Разработка программного обеспечения для получения 3D модели с использованием камеры и проектора презентация
- Разработка программного обеспечения для получения 3D модели с использованием камеры и проектора

Содержание
- 2. Актуальность В настоящее время в различных областях деятельности, в таких как производство, медицина, компьютерная графика, робототехника
- 3. Пример использования алгоритмов в видеоиграх
- 4. Цель Разработка интуитивно понятного ПО для восстановления трехмерной структуры объекта, например, лиц людей, используя одну камеру
- 5. Задача решается не впервые, но Задача по прежнему современна Задача восстребовательна Проблемы
- 6. Основные задачи Провести анализ статей по теме задания; Выполнить поиск существующих алгоритмов решения задачи; Собрать стенд
- 7. Идея активного параллаксного метода регистрации трехмерных объектов Если использовать для регистрации трехмерных объектов неизменные картины с
- 8. Идея активного параллаксного метода регистрации трехмерных объектов Идея этого метода состоит в том, чтобы кодировать положение
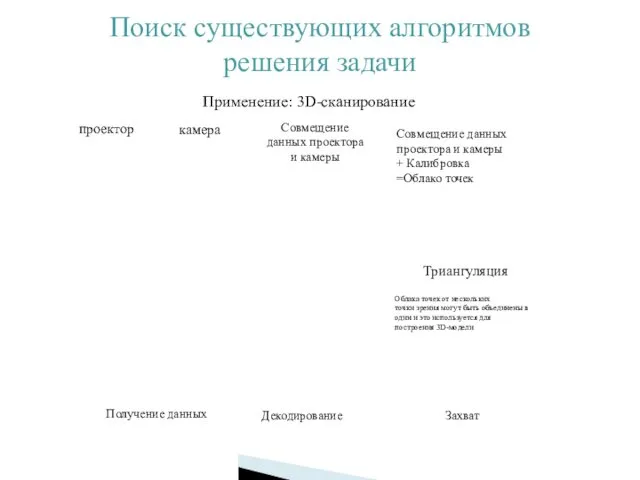
- 9. Поиск существующих алгоритмов решения задачи
- 10. Поиск существующих алгоритмов решения задачи Облака точек от нескольких точки зрения могут быть объединены в один
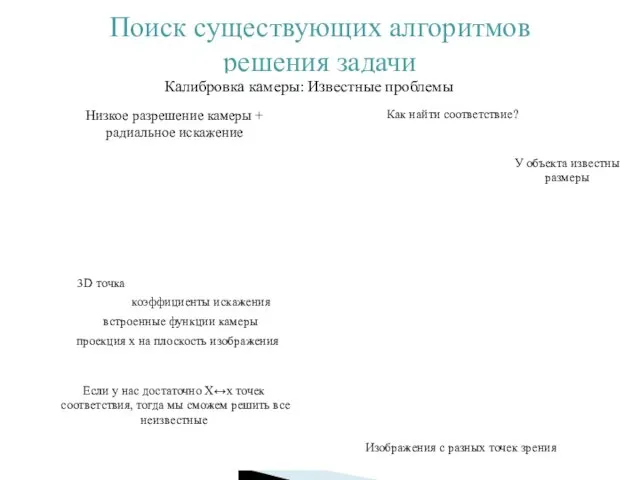
- 11. Поиск существующих алгоритмов решения задачи Низкое разрешение камеры + радиальное искажение встроенные функции камеры 3D точка
- 12. Поиск существующих алгоритмов решения задачи Проектор работает как обратная камера Используем такое же решение для описания
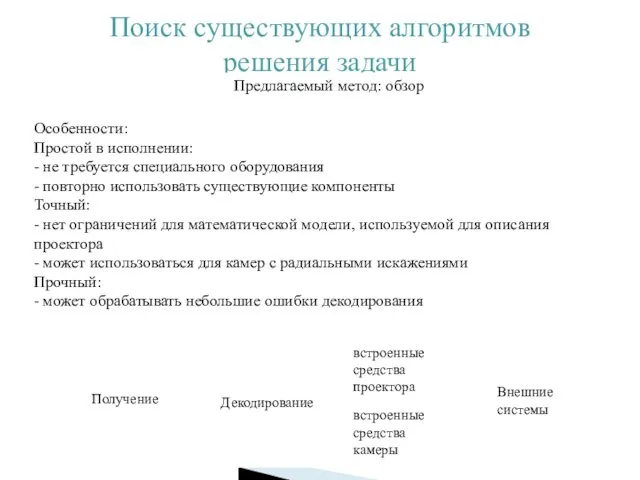
- 13. Поиск существующих алгоритмов решения задачи Предлагаемый метод: обзор Получение Особенности: Простой в исполнении: - не требуется
- 14. Поиск существующих алгоритмов решения задачи Предлагаемый метод: применение
- 15. Поиск существующих алгоритмов решения задачи Предлагаемый метод: декодирование Декодирование зависит от проецируемого шаблона Метод не полагается
- 16. Поиск существующих алгоритмов решения задачи Предлагаемый метод: калибровка проектора Поверхность плоская: на самом деле шахматная доска
- 17. Поиск существующих алгоритмов решения задачи Предлагаемый метод: калибровка проектора Расшифруйте структурированный-светлый шаблон: карта репроектора камеры Найти
- 18. Поиск существующих алгоритмов решения задачи Калибровка камеры и экструзия системы Используя угловые положения в координатах изображения
- 19. Сборка стенда Стенд состоит из ноутбука модели Toshiba Satellite, проектора Hitachi CP-RX60 и вебкамеры Microsoft HD
- 20. Выбор среды разработки и установка всего необходимого ПО В разработке системы используются такие программные средства, как
- 21. Выбор среды разработки и установка всего необходимого ПО В разработке системы используются такие программные средства: Microsoft
- 22. Выбор среды разработки и установка всего необходимого ПО В разработке системы используются такие программные средства: Для
- 23. Основные функции разрабатываемого ПО Интуитивно понятный, удобный и функциональный графический интерфейс Программа должна обеспечивать следующие функции:
- 24. Основные функции разрабатываемого ПО Программа должна работать с большинством веб камер и проекторов, определяя разрешающую способность
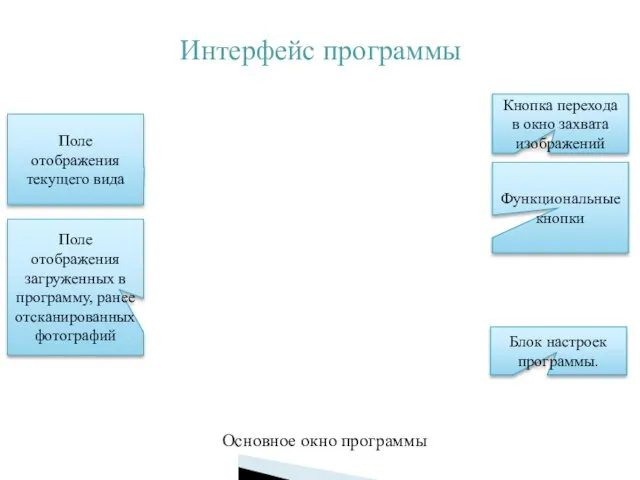
- 25. Интерфейс программы Основное окно программы Поле отображения загруженных в программу, ранее отсканированных фотографий Поле отображения текущего
- 26. Интерфейс программы Окно захвата изображений Поле для настройки пути, где будет создана папка с отсканированными фотографиями
- 27. Основные этапы работы программы Основное окно программы 1. Кнопка перехода в окно захвата изображений
- 28. Основные этапы работы программы Окно захвата изображений 3. Поле для настройки пути, где будет создана папка
- 29. Основные этапы работы программы Меняем положение шахматной доски, путем поворачивания ее и снова нажимаем кнопку захват.
- 30. Основные этапы работы программы Основное окно программы Распознание углов извлечения Поле отображения созданных папок в которых
- 31. Открытие 3D модели в MashLab
- 32. Открытие 3D модели в MashLab
- 33. Выводы Разработанная программа позволяет создавать восстановление трехмерных объектов активным параллаксным методом с использованием структурированной подсветки методом
- 35. Скачать презентацию
Актуальность
В настоящее время в различных областях деятельности, в таких как производство,
Актуальность
В настоящее время в различных областях деятельности, в таких как производство,
Пример использования алгоритмов в видеоиграх
Пример использования алгоритмов в видеоиграх
Цель
Разработка интуитивно понятного ПО для восстановления трехмерной структуры объекта, например, лиц
Цель
Разработка интуитивно понятного ПО для восстановления трехмерной структуры объекта, например, лиц
Задача решается не впервые, но
Задача по прежнему современна
Задача восстребовательна
Проблемы
Задача решается не впервые, но
Задача по прежнему современна
Задача восстребовательна
Проблемы
Основные задачи
Провести анализ статей по теме задания;
Выполнить поиск существующих алгоритмов решения
Основные задачи
Провести анализ статей по теме задания;
Выполнить поиск существующих алгоритмов решения
Идея активного параллаксного метода регистрации трехмерных объектов
Если использовать для регистрации трехмерных
Идея активного параллаксного метода регистрации трехмерных объектов
Если использовать для регистрации трехмерных
Идея активного параллаксного метода регистрации трехмерных объектов
Идея этого метода состоит в
Идея активного параллаксного метода регистрации трехмерных объектов
Идея этого метода состоит в
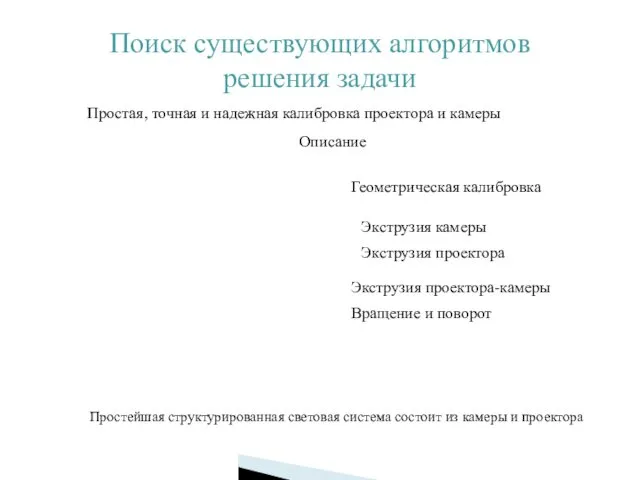
Поиск существующих алгоритмов
решения задачи
Поиск существующих алгоритмов
решения задачи
Поиск существующих алгоритмов
решения задачи
Облака точек от нескольких
точки зрения могут быть объединены
Поиск существующих алгоритмов
решения задачи
Облака точек от нескольких
точки зрения могут быть объединены
Поиск существующих алгоритмов
решения задачи
Низкое разрешение камеры + радиальное искажение
встроенные функции камеры
Поиск существующих алгоритмов
решения задачи
Низкое разрешение камеры + радиальное искажение
встроенные функции камеры
Поиск существующих алгоритмов
решения задачи
Проектор работает как обратная камера
Используем такое же решение
Поиск существующих алгоритмов
решения задачи
Проектор работает как обратная камера
Используем такое же решение
Поиск существующих алгоритмов
решения задачи
Предлагаемый метод: обзор
Получение
Особенности:
Простой в исполнении:
- не требуется специального
Поиск существующих алгоритмов
решения задачи
Предлагаемый метод: обзор
Получение
Особенности:
Простой в исполнении:
- не требуется специального
Поиск существующих алгоритмов
решения задачи
Предлагаемый метод: применение
Поиск существующих алгоритмов
решения задачи
Предлагаемый метод: применение
Поиск существующих алгоритмов
решения задачи
Предлагаемый метод: декодирование
Декодирование зависит от проецируемого шаблона
Метод
Поиск существующих алгоритмов
решения задачи
Предлагаемый метод: декодирование
Декодирование зависит от проецируемого шаблона
Метод
Поиск существующих алгоритмов
решения задачи
Предлагаемый метод: калибровка проектора
Поверхность плоская: на самом
Поиск существующих алгоритмов
решения задачи
Предлагаемый метод: калибровка проектора
Поверхность плоская: на самом
Поиск существующих алгоритмов
решения задачи
Предлагаемый метод: калибровка проектора
Расшифруйте структурированный-светлый шаблон: карта
Поиск существующих алгоритмов
решения задачи
Предлагаемый метод: калибровка проектора
Расшифруйте структурированный-светлый шаблон: карта
Поиск существующих алгоритмов
решения задачи
Калибровка камеры и экструзия системы
Используя угловые положения
Поиск существующих алгоритмов
решения задачи
Калибровка камеры и экструзия системы
Используя угловые положения
Сборка стенда
Стенд состоит из ноутбука модели Toshiba Satellite, проектора Hitachi CP-RX60
Сборка стенда
Стенд состоит из ноутбука модели Toshiba Satellite, проектора Hitachi CP-RX60
Выбор среды разработки
и установка всего необходимого ПО
В разработке системы используются такие
Выбор среды разработки
и установка всего необходимого ПО
В разработке системы используются такие
Выбор среды разработки
и установка всего необходимого ПО
В разработке системы используются такие
Выбор среды разработки
и установка всего необходимого ПО
В разработке системы используются такие
Выбор среды разработки
и установка всего необходимого ПО
В разработке системы используются такие
Выбор среды разработки
и установка всего необходимого ПО
В разработке системы используются такие
Основные функции разрабатываемого ПО
Интуитивно понятный, удобный и функциональный графический интерфейс
Программа должна
Основные функции разрабатываемого ПО
Интуитивно понятный, удобный и функциональный графический интерфейс
Программа должна
Основные функции разрабатываемого ПО
Программа должна работать с большинством веб камер и
Основные функции разрабатываемого ПО
Программа должна работать с большинством веб камер и
Интерфейс программы
Основное окно программы
Поле отображения загруженных в программу, ранее отсканированных фотографий
Интерфейс программы
Основное окно программы
Поле отображения загруженных в программу, ранее отсканированных фотографий
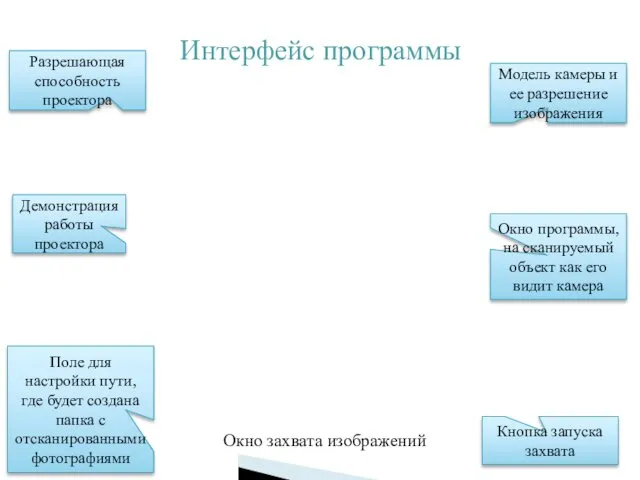
Интерфейс программы
Окно захвата изображений
Поле для настройки пути, где будет создана папка
Интерфейс программы
Окно захвата изображений
Поле для настройки пути, где будет создана папка
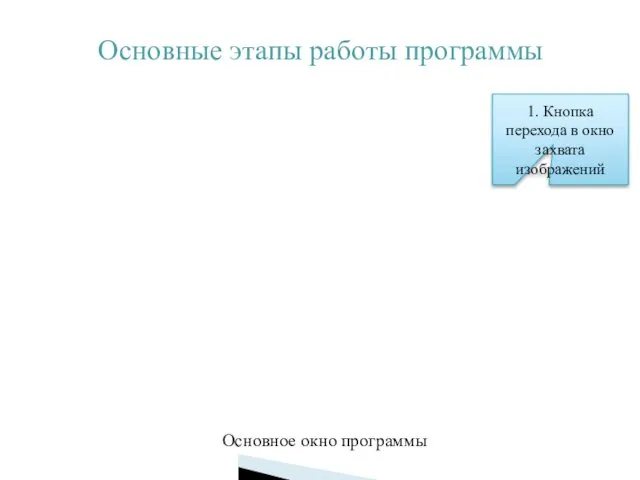
Основные этапы работы программы
Основное окно программы
1. Кнопка перехода в окно захвата
Основные этапы работы программы
Основное окно программы
1. Кнопка перехода в окно захвата
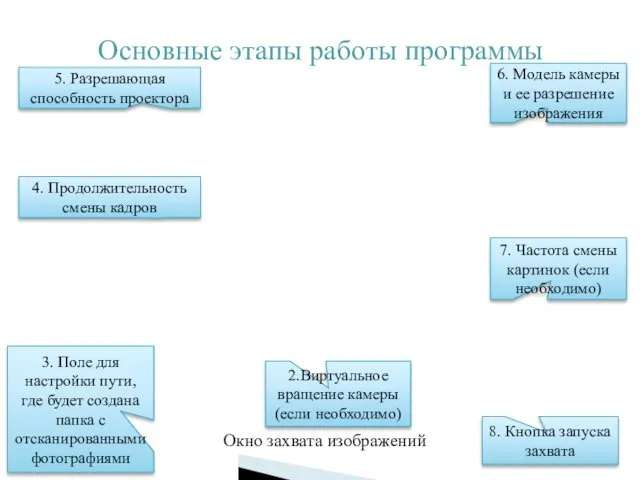
Основные этапы работы программы
Окно захвата изображений
3. Поле для настройки пути, где
Основные этапы работы программы
Окно захвата изображений
3. Поле для настройки пути, где
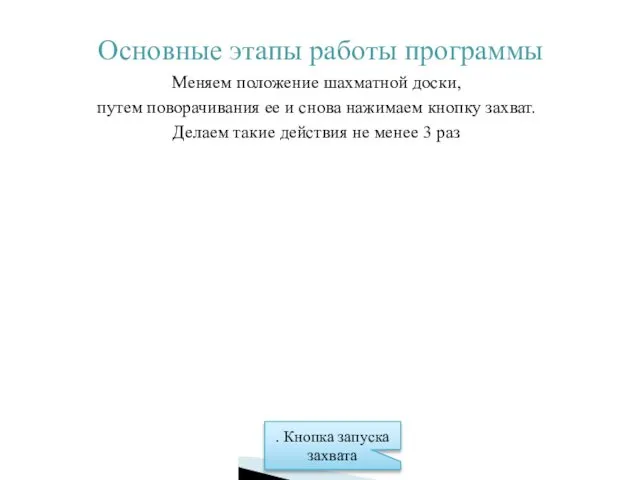
Основные этапы работы программы
Меняем положение шахматной доски,
путем поворачивания ее и снова
Основные этапы работы программы
Меняем положение шахматной доски,
путем поворачивания ее и снова
Основные этапы работы программы
Основное окно программы
Распознание углов извлечения
Поле отображения созданных папок
Основные этапы работы программы
Основное окно программы
Распознание углов извлечения
Поле отображения созданных папок
Открытие 3D модели в MashLab
Открытие 3D модели в MashLab
Открытие 3D модели в MashLab
Открытие 3D модели в MashLab
Выводы
Разработанная программа позволяет создавать восстановление трехмерных объектов активным параллаксным методом с
Выводы
Разработанная программа позволяет создавать восстановление трехмерных объектов активным параллаксным методом с
 Human Computer Interaction. Lecture 4
Human Computer Interaction. Lecture 4 Презентации к урокам. 11 класс Диск
Презентации к урокам. 11 класс Диск Компания Autodesk
Компания Autodesk Базы данных. Системы управления базами данных. Лекция 3
Базы данных. Системы управления базами данных. Лекция 3 Cascading style sheets
Cascading style sheets Види комп'ютерної графіки
Види комп'ютерної графіки Компьютерные презентации
Компьютерные презентации Создание мобильной версии Интернет-сайта
Создание мобильной версии Интернет-сайта Introduction of the Navigation and ILS, VOR/DME
Introduction of the Navigation and ILS, VOR/DME Общие понятия теории графов
Общие понятия теории графов Основы алгоритмизации и программирования на языках высокого уровня
Основы алгоритмизации и программирования на языках высокого уровня Компьютерная игра Tower Defense
Компьютерная игра Tower Defense Понятие информации и измерение информации
Понятие информации и измерение информации Введение в методы параллельного программирования
Введение в методы параллельного программирования Anomaly detection
Anomaly detection Транспортные технологии глобальных сетей
Транспортные технологии глобальных сетей How to made a DOS Bootable USB Stick and flash your Vbios
How to made a DOS Bootable USB Stick and flash your Vbios Дизайн ЭОР (Рекомендации специалистов)
Дизайн ЭОР (Рекомендации специалистов) Информатика лидері
Информатика лидері Информационные технологии автоматизированного проектирования
Информационные технологии автоматизированного проектирования Арифметические операции и функции,
Арифметические операции и функции, тест Растровая и векторная графика
тест Растровая и векторная графика Кодування та декодування повідомлень
Кодування та декодування повідомлень Знакомство с Интернетом
Знакомство с Интернетом Презентация Логика. Тренировочные задания ЕГЭ
Презентация Логика. Тренировочные задания ЕГЭ Курсовая работа. Разработка сетевого программного обеспечения
Курсовая работа. Разработка сетевого программного обеспечения Методы решения задачи №11 ЕГЭ-2016 по информатике
Методы решения задачи №11 ЕГЭ-2016 по информатике Беспроводные каналы
Беспроводные каналы