARTES. THE DESCRIPTION OF THE HUMAN BODY
Translation
Hermann von Helmholtz
впервые измерил скорость проведения сигнала по нерву.
До этого
Hermann von Helmholtz
впервые измерил скорость проведения сигнала по нерву.
До этого
http://en.wikipedia.org/wiki/Sir_Charles_Scott_Sherrington
Sir Charles Scott Sherrington
Развил представления об интегративной деятельности ЦНС
и роли
http://en.wikipedia.org/wiki/Sir_Charles_Scott_Sherrington
Sir Charles Scott Sherrington
Развил представления об интегративной деятельности ЦНС
и роли
http://wiki.myword.ru/index.php/Вудвортс_Роберт_СессионсВудвортс Р. Экспериментальная психология : сокр. пер. с англ. / Ред.
http://wiki.myword.ru/index.php/Вудвортс_Роберт_СессионсВудвортс Р. Экспериментальная психология : сокр. пер. с англ. / Ред.
Karl Lashley
серийная организация движений
< serial movements; sequencing >
Развил представления о способах
Karl Lashley
серийная организация движений
< serial movements; sequencing >
Развил представления о способах
Иван Михайлович Сеченов (1829 - 1905)
Основатель электрофизиологии. Показал, что существует связь
Иван Михайлович Сеченов (1829 - 1905)
Основатель электрофизиологии. Показал, что существует связь
http://en.wikipedia.org/wiki/Classical_conditioning
Иван Петрович Павлов (1849 - 1936)
Условный рефлекс
< classical conditioning; Pavlovian conditioning
http://en.wikipedia.org/wiki/Classical_conditioning
Иван Петрович Павлов (1849 - 1936)
Условный рефлекс
< classical conditioning; Pavlovian conditioning
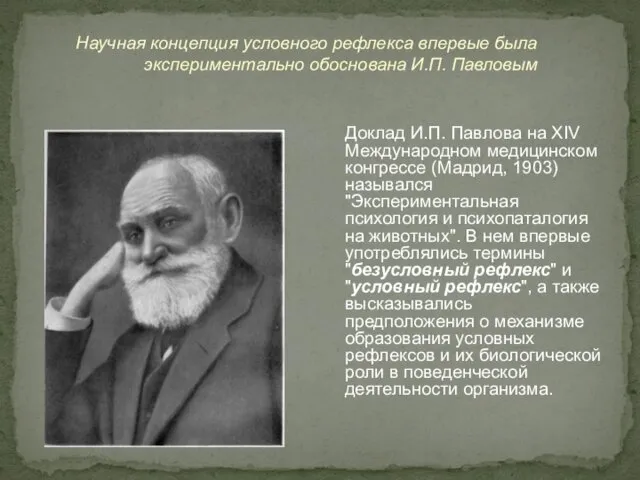
Научная концепция условного рефлекса впервые была экспериментально обоснована И.П. Павловым
Доклад И.П.
Научная концепция условного рефлекса впервые была экспериментально обоснована И.П. Павловым
Доклад И.П.

Павловская метафора
телефонной станции
Павловская метафора
телефонной станции
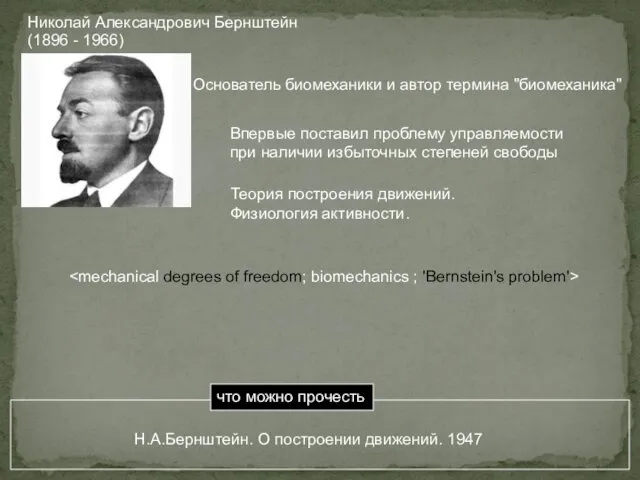
Николай Александрович Бернштейн (1896 - 1966)
Основатель биомеханики и автор термина "биомеханика"
Впервые
Николай Александрович Бернштейн (1896 - 1966)
Основатель биомеханики и автор термина "биомеханика"
Впервые
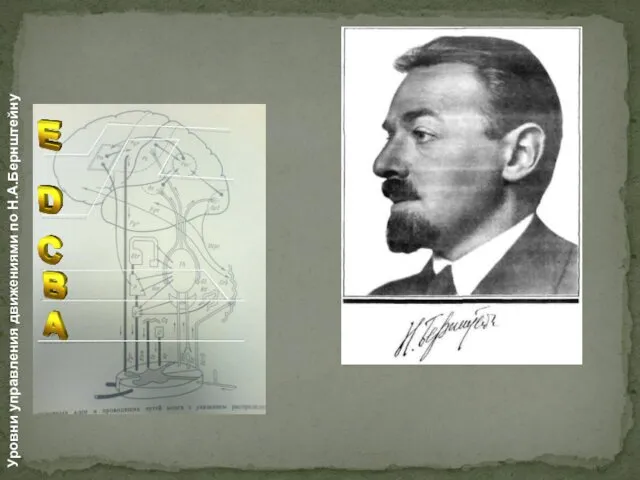
Уровни управления движениями по Н.А.Бернштейну
Уровни управления движениями по Н.А.Бернштейну
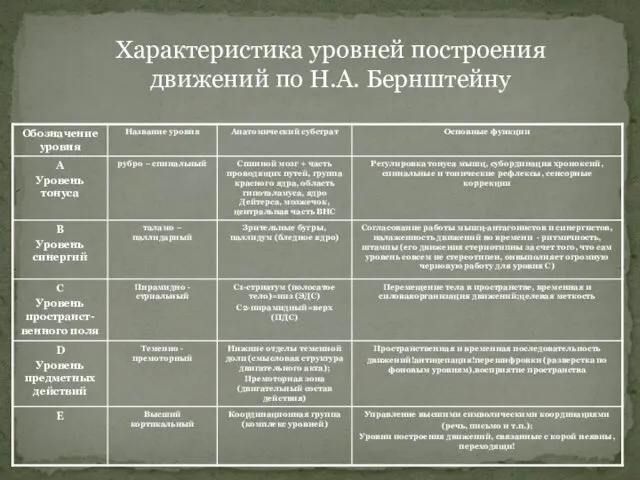
Характеристика уровней построения движений по Н.А. Бернштейну
Характеристика уровней построения движений по Н.А. Бернштейну
«Павловская сессия»
Сессия ВАСХНИЛ в июле-августе 1948г.
Широкая идеологическая кампания против «реакционной» и
«Павловская сессия»
Сессия ВАСХНИЛ в июле-августе 1948г.
Широкая идеологическая кампания против «реакционной» и
William Ashby
Вильям Эшби (1903 - 1972) - английский психиатр, специалист по
William Ashby
Вильям Эшби (1903 - 1972) - английский психиатр, специалист по
Norbert Wiener
Норберт Винер (1894 - 1964) - американский учёный,
выдающийся математик
Norbert Wiener
Норберт Винер (1894 - 1964) - американский учёный,
выдающийся математик
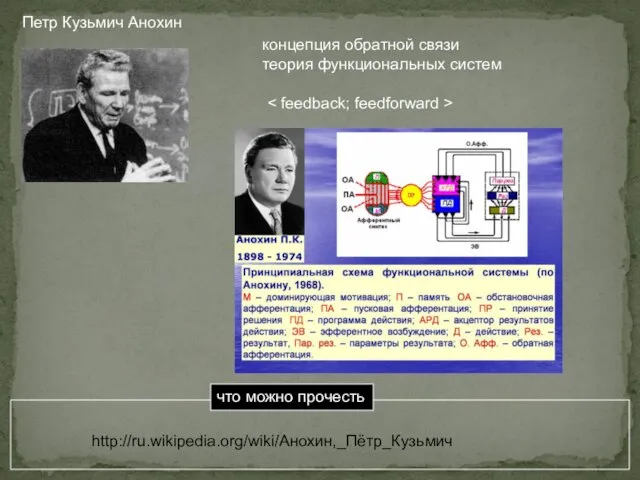
Петр Кузьмич Анохин
концепция обратной связи
теория функциональных систем
< feedback; feedforward >
http://ru.wikipedia.org/wiki/Анохин,_Пётр_Кузьмич
Петр Кузьмич Анохин
концепция обратной связи
теория функциональных систем
< feedback; feedforward >
http://ru.wikipedia.org/wiki/Анохин,_Пётр_Кузьмич
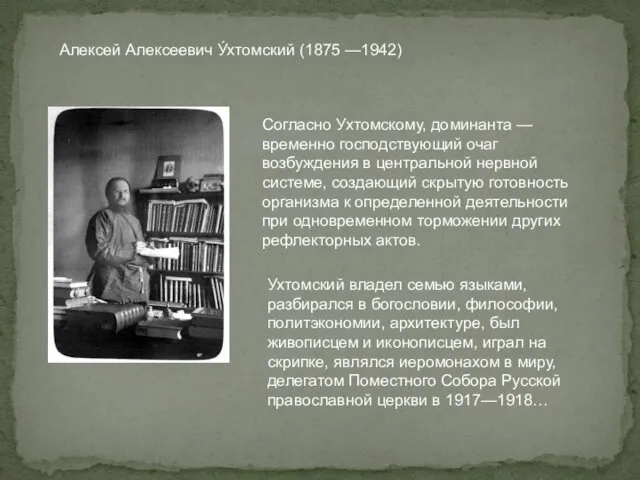
Алексей Алексеевич У́хтомский (1875 —1942)
Согласно Ухтомскому, доминанта — временно господствующий
Алексей Алексеевич У́хтомский (1875 —1942)
Согласно Ухтомскому, доминанта — временно господствующий
НАУКА О ДВИЖЕНИИ
СОВРЕМЕННОСТЬ
НАУКА О ДВИЖЕНИИ
СОВРЕМЕННОСТЬ
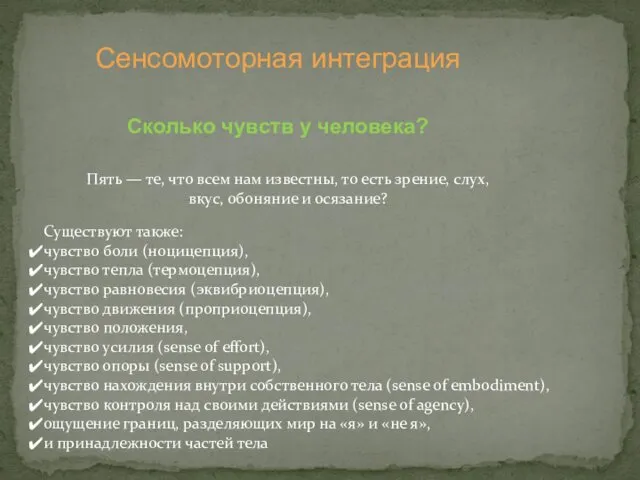
Сенсомоторная интеграция
Сколько чувств у человека?
Пять — те, что всем нам известны,
Сенсомоторная интеграция
Сколько чувств у человека?
Пять — те, что всем нам известны,
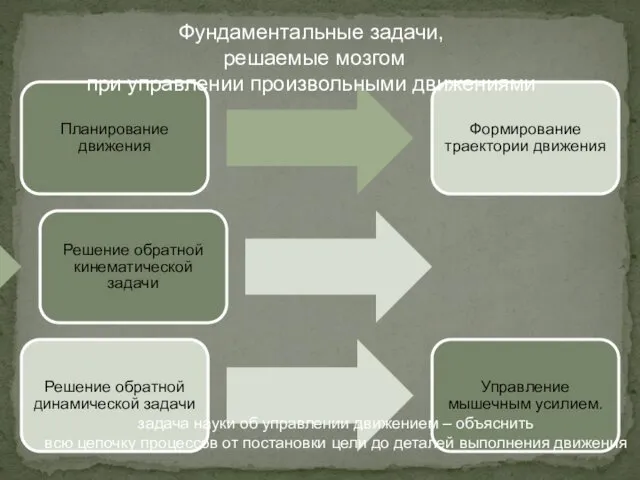
Планирование движения
Формирование траектории движения
Решение обратной кинематической задачи
Решение обратной динамической задачи
Управление мышечным
Планирование движения
Формирование траектории движения
Решение обратной кинематической задачи
Решение обратной динамической задачи
Управление мышечным
Современные научные школы:
Теория равновесной точки
Теория схем
Теория оптимального управления
Концепция внутренних моделей
Современные научные школы:
Теория равновесной точки
Теория схем
Теория оптимального управления
Концепция внутренних моделей
СТРУКТУРНО-ФУНКЦИОНАЛЬНАЯ
ОРГАНИЗАЦИЯ
ДВИГАТЕЛЬНОЙ СИСТЕМЫ
СТРУКТУРНО-ФУНКЦИОНАЛЬНАЯ
ОРГАНИЗАЦИЯ
ДВИГАТЕЛЬНОЙ СИСТЕМЫ
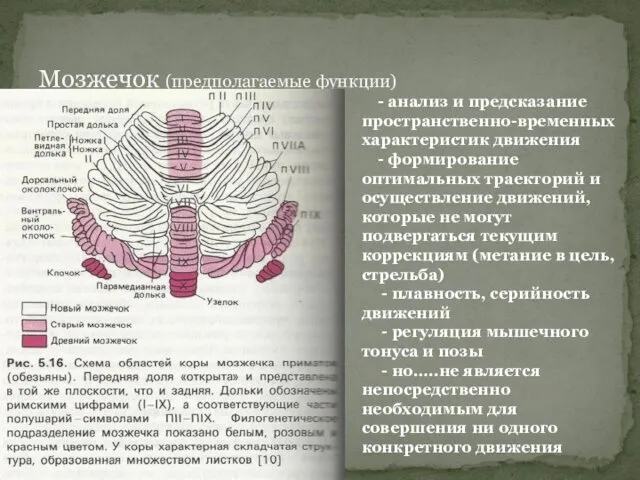
Мозжечок (предполагаемые функции)
- анализ и предсказание пространственно-временных характеристик движения
-
Мозжечок (предполагаемые функции)
- анализ и предсказание пространственно-временных характеристик движения -
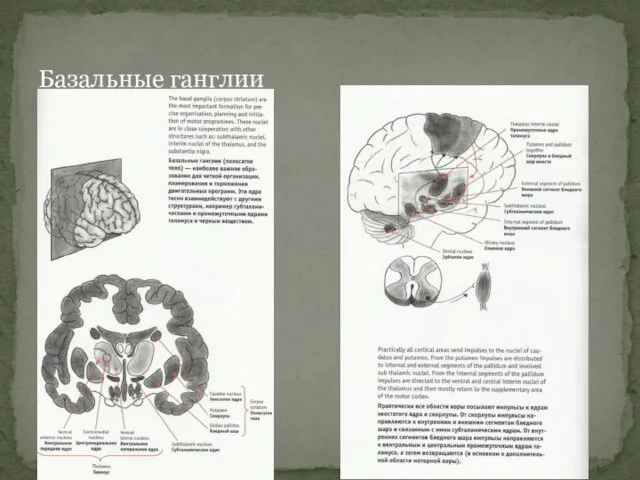
Базальные ганглии
Базальные ганглии
Базальные ганглии (предполагаемые функции)
Striatum (полосатое тело)
Pallidum (бледный шар)
Субталамическое ядро
Substrata nigra (черная
Базальные ганглии (предполагаемые функции)
Striatum (полосатое тело) Pallidum (бледный шар) Субталамическое ядро Substrata nigra (черная
Кора больших полушарий
Лобная кора
реакция организма на ситуацию – не действие,
Кора больших полушарий
Лобная кора
реакция организма на ситуацию – не действие,
Кора больших полушарий
синтез афферентной информации,
зрительное внимание,
пространственная оценка объектов,
интегративная
Кора больших полушарий
синтез афферентной информации, зрительное внимание, пространственная оценка объектов, интегративная
Кора больших полушарий
управление позой,
внутренняя схема тела (обобщенная внутренняя модель тела,
Кора больших полушарий
управление позой, внутренняя схема тела (обобщенная внутренняя модель тела,
Кора больших полушарий
роль в реализации и коррекции движений
Зрительная
кора
Кора больших полушарий
роль в реализации и коррекции движений
Зрительная
кора
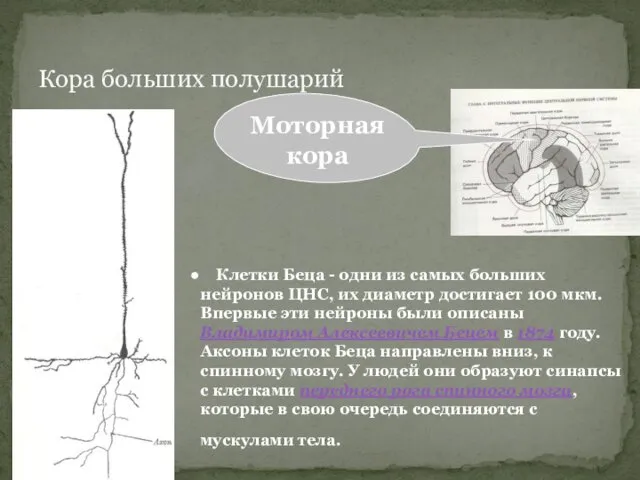
Кора больших полушарий
Клетки Беца - одни из самых больших нейронов
Кора больших полушарий
Клетки Беца - одни из самых больших нейронов
Кора больших полушарий
торможение спинальных рефлекторных влияний, нарушающих эффективность выполнения движения,
контроль силы
Кора больших полушарий
торможение спинальных рефлекторных влияний, нарушающих эффективность выполнения движения, контроль силы
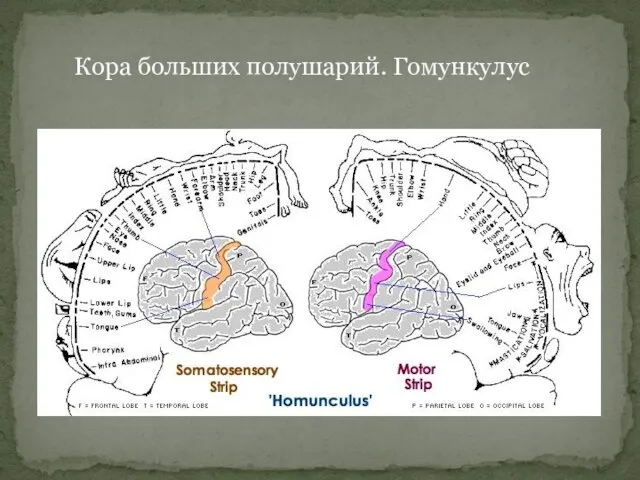
Кора больших полушарий. Гомункулус
Кора больших полушарий. Гомункулус
Современные представления
об управляющей системе мозга
это система слабо связанных автоматов, работающих
Современные представления
об управляющей системе мозга
это система слабо связанных автоматов, работающих
МУЛЬТИДИСЦИПЛИНАРНЫЙ ХАРАКТЕР
НАУКИ ОБ УПРАВЛЕНИИ ДВИЖЕНИЕМ
МУЛЬТИДИСЦИПЛИНАРНЫЙ ХАРАКТЕР
НАУКИ ОБ УПРАВЛЕНИИ ДВИЖЕНИЕМ
Управление движением
Биомеханика
Биокибернетика
Моделирование
Педагогика
спорта
Физиология
Нейро-
когнитивная наука
Управление движением
Биомеханика
Биокибернетика
Моделирование
Педагогика
спорта
Физиология
Нейро-
когнитивная наука
ПЕДАГОГИКА СПОРТА
ПЕДАГОГИКА СПОРТА
Координационные способности
Общие
Физические качества
Волевые
Интеллек-туальные
Специальные
циклические локомоции, ациклические двигательные действия, нелокомоторные движения тела в
Координационные способности
Общие
Физические качества
Волевые
Интеллек-туальные
Специальные
циклические локомоции, ациклические двигательные действия, нелокомоторные движения тела в
реакция
в элементарных движениях
в комплексных движениях
реакция
в элементарных движениях
в комплексных движениях
равновесие
динамическое
статическое
статокинетическая устойчивость
уравновешивание предметов
равновесие
динамическое
статическое
статокинетическая устойчивость
уравновешивание предметов
кинестезическое дифференцирование
силовые
временные
пространственные
воспроизведение
дифференцирование
оценка
отмеривание
кинестезическое дифференцирование
силовые
временные
пространственные
воспроизведение
дифференцирование
оценка
отмеривание
ритм
изменение
воспроизведение
в элементарных движениях (кистевые)
в комплексных движениях (локомоции)
ритм
изменение
воспроизведение
в элементарных движениях (кистевые)
в комплексных движениях (локомоции)
согласование движений
последовательных
скоростно-силовых
согласование движений
последовательных
скоростно-силовых
ориентирование в пространстве
основанное на зрительном восприятии окружающих предметов
в безопорном положении, основанное
ориентирование в пространстве
основанное на зрительном восприятии окружающих предметов
в безопорном положении, основанное
перестроение двигательных действий
в циклических локомоциях
в ациклических движениях
в спортивно - игровой деятельности
непривычные,
перестроение двигательных действий
в циклических локомоциях
в ациклических движениях
в спортивно - игровой деятельности
непривычные,
ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ
СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ
ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ
СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ
Психофизиологическое тестирование
(элементарные движения)
Психофизиологическое тестирование
(элементарные движения)
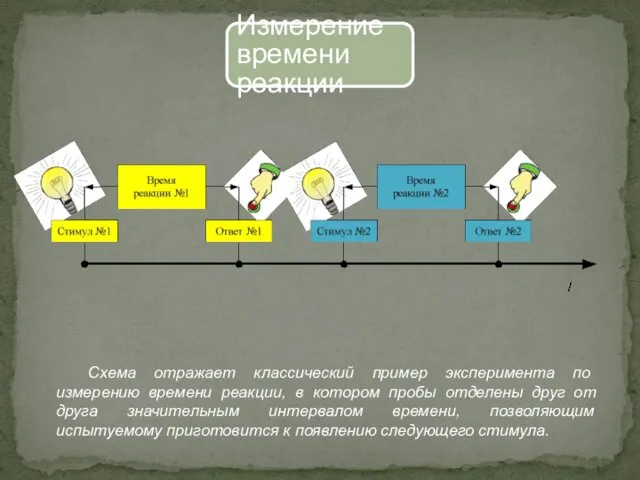
Измерение времени реакции
Схема отражает классический пример эксперимента по измерению времени реакции,
Измерение времени реакции
Схема отражает классический пример эксперимента по измерению времени реакции,
Время реакции
интервал времени от момента поступления сигнала до ответной реакции человека;
Время
Время реакции
интервал времени от момента поступления сигнала до ответной реакции человека;
Время

Text
Простая зрительно-моторная реакция (ПЗМР)
Text
Контактная и координационная треморометрия
Реакция на движущийся объект (РДО)
Теппинг-тест
Таблица
Text
Простая зрительно-моторная реакция (ПЗМР)
Text
Контактная и координационная треморометрия
Реакция на движущийся объект (РДО)
Теппинг-тест
Таблица
Исследование генетических и средовых детерминант координационных способностей детей младшего школьного возраста
Исследование генетических и средовых детерминант координационных способностей детей младшего школьного возраста
- способность к выполнению движений синхронно с внешними событиями
- предвосхищение, предугадывание,
- способность к выполнению движений синхронно с внешними событиями
- предвосхищение, предугадывание,
Психофизиологическое тестирование
(механограмма)
Психофизиологическое тестирование
(механограмма)
Механограмма - запись на бумаге или другом носителе (в том числе
Механограмма - запись на бумаге или другом носителе (в том числе

Company Logo
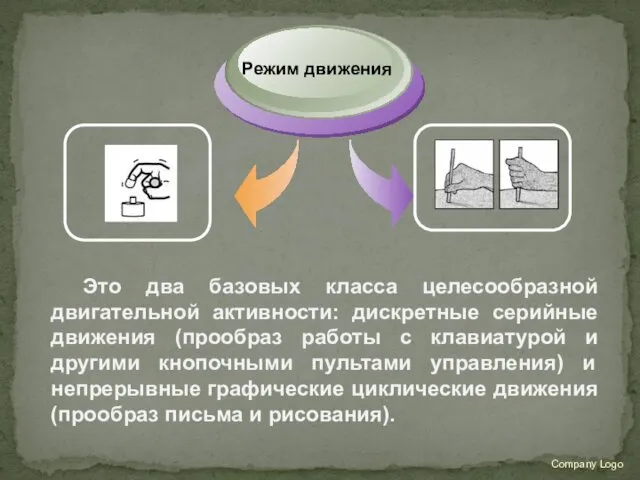
Дискретные движения
Режим движения
Циклические движения
Company Logo
Дискретные движения
Режим движения
Циклические движения
Company Logo
Это два базовых класса целесообразной двигательной активности: дискретные серийные движения
Company Logo
Это два базовых класса целесообразной двигательной активности: дискретные серийные движения
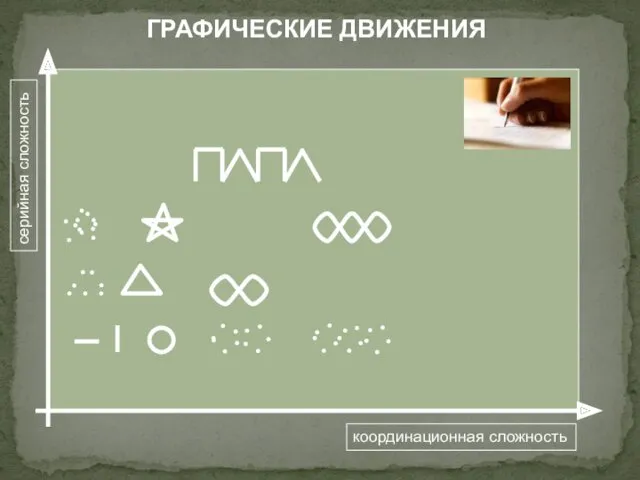
координационная сложность
серийная сложность
ГРАФИЧЕСКИЕ ДВИЖЕНИЯ
координационная сложность
серийная сложность
ГРАФИЧЕСКИЕ ДВИЖЕНИЯ

координационная сложность
серийная сложность
СЕРИЙНЫЕ ДВИЖЕНИЯ
координационная сложность
серийная сложность
СЕРИЙНЫЕ ДВИЖЕНИЯ
![Company Logo MT= a + b [ log2 (2A/W) ]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/106752/slide-61.jpg)
Company Logo
MT= a + b [ log2 (2A/W) ]
MT – время
Company Logo
MT= a + b [ log2 (2A/W) ]
MT – время
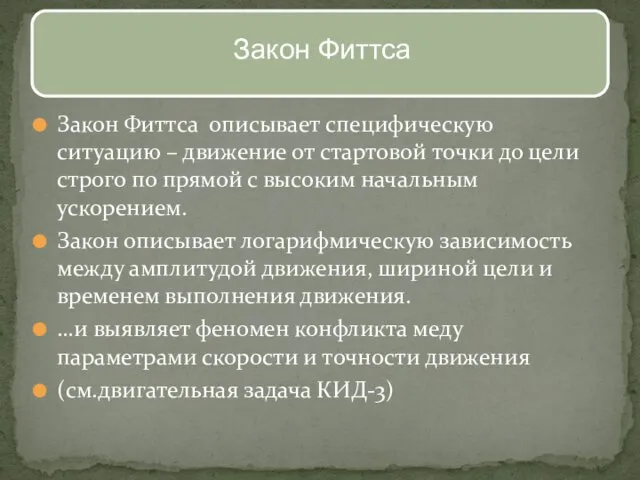
Закон Фиттса описывает специфическую ситуацию – движение от стартовой точки до
Закон Фиттса описывает специфическую ситуацию – движение от стартовой точки до
Company Logo
a. Расположение и типы мишеней.
b. Типичные примеры профилей скорости движения.
Company Logo
a. Расположение и типы мишеней.
b. Типичные примеры профилей скорости движения.
Психофизиологическое тестирование
(односуставные движения)
Психофизиологическое тестирование
(односуставные движения)
Методика «КИД-3» -
контрольный измеритель движения
ПРАКТИЧЕСКАЯ ЧАСТЬ
Методика «КИД-3» -
контрольный измеритель движения
ПРАКТИЧЕСКАЯ ЧАСТЬ
Стабилография
Стабилография
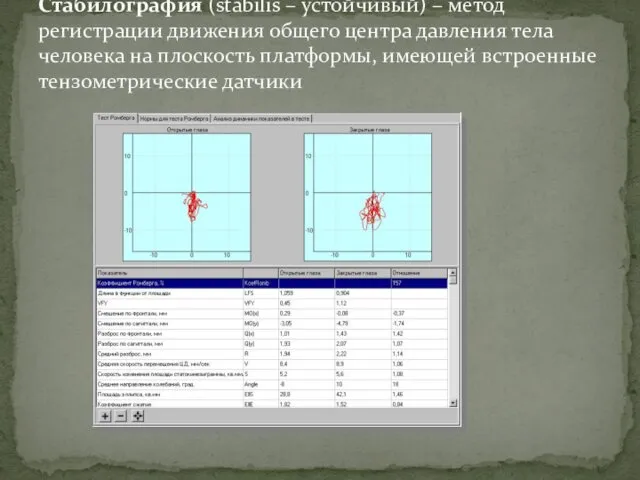
Стабилография (stabilis – устойчивый) – метод регистрации движения общего центра давления
Стабилография (stabilis – устойчивый) – метод регистрации движения общего центра давления
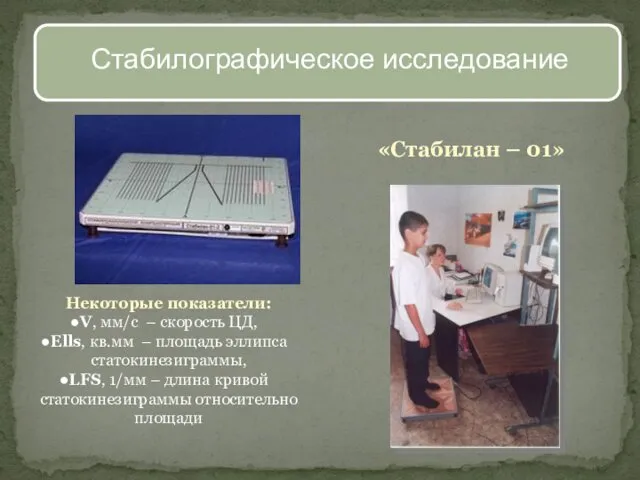
«Стабилан – 01»
Некоторые показатели:
V, мм/с – скорость ЦД,
Ells, кв.мм – площадь
«Стабилан – 01»
Некоторые показатели:
V, мм/с – скорость ЦД,
Ells, кв.мм – площадь
Электроэнцефалография
(ЭЭГ)
Электроэнцефалография
(ЭЭГ)
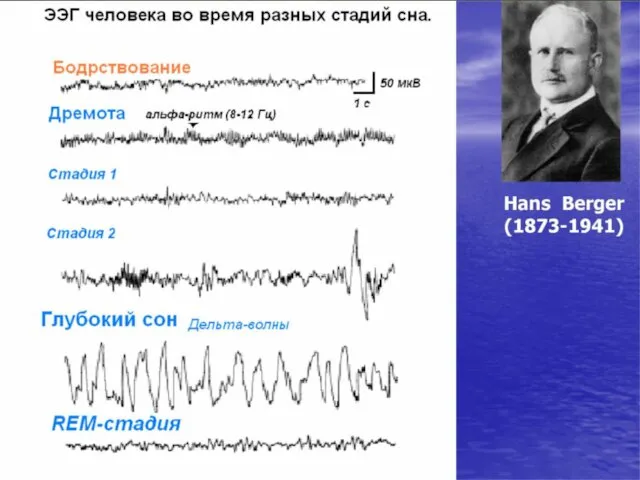
– суммарная электрическая активность множества нейронов головного мозга, регистрируемая с
– суммарная электрическая активность множества нейронов головного мозга, регистрируемая с
ПРОИСХОЖДЕНИЕ ЭЭГ
Будем выяснять, двигаясь от отдельного нейрона к электрическому сигналу,
регистрируемому электроэнцефалографом:
ПРОИСХОЖДЕНИЕ ЭЭГ
Будем выяснять, двигаясь от отдельного нейрона к электрическому сигналу,
регистрируемому электроэнцефалографом:
РАЗНООБРАЗИЕ ФОРМ НЕЙРОНОВ
пирамидные нейроны вытянуты перпендикулярно поверхности коры
звездчатые и корзинчатые
нейроны обладают
РАЗНООБРАЗИЕ ФОРМ НЕЙРОНОВ
пирамидные нейроны вытянуты перпендикулярно поверхности коры
звездчатые и корзинчатые
нейроны обладают
нейрон является источником электрического тока
электрический ток, порожденный каждым нейроном,
распространяется во
нейрон является источником электрического тока
электрический ток, порожденный каждым нейроном,
распространяется во
Трехмерный кинематический анализ
Трехмерный кинематический анализ

Система захвата движения Qualisys
Система Qualisys относится к оптическим системам захвата движения,
Система захвата движения Qualisys
Система Qualisys относится к оптическим системам захвата движения,
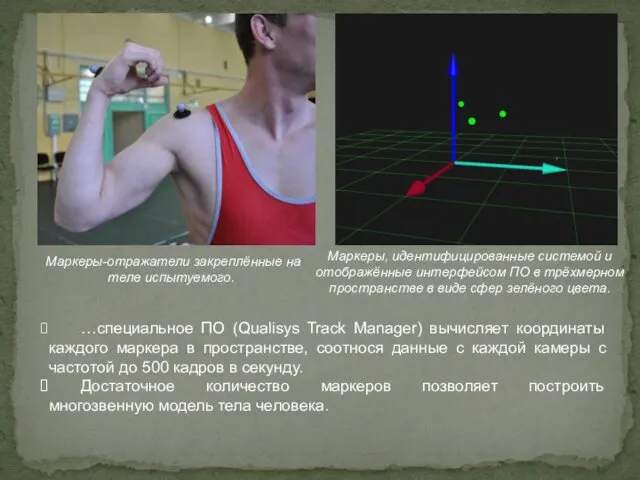
…специальное ПО (Qualisys Track Manager) вычисляет координаты каждого маркера в пространстве,
…специальное ПО (Qualisys Track Manager) вычисляет координаты каждого маркера в пространстве,
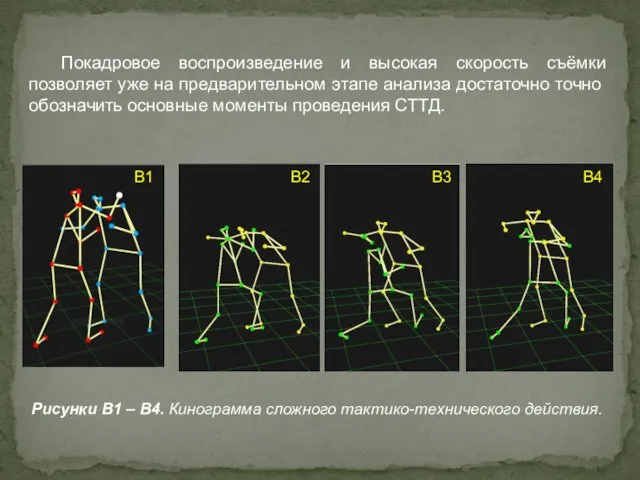
Рисунки B1 – B4. Кинограмма сложного тактико-технического действия.
B2
B3
B4
Покадровое воспроизведение и высокая
Рисунки B1 – B4. Кинограмма сложного тактико-технического действия.
B2
B3
B4
Покадровое воспроизведение и высокая
 Лечение отеков до появления диуретиков
Лечение отеков до появления диуретиков Інструментальні методи дослідження
Інструментальні методи дослідження Методы иммунодиагностики и иммунопрофилактики инфекционных болезней
Методы иммунодиагностики и иммунопрофилактики инфекционных болезней Био кремний
Био кремний Вещества преимущественно удушающего действия (пульмонотоксиканты)
Вещества преимущественно удушающего действия (пульмонотоксиканты) Лечебная физкультура при заболеваниях гепатобилиарной системы
Лечебная физкультура при заболеваниях гепатобилиарной системы Логопедическая работа по формированию коммуникативных навыков у дошкольников с общим недоразвитием речи
Логопедическая работа по формированию коммуникативных навыков у дошкольников с общим недоразвитием речи Метаболический синдром
Метаболический синдром Модель современной медицинской сестры
Модель современной медицинской сестры Патобиохимия печени
Патобиохимия печени Расстройства чувствительности, боль. Атаксии
Расстройства чувствительности, боль. Атаксии Система гигиенических мероприятий по созданию охранительного режима и благоприятных условий пребывания больных в ЛПУ
Система гигиенических мероприятий по созданию охранительного режима и благоприятных условий пребывания больных в ЛПУ Современные технологии диагностики и коррекции нарушений развития у детей с патологией речи в условиях реализации ФГОС
Современные технологии диагностики и коррекции нарушений развития у детей с патологией речи в условиях реализации ФГОС Медико-биологические проблемы спортивной науки
Медико-биологические проблемы спортивной науки Страховая модель здравоохранения
Страховая модель здравоохранения Энтеральные вирусные гепатиты А и Е
Энтеральные вирусные гепатиты А и Е Өкпе ісігі
Өкпе ісігі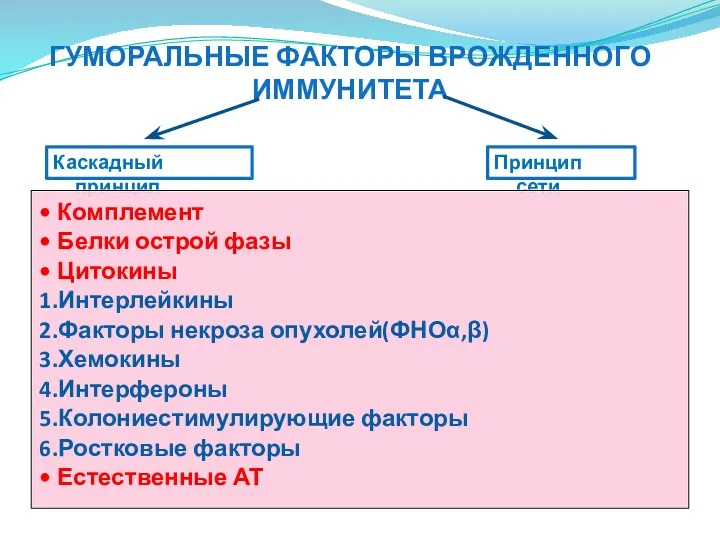 Гуморальные факторы врожденного иммунитета
Гуморальные факторы врожденного иммунитета Лихорадки у детей
Лихорадки у детей Тиреоидиты. Классификация
Тиреоидиты. Классификация Геморагическии шок в акушерстве
Геморагическии шок в акушерстве Классификация, мониторирование, лечение бронхиальной астмы у детей
Классификация, мониторирование, лечение бронхиальной астмы у детей Недостаточность кровообращения
Недостаточность кровообращения Альбинизм. Причины альбинизма
Альбинизм. Причины альбинизма Неправильные положения плода. Патологические вставления головки плода. Тема 6
Неправильные положения плода. Патологические вставления головки плода. Тема 6 Сосудистые заболевания спинного мозга
Сосудистые заболевания спинного мозга Тірек-қимыл жүйесінің балалардағы ерекшеліктері
Тірек-қимыл жүйесінің балалардағы ерекшеліктері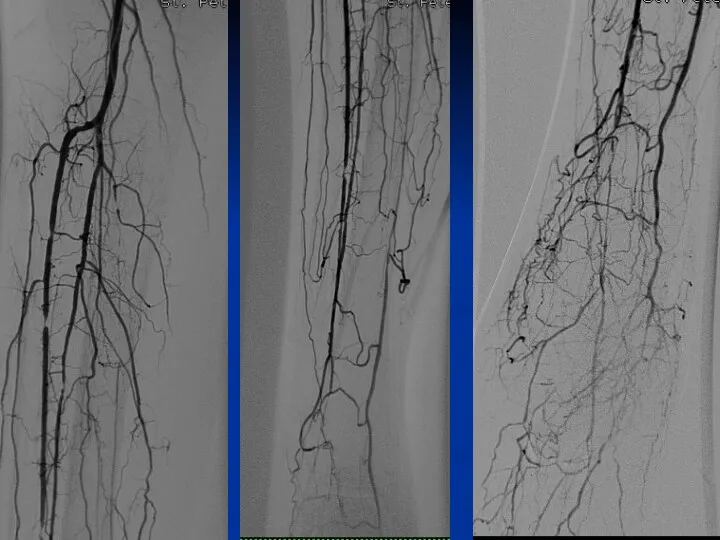 Артериальные доступы, используемые для выполнения ПАП у пациентов с КИНК
Артериальные доступы, используемые для выполнения ПАП у пациентов с КИНК